蛇形无人机及水管泄露检测装置的制作方法
1.本实用新型涉及水管检测技术领域,具体地,涉及蛇形无人机及水管泄露检测装置。
背景技术:
2.水管泄漏检测设备是一种检测水管泄露的工具,包括听漏棒,管道测漏仪,其原理是“管道内流水在压力作用下从漏点喷出时冲击内壁产生的噪声沿管道传播,或沿埋层介质传播到地面,通过传感器放大漏水噪声确定漏水点”。用检测仪器的传感器在管道路面上方进行检测,达到找到漏点的目的。
3.但传统的检测仪的位置相对漏点较远,而泄漏点的声音大小不一,导致检测范围较小与检测不到漏点,难以做到全面有效的检测。
4.专利文献cn204083824u公开了一种掩埋式水管泄漏自动检测装置,包括埋设于漏水检测区内的泄漏测头和与泄漏测头相接的泄漏检测电路,泄漏测头为对所布设位置处的掩埋体湿度进行检测的湿度检测测头;泄漏测头包括两根呈平行布设且外侧均包覆有绝缘层的导线,两根导线分别为第一导线和第二导线,第一导线上由前至后布设有多个第一导电点,第二导线上由前至后布设有多个第二导电点;多个第一导电点和多个第二导电点呈交错布设;泄漏检测电路为对第一导线和第二导线之间的电阻阻值进行检测的电阻值检测电路。
5.专利文献cn107795857b公开了一种地下管道泄漏监测方法及监测装置,包括信号采集带、多个探点、数据终端和上位机;所述信号采集带附着在地下管道的外壁上或邻近地下管道布设,且沿地下管道的延伸方向延伸;所述多个探点沿地下管道的延伸方向间隔布设在所述信号采集带上,用于采集土壤的电阻率;所述数据终端连接所述信号采集带,通过信号采集带接收所述多个探点采集到的土壤电阻率并发送至上位机,通过上位机计算并判定地下管道是否出现泄漏事故,并对泄漏点进行定位。
6.上述现有专利都是通过电阻率来检测水管的泄露位置,检测时其离漏点位置较远,检测精度低,范围小。
技术实现要素:
7.针对现有技术中的缺陷,本实用新型的目的是提供一种蛇形无人机及水管泄露检测装置。
8.根据本实用新型提供的一种蛇形无人机,可用于水管泄露检测装置,包括:头仓、主板仓、电池仓以及尾仓;
9.所述头仓、所述主板仓、所述电池仓以及所述尾仓依次连接;
10.所述头仓和尾仓上安装螺旋桨装置,所述主板仓内部安装主板、水下扬声器以及惯性传感器,所述主板仓周侧安装水听器,所述螺旋桨装置、所述水听器、所述水下扬声器以及所述惯性传感器连接所述主板;
11.所述主板通过所述水听器和所述水下扬声器声波信号连接控制台。
12.优选地,所述螺旋桨装置包括:第一上下推力螺旋桨、第一左右推力螺旋桨、第一前后推力螺旋桨、第二上下推力螺旋桨、第二前后推力螺旋桨以及第二左右推力螺旋桨;
13.所述头仓上下两侧安装所述第一上下推力螺旋桨,上下两侧所述第一上下推力螺旋桨沿竖直方向对称,所述第一上下推力螺旋桨推力方向沿所述头仓竖直方向;
14.所述头仓左右两侧安装所述第一左右推力螺旋桨,左右两侧所述第一左右推力螺旋桨沿水平方向对称,所述第一左右推力螺旋桨推力方向沿所述头仓左右方向;
15.所述头仓左右两侧安装所述第一前后推力螺旋桨,左右两侧所述第一前后推力螺旋桨沿水平方向对称,所述第一前后推力螺旋桨推力方向沿所述头仓轴向方向;
16.所述尾仓上下两侧安装所述第二上下推力螺旋桨,上下两侧所述第二上下推力螺旋桨沿竖直方向对称,所述第二上下推力螺旋桨推力方向沿所述尾仓竖直方向;
17.所述尾仓左右两侧安装所述第二左右推力螺旋桨,左右两侧所述第二左右推力螺旋桨沿水平方向对称,所述第二左右推力螺旋桨推力方向沿所述尾仓左右方向;
18.所述尾仓左右两侧安装所述第二前后推力螺旋桨,左右两侧所述第二前后推力螺旋桨沿水平方向对称,所述第二前后推力螺旋桨推力方向沿所述尾仓轴向方向。
19.优选地,所述第一上下推力螺旋桨、所述第一左右推力螺旋桨、所述第一前后推力螺旋桨、所述第二上下推力螺旋桨、所述第二前后推力螺旋桨以及所述第二左右推力螺旋桨均安装有桨叶;
20.对称安置的所述桨叶设置为旋转方向相反。
21.优选地,所述头仓包括:第一摄像头、第一深度计以及led灯;
22.所述头仓背向所述主板仓一侧安装所述第一摄像头和多个led灯,所述头仓安装所述第一深度计,所述第一摄像头和所述第一深度计连接所述主板。
23.优选地,所述尾仓还包括:第二摄像头、第二深度计以及led灯;
24.所述尾仓背向所述主板仓一侧安装所述第二摄像头和多个led灯,所述尾仓安装所述第二深度计,所述第二摄像头和所述第二深度计连接所述主板。
25.优选地,所述主板仓还包括:充电口和里程计;
26.所述主板仓周侧安装所述充电口和所述里程计,所述充电口和所述里程计连接所述主板;
27.所述主板仓外侧通过主板仓上半壳体和主板仓下半壳体合围形成。
28.优选地,所述电池仓两端安装金属扎带;
29.所述电池仓外侧通过电池仓上半壳体和电池仓下半壳体合围形成,所述电池仓上半壳体和所述电池仓下半壳体之间设置壳体间凹槽。
30.优选地,所述控制台包括:控制台天线和控制台触摸屏;
31.所述控制台上设置所述控制台触摸屏,所述控制台触摸屏侧面安装多个所述控制台天线。
32.优选地,相邻的所述头仓、所述主板仓、所述电池仓以及所述尾仓之间安装防水橡胶圈。
33.与现有技术相比,本实用新型具有如下的有益效果:
34.1、本装置通过将机器人各舱室依次相连实现蛇形结构,可以直接进入管道内部,
从而接近水管泄露位置进行检测,检测精度高;
35.2、本装置通过螺旋桨装置实现蛇形无人机的移动;
36.3、本装置通过在蛇形无人机上安装水听器和水下扬声器实现蛇形无人机的声波信号传输;
37.4、本装置通过在蛇形无人机上安装水听器(123)实现水管泄露点的声波检测,通过过在蛇形无人机上安装摄像头配合led灯实现光学检测。
附图说明
38.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
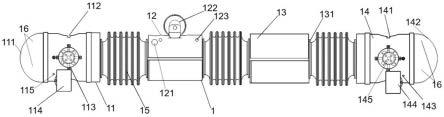
39.图1为蛇形无人机结构示意图;
40.图2为控制台结构示意图;
41.图3为主板仓剖视图;
42.图4为主板仓上半壳体结构示意图;
43.图5为主板仓下半壳体结构示意图;
44.图6为电池仓上半壳体结构示意图;
45.图7为电池仓下半壳体结构示意图。
46.图中所示:
47.具体实施方式
48.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
49.实施例1
50.如图1和图3所示,本实施例提供一种用于水管泄露点检测的蛇形无人机1,包括:头仓11、主板仓12、电池仓13以及尾仓14;
51.头仓11、主板仓12、电池仓13以及尾仓14依次连接,相邻的头仓11、主板仓12、电池仓13以及尾仓14之间安装防水橡胶圈15。头仓11和尾仓14上安装螺旋桨装置,主板仓12内部安装主板126、水下扬声器124以及惯性传感器125,主板仓12周侧安装水听器123,螺旋桨装置、水听器123、水下扬声器124以及惯性传感器125连接主板126,主板126通过水听器123和水下扬声器124声波信号连接控制台2。主板仓12还包括:充电口121和里程计122;主板仓12周侧安装充电口121和里程计122,充电口121和里程计122连接主板126。头仓11还包括:第一摄像头111、第一深度计115以及led灯16;头仓11背向主板仓12一侧安装第一摄像头111和多个led灯16,头仓11安装第一深度计115,第一摄像头111和第一深度计115连接主板126。尾仓14还包括:第二摄像头142、第二深度计143以及led灯16;尾仓14背向主板仓12一侧安装第二摄像头142和多个led灯16,尾仓14安装第二深度计143,第二摄像头142和第二深度计143连接主板126。电池仓13内安装电池,为蛇形无人机1提供电能。
52.螺旋桨装置包括:第一上下推力螺旋桨112、第一左右推力螺旋桨113、第一前后推力螺旋桨114、第二上下推力螺旋桨141、第二前后推力螺旋桨144以及第二左右推力螺旋桨145;头仓11上下两侧安装第一上下推力螺旋桨112,上下两侧第一上下推力螺旋桨112沿竖直方向对称,第一上下推力螺旋桨112推力方向沿头仓11竖直方向,头仓11左右两侧安装第一左右推力螺旋桨113,左右两侧第一左右推力螺旋桨113沿水平方向对称,第一左右推力螺旋桨113推力方向沿头仓11左右方向,头仓11左右两侧安装第一前后推力螺旋桨114,左右两侧第一前后推力螺旋桨114沿水平方向对称,第一前后推力螺旋桨114推力方向沿头仓11轴向方向,尾仓14上下两侧安装第二上下推力螺旋桨141,上下两侧第二上下推力螺旋桨141沿竖直方向对称,第二上下推力螺旋桨141推力方向沿尾仓14竖直方向,尾仓14左右两侧安装第二左右推力螺旋桨145,左右两侧第二左右推力螺旋桨145沿水平方向对称,第二左右推力螺旋桨145推力方向沿尾仓14左右方向,尾仓14左右两侧安装第二前后推力螺旋桨144,左右两侧第二前后推力螺旋桨144沿水平方向对称,第二前后推力螺旋桨144推力方向沿尾仓14轴向方向。第一上下推力螺旋桨112、第一左右推力螺旋桨113、第一前后推力螺旋桨114、第二上下推力螺旋桨141、第二前后推力螺旋桨144以及第二左右推力螺旋桨145均安装有桨叶,对称安置的桨叶设置为旋转方向相反。
53.结合图4至图7所示,电池仓13两端安装金属扎带131;电池仓13外侧通过电池仓上半壳体132和电池仓下半壳体134合围形成,电池仓上半壳体132和电池仓下半壳体134之间设置壳体间凹槽133。主板仓12外侧通过主板仓上半壳体128和主板仓下半壳体127合围形成。
54.如图2所示,控制台2包括:控制台天线21和控制台触摸屏22;控制台2上设置控制
台触摸屏22,控制台触摸屏22侧面安装多个控制台天线21。
55.工作原理:
56.主板126与控制台2:主板126通过水听器123配合水下扬声器124,以声波通信的方式,将信息传递给控制台2,并接受控制台2传递过来的指令信号。
57.第一摄像头111、第二摄像头142:用于配合led灯16的光照,对水下环境进行拍摄后传递给主板126。
58.第一深度计115、第二深度计143:市面上已有的测量深度的仪器,用于蛇形无人机1深度位置的测量,并将测量信息传递给主板126。
59.充电口121:用于蛇形无人机1的充电接口。
60.里程计122:市面上已有的行程测量装置,用于测量蛇形无人机1行程的装置,并将行程信息传递给主板126。
61.水听器123:市面上已有的用来接收水中的声信号的仪器,水听器123广泛用于水中水下的探测、识别、通信,以及海洋环境监测,在本实施例中,水听器123用来接受控制台2传递过来的声波信号并传递给主板126,同时,水听器123还用来对水管泄漏点进行声波探测。
62.水下扬声器124:市面上已有的在水中传播声波信号的装置,也可以在空气中传播,故用来向控制台2传递主板126的信号。
63.惯性传感器125:是市面上已有的检测和测量加速度、倾斜、冲击、振动、旋转和多自由度(dof)运动的传感装置,是解决导航、定向和运动载体控制的重要装置,其本身的特性可用作蛇形无人机1的导航装置。
64.防水橡胶圈15:用于各舱室之间的柔性防水连接,不会干涉各舱室之间的相互运动,从而形成类似蛇形移动的移动方式。
65.螺旋桨装置:通过多个螺旋桨推动蛇形无人机1的移动;其中,第一上下推力螺旋桨112和第二上下推力螺旋桨141的推力方向是上下方向,因此实现蛇形无人机1的上下移动;第一左右推力螺旋桨113和第二左右推力螺旋桨145的推力方向是左右方向,因此实现蛇形无人机1的左右移动;第一前后推力螺旋桨114和第二前后推力螺旋桨144的推力方向是前后方向,因此实现蛇形无人机1的前后移动。此外,由于螺旋桨装置是连接主板126的,具体各螺旋桨哪个工作,哪个断开,由主板126收到的控制台2的信号决定,配合惯性传感器125从而实现蛇形无人机1的导向移动。
66.实施例2
67.实施例2作为实施例1的优选例。
68.本实施例包括蛇形无人机1和控制台2;蛇形无人机1中的第一摄像头111、第二摄像头142、第一深度计115、第二深度计143、9轴的惯性传感器125以及里程计122分别与控制台2声波连接;第一摄像头111和第二摄像头142:识别管道障碍物,识别行驶管道方向。里程计122:用于测量管道机器人沿管道中轴线行进的路程信息,并将测量的路程信息传输给控制台2,控制台2结合路程信息,确认此时蛇形无人机1的位置。
69.蛇形无人机1包括:头仓11、主板仓12、电池仓13以及尾仓14;头仓11包括:第一摄像头111、第一上下推力螺旋桨112、第一左右推力螺旋桨113、第一前后推力螺旋桨114以及第一深度计115;尾仓14包括:第二上下推力螺旋桨141、第二摄像头142、第二深度计143、第
二前后推力螺旋桨144以及第二左右推力螺旋桨145;主板仓12包括:充电口121、里程计122、水听器123、水下扬声器124、主板126以及惯性传感器125;电池仓13包括金属扎带131。
70.第一摄像头111和第二摄像头142分别在蛇形无人机1前后方,防水橡胶圈15部分可以自由360度旋转,里程计122位于上方。第一上下推力螺旋桨112的2个桨叶互为正反桨叶,同时转动可以抵消旋转反作用力,排列方式是上下对称;第二上下推力螺旋桨141的2个桨叶互为正反桨叶,同时转动可以抵消旋转反作用力,排列方式是上下对称;第一左右推力螺旋桨113的2个桨叶互为正反桨叶,同时转动可以抵消旋转反作用力,排列方式是左右水平对称放置,第二左右推力螺旋桨145的2个桨叶互为正反桨叶,同时转动可以抵消旋转反作用力,排列方式是左右水平对称放置;第一前后推力螺旋桨114的2个桨叶互为正反桨叶,同时转动可以抵消旋转反作用力,可以控制前后移动,排列方式是左右水平对称放置,第二前后推力螺旋桨144的2个桨叶互为正反桨叶,同时转动可以抵消旋转反作用力,可以控制前后移动,排列方式是左右水平对称放置。
71.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
72.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1