一种保健代餐粉的加工系统及加工方法与流程
1.本发明涉及代餐粉技术领域,尤其涉及一种保健代餐粉的加工系统及加工方法。
背景技术:
2.代餐粉是一种配方食品,属于特殊膳食,具有高纤维、低热量、易有饱腹感的特性,同时还可以更严格地控制食量和热量摄入,因此食用代餐粉是目前比较风行的减肥瘦身方式,它既能集合多种营养成分,又能使人们吃过之后达到抑制饥饿的目的,完全可以替代正餐,从而达到减肥的目的,现有的代餐粉在生产时一般通过罐装密封进行包装,并且会在罐内冲入氮气以避免代餐粉和罐内的氧气发生反应,进而刚好的保存代餐粉,而在罐装包装过程中一般会产生以下问题:
3.1、在现有技术中,代餐粉进行罐装时,一般是通过在罐外设置较大的圆筒,然后通过圆筒将包装罐罩住,然后将圆筒内抽成真空,再向内冲入氮气,最后将金属盖扣压在包装罐上,完成包装,但是,通过向圆筒内通入氮气,使得圆筒打开时,多余的氮气就会跑掉,造成一定程度的浪费;
4.2、在现有技术中,代餐粉进行罐装时,一般在罐装前需要将金属盖盖在包装罐开口处,然后再抽出空气,在抽气时由于金属盖没有固定,使得罐内空气可以被抽出,但是在向真空腔内冲入氮气时,由于罐内为真空,使得罐外氮气压力比罐内压力大,会将金属盖压紧在包装罐口,进而使得氮气无法进入包装罐内。
技术实现要素:
5.本发明的目的在于提供一种保健代餐粉的加工系统,能够高效实现保健代餐粉的加工生产。
6.为实现上述目的,本发明提供如下技术方案:一种保健代餐粉的加工系统,包括底板,所述底板上设有机架,所述机架内沿竖直方向滑动连接有密封块,所述底板上在密封块的正下方设有自左向右传动的传送带,所述传送带用于将设有金属盖的包装罐送至密封块正下方,且在金属盖密封安装到包装罐后将包装罐向右送出;所述密封块内设有下端开口的安装腔,所述密封块的左侧设有与安装腔连通的第一接口和第二接口,所述第一接口用于与真空源连通将安装腔抽真空,所述第二接口用于与液氮源连通像安装腔内冲入氮气,所述安装腔的下端开口处设有密封组件,在密封块向下运动至下端位置时,所述密封组件套接在包装罐的圆周外侧;所述安装腔内设有加工组件,在将包装罐内抽真空并充氮气时,所述加工组件用于将金属盖提起,在将包装罐密封时,所述加工组件用于将金属盖密封安装到包装罐的上端。
7.进一步的,所述密封组件包括固定安装在安装腔下端开口处的环形气囊,所述机架内的左侧固定设有沿竖直方向设置的缸体,所述密封块的左侧固定设有下端伸入缸体内的活塞杆,所述活塞杆的下端设有滑动连接在缸体内的活塞体,所述缸体内在活塞体的下端形成与环形气囊连通的无杆腔;在密封块向下运动时,包装罐的上端穿过环形气囊进入
安装腔内,且无杆腔内的气体被挤压进入环形气囊内,使得环形气囊膨胀密封压紧在包装罐的外侧面上;在密封块向上运动时,无杆腔的体积增大,环形气囊内的气体进入无杆腔内,包装罐的上端由安装腔的下端开口脱离。
8.进一步的,所述机架的左侧沿竖直方向设有限位滑槽,所述密封块的左侧设有伸入限位滑槽内的凸杆,所述活塞杆的上端伸入凸杆内,所述凸杆内在活塞杆的外侧形成环槽,所述活塞体和活塞杆内设有用于连通无杆腔和环槽的第一通孔,所述凸杆内设有用于连通环槽和安装腔的第二通孔。
9.进一步的,所述加工组件包括第一滑块,所述第一滑块沿竖直方向滑动连接在安装腔内,所述第一滑块的上端设有向上伸出密封块的凸块;所述机架的上端固定设有两个第一电动推杆,两个第一电动推杆的下端之间固定设有第一横板,所述第一横板上固定设有第一电机,所述第一电机的输出轴竖直向下且与凸块的上端固定连接;
10.所述密封块的右侧臂沿左右方向滑动连接有定位轴,所述定位轴的左右两端均为球面,所述第一滑块的圆周外侧设有第一定位环槽,在第一滑块处于安装腔的上端位置时,所述第一定位环槽处于正对定位轴的位置,所述机架的右侧壁设有第二定位槽,在密封块处于上端位置时,所述定位轴的左端伸入第一定位环槽内,使得第一滑块和密封块沿竖直方向固定连接;在密封块处于下端位置时,随着第一滑块向下运动,所述定位轴向右运动,所述定位轴的左端脱离第一定位环槽且右端伸入第二定位槽内,使得密封块和机架固定连接;在密封块处于下端位置且第一滑块处于安装腔的上端位置时,随着第一滑块向上运动,所述定位轴的右端脱离第二定位槽且左端伸入第一定位环槽内,使得第一滑块和密封块沿竖直方向固定连接;
11.所述第一滑块的下端设有夹爪组件,所述夹爪组件用于抓取金属盖并将金属盖密封安装在包装罐的上端开口处。
12.进一步的,所述夹爪组件包括第二滑块,所述第一滑块内沿竖直方向设有下端开口的第一滑孔,所述第二滑块沿竖直方向滑动连接在第一滑孔内,所述第二滑块在靠近下端外侧壁对称设有铰接轴,每个铰接轴上均设有夹爪块,以及用于迫使夹爪块的上端压向第二滑块外侧壁的扭簧;所述第二滑块内固定设有第二电动推杆,所述第二电动推杆的伸缩端竖直向上且与第一滑孔的顶部固定连接,所述第二电动推杆伸出时,第二滑块由第一滑孔的下端向下伸出至下端位置,夹爪组件中的夹爪块处于张开位置,所述第二电动推杆收缩时,第二滑块由第一滑孔的下端向上缩入第一滑孔内,夹爪组件中的夹爪块处于闭合位置。
13.进一步的,所述夹爪块的上端靠近第二滑块外侧壁的一侧设有上斜面,所述第一滑块的下端外侧设有与上斜面配合的倒锥面,在第二滑块沿第一滑孔向上运动时,倒锥面与上斜面配合推动夹爪块翔闭合位置翻转;所述夹爪块的下端内侧设有钩部,所述钩部的内侧设有下斜面,所述钩部用于钩住金属盖向上提起,并在将金属盖密封安装在包装罐的上端时将金属盖的外侧向内翻边,所述下斜面用于向下按压金属盖的边缘。
14.进一步的,所述第一滑孔的内侧壁沿竖直方向设有内凹滑槽,所述第一滑块的上端外侧设有用于伸入内凹滑槽的限位凸起;所述第二滑块的上端和第一滑孔的上端之间设有用于迫使第二滑块向下运动的第一弹簧。
15.本发明还提供一种用上述保健代餐粉的加工系统加工保健代餐粉的方法,包括以
下步骤:
16.s1、首先通过人工将金属盖放置在装好代餐粉的包装罐上,并通过传送带将包装罐传送至密封块的正下方;
17.s2控制密封块向下运动使得金属盖和包装罐的上端由安装腔的下端开口进入安装腔内,与此同时控制密封组件环抱包装罐并形成密封;
18.s3、控制夹爪组件将金属盖提起,使得包装罐开口敞开,启动控制第一接口与真空源连通,将包装罐内的空气抽出形成真空;
19.s4、通过第二接口向包装罐内冲入氮气,当氮气充满后,控制夹爪组件将金属盖盖合到包装罐的开口上;
20.s5、控制加工组件将金属盖密封安装到包装罐的上端开口处;
21.s6、控制密封块向上运动,密封组件将包装罐松开,使得包装罐安装腔的下端开口脱离出来,接着控制传送带,将加工好的包装罐向右传动,通过人工进行下料收集,完成保健代餐粉的加工。
22.有益效果
23.与现有技术相比,本发明的技术方案具有以下优点:
24.1、本发明通过设置密封块,使得通过密封块和包装罐开口处进行密封,再将密封块和包装罐内的空气抽真空,最后向包装罐和密封块内通入氮气,由于密封块的体积较小,使得在氮气冲入包装罐后,密封块从包装罐上取下时,不会有很多的氮气跑掉,节省了氮气的使用量;
25.2、本发明通过在密封块上设置定位轴,并且在密封块的下端开口处设置环形气囊,使得在第一滑块下降时,通过定位轴带动密封块一同下降,同时密封块下降推动活塞体向下运动,将无杆腔内的空气推进环形气囊内,使得环形气囊膨胀,当活塞体运动至下端位置时,环形气囊和包装罐包住,使得密封块和包装罐形成密封,同时定位轴控制第一滑块和密封块分开,密封块和机架定位,使其位置不变,而第一滑块可以继续向下移动,完成其他动作,使得不用特意控制密封块就能完成安装密封,结构紧凑;
26.3、本发明通过在第二滑块上铰接夹爪块,并且通过扭簧带动夹爪块向两侧张开,第一滑块的下端设置倒锥面,倒锥面和夹爪块上的上斜面配合,能控制夹爪块向中间转动,第二电动推杆控制第二滑块和第一滑块之间的距离,可控制倒锥面和夹爪块配合,能控制夹爪块向中间转动的角度,使得在抽真空时,通过控制夹爪块转动,可以使得夹爪块上的钩部将金属盖提起,将包装罐开口处打开,然后进行氮气冲入,在氮气冲入后,在控制夹爪块将金属盖盖在包装罐开口处,最后,通过第一电机和第二电动推杆的配合,使得夹爪块转动,通过下斜面和钩部并将金属盖扣压在包装罐上,完成罐装包装,此过程中,氮气不会因为压力问题而不能进入包装罐中,保证了代餐粉的包装质量。
附图说明
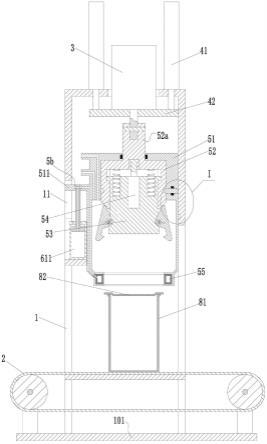
27.图1为本发明的剖视图;
28.图2为本发明密封块和包装罐形成密封时的剖视图;
29.图3为本发明图1中i处放大图;
30.图4为本发明图2中ii处放大图;
31.图5为本发明夹爪块将金属盖提起时图2中ii处放大图;
32.图6为本发明夹爪块进行扣压前图2中ii处放大图;
33.图7为本发明夹爪块将金属盖扣压在包装罐上后图2中ii处放大图。
具体实施方式
34.请参阅图1-7所示,一种保健代餐粉的加工系统,包括底板101,所述底板101上设有机架1,所述机架1内沿竖直方向滑动连接有密封块51,所述底板101上在密封块51的正下方设有自左向右传动的传送带2,所述传送带2用于将设有金属盖82的包装罐81送至密封块51正下方,且在金属盖82密封安装到包装罐81后将包装罐81向右送出;所述密封块51内设有下端开口的安装腔5a,所述密封块51的左侧设有与安装腔5a连通的第一接口512和第二接口513,所述第一接口512用于与真空源连通将安装腔5a抽真空,所述第二接口513用于与液氮源连通像安装腔5a内冲入氮气,所述安装腔5a的下端开口处设有密封组件,在密封块51向下运动至下端位置时,所述密封组件套接在包装罐81的圆周外侧;所述安装腔5a内设有加工组件,在将包装罐内抽真空并充氮气时,所述加工组件用于将金属盖提起,在将包装罐81密封时,所述加工组件用于将金属盖82密封安装到包装罐81的上端。
35.所述密封组件包括固定安装在安装腔5a下端开口处的环形气囊55,所述机架1内的左侧固定设有沿竖直方向设置的缸体61,所述密封块51的左侧固定设有下端伸入缸体61内的活塞杆6a,所述活塞杆6a的下端设有滑动连接在缸体61内的活塞体62,所述缸体61内在活塞体62的下端形成与环形气囊55连通的无杆腔611;在密封块51向下运动时,包装罐81的上端穿过环形气囊55进入安装腔5a内,且无杆腔611内的气体被挤压进入环形气囊55内,使得环形气囊55膨胀密封压紧在包装罐81的外侧面上;在密封块51向上运动时,无杆腔611的体积增大,环形气囊55内的气体进入无杆腔611内,包装罐81的上端由安装腔5a的下端开口脱离。
36.所述机架1的左侧沿竖直方向设有限位滑槽11,所述密封块51的左侧设有伸入限位滑槽11内的凸杆511,所述活塞杆6a的上端伸入凸杆511内,所述凸杆511内在活塞杆6a的外侧形成环槽5b,所述活塞体62和活塞杆6a内设有用于连通无杆腔611和环槽5b的第一通孔621,所述凸杆511内设有用于连通环槽5b和安装腔5a的第二通孔514。
37.所述加工组件包括第一滑块52,所述第一滑块52沿竖直方向滑动连接在安装腔5a内,所述第一滑块52的上端设有向上伸出密封块51的凸块52a;所述机架1的上端固定设有两个第一电动推杆41,两个第一电动推杆41的下端之间固定设有第一横板42,所述第一横板42上固定设有第一电机3,所述第一电机3的输出轴竖直向下且与凸块52a的上端固定连接;所述密封块51的右侧臂沿左右方向滑动连接有定位轴515,所述定位轴515的左右两端均为球面,所述第一滑块52的圆周外侧设有第一定位环槽522,在第一滑块52处于安装腔5a的上端位置时,所述第一定位环槽522处于正对定位轴515的位置,所述机架1的右侧壁设有第二定位槽12,在密封块51处于上端位置时,所述定位轴515的左端伸入第一定位环槽522内,使得第一滑块52和密封块51沿竖直方向固定连接;在密封块51处于下端位置时,随着第一滑块52向下运动,所述定位轴515向右运动,所述定位轴515的左端脱离第一定位环槽522且右端伸入第二定位槽12内,使得密封块51和机架1固定连接;在密封块51处于下端位置且第一滑块52处于安装腔5a的上端位置时,随着第一滑块52向上运动,所述定位轴515的右端
脱离第二定位槽12且左端伸入第一定位环槽522内,使得第一滑块52和密封块51沿竖直方向固定连接;所述第一滑块52的下端设有夹爪组件,所述夹爪组件用于抓取金属盖82并将金属盖82密封安装在包装罐81的上端开口处。
38.所述夹爪组件包括第二滑块53,所述第一滑块52内沿竖直方向设有下端开口的第一滑孔52b,所述第二滑块53沿竖直方向滑动连接在第一滑孔52b内,所述第一滑孔52b的内侧壁沿竖直方向设有内凹滑槽521,所述第一滑块52的上端外侧设有用于伸入内凹滑槽521的限位凸起531;所述第二滑块53的上端和第一滑孔52b的上端之间设有用于迫使第二滑块53向下运动的第一弹簧56;所述第二滑块53在靠近下端外侧壁对称设有铰接轴7a,每个铰接轴7a上均设有夹爪块71,以及用于迫使夹爪块71的上端压向第二滑块53外侧壁的扭簧72;所述第二滑块53内固定设有第二电动推杆54,所述第二电动推杆54的伸缩端竖直向上且与第一滑孔52b的顶部固定连接,所述第二电动推杆54伸出时,第二滑块53由第一滑孔52b的下端向下伸出至下端位置,夹爪组件中的夹爪块71处于张开位置,所述第二电动推杆54收缩时,第二滑块53由第一滑孔52b的下端向上缩入第一滑孔52b内,夹爪组件中的夹爪块71处于闭合位置。
39.所述夹爪块71的上端靠近第二滑块53外侧壁的一侧设有上斜面71a,所述第一滑块52的下端外侧设有与上斜面71a配合的倒锥面523,在第二滑块53沿第一滑孔52b向上运动时,倒锥面523与上斜面71a配合推动夹爪块71翔闭合位置翻转;所述夹爪块71的下端内侧设有钩部71b,所述钩部71b的内侧设有下斜面711,所述钩部71b用于钩住金属盖82向上提起,并在将金属盖82密封安装在包装罐81的上端时将金属盖82的外侧向内翻边,所述下斜面711用于向下按压金属盖82的边缘。
40.本发明还提供一种用上述保健代餐粉的加工系统加工保健代餐粉的方法,包括以下步骤:
41.s1、首先通过人工将金属盖放置在装好代餐粉的包装罐上,并通过传送带2将包装罐传送至密封块51的正下方;
42.s2控制密封块51向下运动使得金属盖和包装罐的上端由安装腔5a的下端开口进入安装腔5a内,与此同时控制密封组件环抱包装罐并形成密封;
43.s3、控制夹爪组件将金属盖提起,使得包装罐开口敞开,启动控制第一接口512与真空源连通,将包装罐内的空气抽出形成真空;
44.s4、通过第二接口513向包装罐内冲入氮气,当氮气充满后,控制夹爪组件将金属盖盖合到包装罐的开口上;
45.s5、控制加工组件将金属盖密封安装到包装罐的上端开口处;
46.s6、控制密封块51向上运动,密封组件将包装罐松开,使得包装罐安装腔5a的下端开口脱离出来,接着控制传送带2,将加工好的包装罐向右传动,通过人工进行下料收集,完成保健代餐粉的加工。
47.本实施例的上述s2中,密封块51向下运动时,控制第一电动推杆41伸出,推动第一横板42下降,第一电机3安装在第一横板42上,第一滑块52固定安装在第一电机3的转轴上,由于此时定位轴515一端伸入第一定位环槽522内,另一端顶在机架1的侧壁上,使得第一滑块52和密封块51定位在一起,使得密封块51跟随下降(如图1所示),由于密封块51和活塞杆6a固定连接,使得活塞杆6a带动活塞体62跟随下降,收缩至缸体61内,使得无杆腔611收缩,
无杆腔611内的空气,通过第一通孔621、环槽5b、第二通孔514进入环形气囊55内,使其膨胀,当活塞杆6a带动活塞体62下降至最低时,无杆腔611内的空气全部进入环形气囊55内,使得环形气囊55膨胀挤压包装罐81,形成密封,而此时定位轴515下降至与第二定位槽12正对位置,第一滑块52继续下降,使得定位轴515退出第一定位环槽522进入第二定位槽12中,使得密封块51和机架1定位,完成密封盖的安装。
48.本实施例的上述s3中,在控制金属盖向上提起时,控制第一电动推杆41继续伸出,此时夹爪块71在扭簧72作用下处于完全张开的状态(如图2、4所示),随着第一电动推杆41伸出,带动夹爪块71头部移动至金属盖82下方,然后控制第二电动推杆54收缩,克服第一弹簧56带动第二滑块53向上移动,通过倒锥面523和上斜面71a的作用,推动夹爪块71克服扭簧72向内翻转收缩,使得夹爪块71的钩部71b深入到金属盖82下端,控制第一电动推杆41收缩,带动夹爪块71上升,进而将金属盖82提起,使得包装罐81开口敞开。
49.本实施例的上述s4中,将金属盖82放置到包装罐81上端时,控制第二电动推杆54伸出,在第一弹簧56作用下第二滑块53下降,夹爪块71在扭簧72作用下张开,使得金属盖82落在包装罐81开口上。
50.本实施例的上述s5中,在将金属盖密封安装到包装罐的上端时,控制第二电动推杆54收缩,带动第二滑块53上升,在倒锥面523和上斜面71a的作用下推动夹爪块71向中间翻转收缩,使得夹爪块71的钩部71b收缩至如图6所示位置,启动第一电机3带动第一滑块52转动,由于限位凸起531在内凹滑槽521内滑动,使得第二滑块53跟随转动,进而使得夹爪块71跟随转动,控制第一电动推杆41伸出,在旋转和下斜面711作用下,使得夹爪块71推动金属盖82边缘变形,包裹在包装罐81开口处,在第二滑块53和金属盖82触碰时,第一电动推杆41继续伸出,克服第一弹簧56推动第一滑块52下降,进而通过倒锥面523与上斜面71a配合推动夹爪块71向内转动,进而使得夹爪块71的钩部71b将金属盖82边缘扣压在包装罐81开口处(如图7所示),完成扣压。
51.本实施例的上述s6中,在控制包装罐下料时,控制第二电动推杆54伸出,并且控制第一电动推杆41收缩,带动夹爪块71张开后上升,脱离包装罐81,当第一滑块52上方和密封块51接触时,第一定位环槽522进而与定位轴515对齐,定位轴515从第二定位槽12中退出进入第一定位环槽522中,密封块51向上移动,通过活塞杆6a带动活塞体62上升,由于环形气囊55弹性作用,使得空气从环形气囊55内进入无杆腔611内,环形气囊55收缩,与包装罐81解除密封,当密封块51上升,使得包装罐81从密封块51中脱离出来时,控制传送带2工作,将加工好的包装罐81向右传动,通过人工进行下料收集,完成保健代餐粉的加工。
52.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1