工位采集画面定制处理平台的制作方法
1.本发明涉及图像识别领域,尤其涉及一种工位采集画面定制处理平台。
背景技术:
2.图像识别可能是以图像的主要特征为基础的。每个图像都有它的特征,如字母a有个尖,p有个圈、而y的中心有个锐角等。对图像识别时眼动的研究表明,视线总是集中在图像的主要特征上,也就是集中在图像轮廓曲度最大或轮廓方向突然改变的地方,这些地方的信息量最大。而且眼睛的扫描路线也总是依次从一个特征转到另一个特征上。由此可见,在图像识别过程中,知觉机制必须排除输入的多余信息,抽出关键的信息。同时,在大脑里必定有一个负责整合信息的机制,它能把分阶段获得的信息整理成一个完整的知觉映象。在人类图像识别系统中,对复杂图像的识别往往要通过不同层次的信息加工才能实现。对于熟悉的图形,由于掌握了它的主要特征,就会把它当作一个单元来识别,而不再注意它的细节了。这种由孤立的单元材料组成的整体单位叫做组块,每一个组块是同时被感知的。在文字材料的识别中,人们不仅可以把一个汉字的笔划或偏旁等单元组成一个组块,而且能把经常在一起出现的字或词组成组块单位来加以识别。
3.目前,在采用皮带传送机构完成对待灌装饮料瓶体的灌装操作之前,需要对待灌装饮料瓶体的高度进行检测,以辨别其高度是否满足灌装要求,否则,容易存在灌装溢满的情况或者灌装不足的情况发生。然而,目前的瓶体高度检测机制精度不足,且缺乏相应的后续处理机制,导致灌装溢满的情况或者灌装不足的情况时有发生。
技术实现要素:
4.为了解决现有技术中的技术问题,本发明提供了一种工位采集画面定制处理平台,能够采用定制的多处理部件构成的图像识别机制对待灌装饮料瓶体的高度执行高精度检测,并将检测到的高度与设定高度进行比较,以对存在高度偏差的瓶体执行自动化报警操作和剔除操作。
5.为此,本发明至少需要具备以下两处关键的发明点:
6.(1)对当前通过皮带传送机构的检测工位的最新待灌装饮料瓶体的瓶体高度执行针对性的图像识别操作,以获得高精度的瓶体高度数值;
7.(2)在图像识别到的瓶体高度与设定瓶体高度之差超过允许高度误差时,执行与瓶体高度偏差对应的高度警示动作,并在灌装工位之前完成对存在高度偏差的待灌装饮料瓶体的剔除动作。
8.根据本发明的一方面,提供了一种工位采集画面定制处理平台,所述平台包括:
9.皮带传送机构,用于传送均匀间隔布置的多瓶待灌装饮料瓶体且所述多瓶待灌装饮料瓶体陆续经过检测工位和灌装工位,所述检测工位被设置在所述灌装工位的前方。
10.更具体地,在所述工位采集画面定制处理平台中,所述平台还包括:
11.距离检测机构,与所述皮带传送机构连接,用于在所述皮带传送机构每前进设定
距离,发送一次方波信号,所述设定距离为两两相邻的两瓶待灌装饮料瓶体之间的间距。
12.更具体地,在所述工位采集画面定制处理平台中,所述平台还包括:
13.指令解析机构,与所述距离检测机构连接,用于在每接收到一次方波信号的上升沿时,发出一次采集执行指令。
14.更具体地,在所述工位采集画面定制处理平台中,所述平台还包括:
15.高度警示机构,用于在接收到的实体瓶体高度与设定瓶体高度之差超过允许高度误差时,执行与瓶体高度偏差对应的高度警示动作;
16.ccd采集器件,设置在所述检测工位的侧面位置,与所述指令解析机构电性连接,用于在每接收到一次采集执行指令,实现对所述检测工位被传送到的最新待灌装饮料瓶体的现场图像数据采集,以获得对应的现场采集画面;
17.前级操作器件,设置在所述检测工位附近的控制箱内,与所述ccd采集器件连接,用于对接收到的现场采集画面执行平滑线性滤波操作,以获得对应的前级操作画面;
18.中级操作器件,设置在所述控制箱内,与所述前级操作器件连接,用于对接收到的前级操作画面执行盒式滤波操作,以获得对应的中级操作画面;
19.末级操作器件,与所述中级操作器件连接,用于对接收到的中级操作画面执行利用对数变换的图像数据增强操作,以获得对应的末级操作画面;
20.对象鉴别机构,与所述末级操作器件连接,用于基于待灌装饮料瓶体的外形特征识别所述末级操作画面中的一个以上的瓶体鉴别分块;
21.分块筛选机构,与所述对象鉴别机构连接,用于将所述末级操作画面中的一个以上的瓶体鉴别分块内最靠近所述末级操作画面中央区域的瓶体鉴别分块作为有效鉴别分块输出;
22.行数分析器件,与所述分块筛选机构连接,用于识别所述有效鉴别分块占据所述末级操作画面的像素行的总数以作为当前识别行数输出;
23.高度提取器件,分别与所述高度警示机构和所述行数分析器件连接,用于确定与所述当前识别行数正向关联的瓶体高度以作为所述检测工位被传送到的最新待灌装饮料瓶体的实体瓶体高度输出;
24.其中,识别所述有效鉴别分块占据所述末级操作画面的像素行的总数以作为当前识别行数输出包括:获取构成所述有效鉴别分块的各个像素点,并基于所述各个像素点在所述末级操作画面中的位置确定所述有效鉴别分块占据所述末级操作画面的像素行的总数。
25.根据本发明的另一方面,还提供了一种工位采集画面定制处理方法,所述方法包括使用如上述的工位采集画面定制处理平台以采用针对性的图像识别机制对工位采集画面执行图像识别操作以确定并提出存在高度偏差的待灌装饮料瓶体。
附图说明
26.以下将结合附图对本发明的实施方案进行描述,其中:
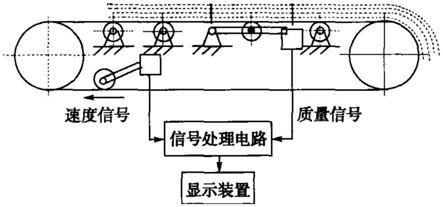
27.图1为根据本发明实施方案示出的工位采集画面定制处理平台的皮带传送机构的内部结构图。
具体实施方式
28.下面将参照附图对本发明的工位采集画面定制处理平台的实施方案进行详细说明。
29.图像识别是人工智能的一个重要领域。为了编制模拟人类图像识别活动的计算机程序,人们提出了不同的图像识别模型。例如模板匹配模型。这种模型认为,识别某个图像,必须在过去的经验中有这个图像的记忆模式,又叫模板。当前的刺激如果能与大脑中的模板相匹配,这个图像也就被识别了。例如有一个字母a,如果在脑中有个a模板,字母a的大小、方位、形状都与这个a模板完全一致,字母a就被识别了。这个模型简单明了,也容易得到实际应用。但这种模型强调图像必须与脑中的模板完全符合才能加以识别,而事实上人不仅能识别与脑中的模板完全一致的图像,也能识别与模板不完全一致的图像。例如,人们不仅能识别某一个具体的字母a,也能识别印刷体的、手写体的、方向不正、大小不同的各种字母a。同时,人能识别的图像是大量的,如果所识别的每一个图像在脑中都有一个相应的模板,也是不可能的。
30.目前,在采用皮带传送机构完成对待灌装饮料瓶体的灌装操作之前,需要对待灌装饮料瓶体的高度进行检测,以辨别其高度是否满足灌装要求,否则,容易存在灌装溢满的情况或者灌装不足的情况发生。然而,目前的瓶体高度检测机制精度不足,且缺乏相应的后续处理机制,导致灌装溢满的情况或者灌装不足的情况时有发生。
31.为了克服上述不足,本发明搭建了一种工位采集画面定制处理平台,能够有效解决相应的技术问题。
32.根据本发明实施方案示出的工位采集画面定制处理平台包括:
33.皮带传送机构,如图1所示,用于传送均匀间隔布置的多瓶待灌装饮料瓶体且所述多瓶待灌装饮料瓶体陆续经过检测工位和灌装工位,所述检测工位被设置在所述灌装工位的前方。
34.接着,继续对本发明的工位采集画面定制处理平台的具体结构进行进一步的说明。
35.所述工位采集画面定制处理平台中还可以包括:
36.距离检测机构,与所述皮带传送机构连接,用于在所述皮带传送机构每前进设定距离,发送一次方波信号,所述设定距离为两两相邻的两瓶待灌装饮料瓶体之间的间距。
37.所述工位采集画面定制处理平台中还可以包括:
38.指令解析机构,与所述距离检测机构连接,用于在每接收到一次方波信号的上升沿时,发出一次采集执行指令。
39.所述工位采集画面定制处理平台中还可以包括:
40.高度警示机构,用于在接收到的实体瓶体高度与设定瓶体高度之差超过允许高度误差时,执行与瓶体高度偏差对应的高度警示动作;
41.ccd采集器件,设置在所述检测工位的侧面位置,与所述指令解析机构电性连接,用于在每接收到一次采集执行指令,实现对所述检测工位被传送到的最新待灌装饮料瓶体的现场图像数据采集,以获得对应的现场采集画面;
42.前级操作器件,设置在所述检测工位附近的控制箱内,与所述ccd采集器件连接,用于对接收到的现场采集画面执行平滑线性滤波操作,以获得对应的前级操作画面;
43.中级操作器件,设置在所述控制箱内,与所述前级操作器件连接,用于对接收到的前级操作画面执行盒式滤波操作,以获得对应的中级操作画面;
44.末级操作器件,与所述中级操作器件连接,用于对接收到的中级操作画面执行利用对数变换的图像数据增强操作,以获得对应的末级操作画面;
45.对象鉴别机构,与所述末级操作器件连接,用于基于待灌装饮料瓶体的外形特征识别所述末级操作画面中的一个以上的瓶体鉴别分块;
46.分块筛选机构,与所述对象鉴别机构连接,用于将所述末级操作画面中的一个以上的瓶体鉴别分块内最靠近所述末级操作画面中央区域的瓶体鉴别分块作为有效鉴别分块输出;
47.行数分析器件,与所述分块筛选机构连接,用于识别所述有效鉴别分块占据所述末级操作画面的像素行的总数以作为当前识别行数输出;
48.高度提取器件,分别与所述高度警示机构和所述行数分析器件连接,用于确定与所述当前识别行数正向关联的瓶体高度以作为所述检测工位被传送到的最新待灌装饮料瓶体的实体瓶体高度输出;
49.其中,识别所述有效鉴别分块占据所述末级操作画面的像素行的总数以作为当前识别行数输出包括:获取构成所述有效鉴别分块的各个像素点,并基于所述各个像素点在所述末级操作画面中的位置确定所述有效鉴别分块占据所述末级操作画面的像素行的总数。
50.在所述工位采集画面定制处理平台中:
51.获取构成所述有效鉴别分块的各个像素点,并基于所述各个像素点在所述末级操作画面中的位置确定所述有效鉴别分块占据所述末级操作画面的像素行的总数包括:所述有效鉴别分块占据所述末级操作画面的每一像素行包括构成所述有效鉴别分块的一个以上像素点。
52.在所述工位采集画面定制处理平台中:
53.所述ccd采集器件还用于在每完成一次现场采集画面的采集操作之后,等待下一次采集执行指令的到达。
54.在所述工位采集画面定制处理平台中:
55.所述ccd采集器件还用于在每完成一次现场采集画面的采集操作之后,等待下一次采集执行指令的到达包括:所述ccd采集器件还用于在每完成一次现场采集画面的采集操作之后,不执行现场采集画面的采集操作,直到下一次采集执行指令到达。
56.在所述工位采集画面定制处理平台中,所述平台还包括:
57.灌装执行器件,设置在所述灌装工位的上方,用于对所述灌装工位被传送到的最新待灌装饮料瓶体执行饮料灌装动作。
58.在所述工位采集画面定制处理平台中,所述平台还包括:
59.瓶体剔除器件,设置在所述灌装工位和所述检测工位之间,用于执行对存在瓶体高度偏差的最新待灌装饮料瓶体的剔除动作。
60.同时,为了克服上述不足,本发明还搭建了一种工位采集画面定制处理方法,所述方法包括使用如上述的工位采集画面定制处理平台以采用针对性的图像识别机制对工位采集画面执行图像识别操作以确定并提出存在高度偏差的待灌装饮料瓶体。
61.另外,在所述工位采集画面定制处理平台中,ccd采集器件,设置在所述检测工位处,与所述指令解析机构电性连接,用于在每接收到一次采集执行指令,实现对所述检测工位被传送到的最新待灌装饮料瓶体的现场图像数据采集,以获得对应的现场采集画面包括:所述ccd采集器件包括滤光片、ccd传感器、光学元件、支撑架体以及动作触发元件,所述动作触发元件分别与所述指令解析机构以及所述ccd传感器连接。
62.采用本发明的工位采集画面定制处理平台,针对现有技术中饮料瓶灌装存在灌装过度或者灌装不足的技术问题,通过采用定制的多处理部件构成的图像识别机制对待灌装饮料瓶体的高度执行高精度检测,并将检测到的高度与设定高度进行比较,以对存在高度偏差的瓶体执行自动化报警操作和剔除操作,从而避免灌装过度或者灌装不足的情况发生。
63.虽然已通过优选的实施方案描述了本发明,但本发明并不受限于所给出的特定的实施例,并且本领域技术人员在不背离本发明的精神和范围之下,可进行其它的实施方案和修饰。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1