用于进行封盖测试的自动化系统的制作方法
本发明涉及一种用于执行封盖测试的自动化系统。更具体地,本发明涉及一种被配置为通过移除扭矩分析来执行封盖测试的系统,以便基于样本的特征来确定用于将特定盖子(例如,由塑料或诸如铝的金属材料制成的)应用到特定容器(例如,由塑料、玻璃或诸如铝的金属材料制成的瓶子、烧瓶等)的最佳的一个或多个参数。本发明还涉及一种利用上述系统进行封盖测试的方法。
背景技术:
1、已知现有技术的封盖测试,操作员手动拾取盖子和预制件并将它们放置在封盖头下方。封盖是通过使用操作员根据他/她自己的经验设置的封盖参数来进行的。在封盖头的下游,操作员使用适当的工具(例如手动或自动扭矩计)根据再次打开参数进行质量测试。操作员使用在封闭后测试步骤期间获得的再次打开参数来设置要在封盖头中采用的封闭参数,并且该方法可以重复几次,直到建立针对所使用盖子类型可获得的最佳条件。
2、因此,根据现有技术,基于重新打开测试的结果以完全经验的方式确定用于将特定盖子应用到特定容器的最佳参数。
3、这些方面确实会影响,有时还会在很大程度上影响基于已进行的测试的结果确定的参数的准确性和可靠性。
4、所述已知系统因此具有几个系列的缺点,主要与由于操作员的必要的手动干预而产生的不可避免的误差幅度有关。一个缺点源于这样的事实,在所述已知系统中,操作者手动执行从给自容器中拾取待测试的盖子和相应的预制件,以及随后将其放入封盖头中,从而开始封盖循环。在封盖循环结束时,操作员再次进行干预以进行手动拾取测试样品和随后的重新打开测试,例如通过扭矩计。
5、首先,可以理解的是,由于将盖子和预制件放置到封盖头的适当座中是通过操作者的手动干预进行的,所以不能保证在执行放置所述待测试部件时的明显的可重复性。
6、此外,考虑到所述待测试部件(即,盖子和相应的预制件)必须首先由操作者处理,首先拾取它们,然后随后放置它们,值得注意的是,它们经常经历意外变形或损坏(例如,盖子椭圆化),从而有时严重损害所进行的测试结果的准确性和可靠性。
7、此外,在封盖测试的初始步骤(拾取盖子和预制件并放置它们)和最终步骤(拾取加盖的样品)期间需要操作员手动干预,使得难以进行大量测试。
8、另一方面,轻松、可靠且明显地跟踪不同时间测试的样品的参数存在很大的困难。
9、现有技术的另一个缺点源于以下事实:对与盖子和预制件在进行封盖测试时相关的封盖结果具有重要意义的某些物理参数,例如材料温度和横截面椭圆度,完全忽略了。即使上述物理参数之一的变化,也可能导致需要改变封盖参数以便在重新打开参数方面实现相同的结果。为此,尽管事实上根据所描述的现有技术进行的封盖测试是利用人类尽可能高的技能来进行的,但结果不可避免地是不确定的和可变的,因此不完全可靠。
技术实现思路
1、鉴于前述考虑,本发明的目的在于提供一种用于执行封盖测试的自动化系统,尤其是通过移除扭矩分析,该系统允许定义准确且可靠的参数,从而最佳地执行将特定盖子应用到特定容器。
2、为了实现上述目的,本发明提供了一种执行封盖测试的自动化系统,根据附加的权利要求。
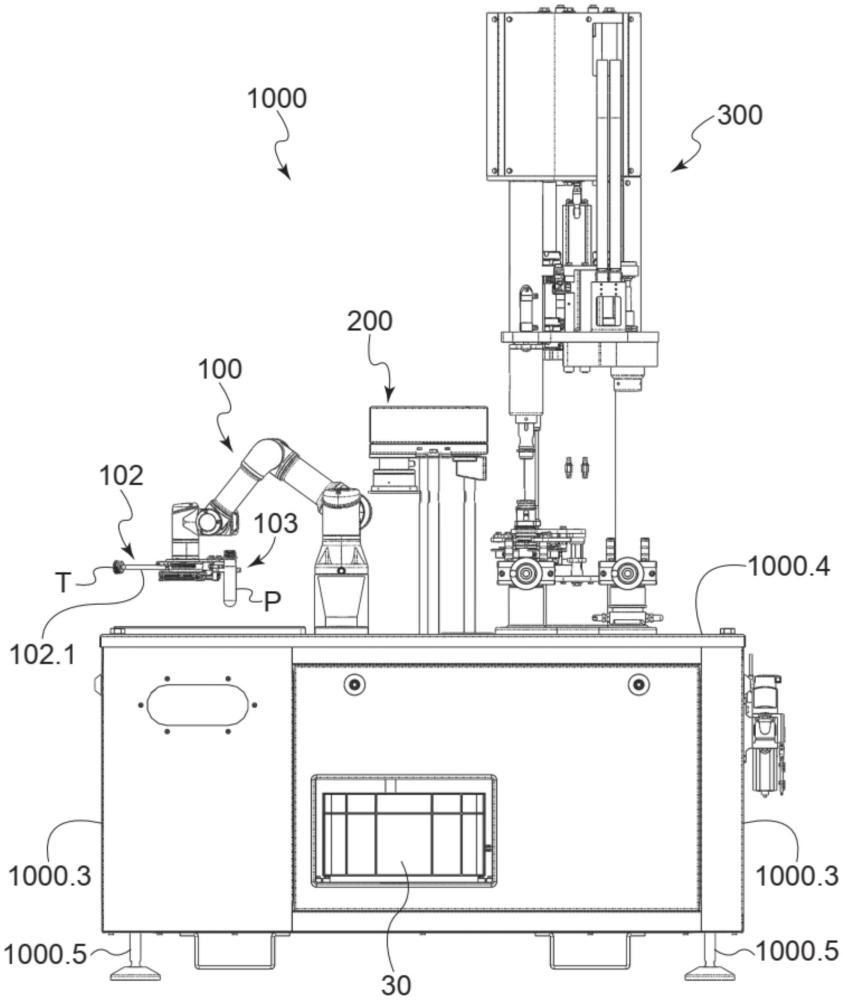
3、更具体地,根据本发明的用于进行封盖测试的自动化系统包括:
4、-电子处理器装置;
5、-第一容器,用于容纳多个盖子,可随机排列的;
6、-第二容器,用于容纳多个预制件,可随机排列的;
7、-用于盖子和预制件的质量控制装置;
8、-机器人装置,被配置为从所述第一容器中识别、选择和拾取待测试的盖子和从所述第二容器中识别、选择和拾取待测试的预制件,并且用于随后将所述盖子和所述预制件放入所述质量控制装置的相应座中;
9、-封盖控制装置,布置在所述质量控制装置的下游并且被配置用于:
10、-执行至少一次将所述盖子施加至所述预制件上的应用循环,以获得样品,并且
11、-基于在应用循环期间检测到的机械和/或物理量确定所述样品的一个或多个特征,
12、以及
13、-打标装置,配置为在每个测试样本上附着标记,以标识在此所确定的特征;
14、其中,所述电子处理器装置用软件装置来实现,该软件装置被配置为基于所述样品的所述特征来确定对于执行将盖子施加到容器上最佳的一个或多个参数,所述盖子和所述容器具有分别与形成所述样品的盖子和预制件相同的机械和物理特征。
15、据此,根据本发明的系统使得能够令人满意地克服上述现有技术的缺点,这些缺点主要与操作员在进行测试时(尤其是在其初始和最终步骤中)必要的手动干预有关。
16、有利地,所述机器人装置是协作型机器人(cobot)。
17、机器人装置可以包括3d视觉系统,用于识别和选择分别从所述第一容器和所述第二容器拾取的盖子和预制件。所述视觉系统还优选地配备有基于神经网络类型的控制装置,并且能够允许机器人装置拾取盖子和预制件,即使当所述盖子和预制件随机地布置在它们各自的容器内。
18、机器人装置还可以适当地包括:
19、-用于从所述第一容器拾取盖子并随后支撑其的机械装置,以及
20、-用于从所述第二容器拾取预制件并随后支撑其的机械装置。
21、标记装置可以是喷墨标记器。
22、识别每个样品的标记可以包括qr类型的代码。
23、所述质量控制装置被配置为执行与待测试的盖子和预制件相关的一个或多个机械和/或物理量的自动测量。有利地测量的典型量是制作盖子和预制件的材料的温度以及相对于最佳圆形横截面的表面椭圆度。
24、适当地,根据本发明的系统还可以包括用于临时放置从所述第一容器拾取的盖子的中间站。
25、此外,根据本发明的系统还可以包括存储器存储装置,该存储器存储装置包括用于存储关于每个测试样本确定的所述特性的数据库。
26、本发明还提供了一种利用根据上述一个或多个方面的系统执行封盖测试的方法,所述方法包括以下步骤:
27、-随机排列多个盖子在第一容器中;
28、-随机排列多个预制件在第二容器中;
29、以自动方式,识别、选择和拾取来自所述第一容器的盖子和来自所述第二容器的预制件;
30、-将所述盖子和所述预制件放入质量控制装置的相应座中;
31、-执行控制所述盖子和所述预制件的质量的操作;
32、-将所述盖子和所述预制件放入封盖控制装置的相应座中;
33、-执行至少一次将所述盖子施加至所述预制件上的应用循环,以获得样品;
34、-基于在应用循环期间检测到的机械和/或物理量确定所述样品的一个或多个特征;
35、-在所述样品上贴上识别在此所确定的特征的标记,
36、-将所述样品,包括其标记,存储到用于测试样品的收集容器中,以及
37、-基于所述样品的所述特征,确定用于将盖子应用到容器上的最佳的一个或多个参数,所述盖子和所述容器具有分别与形成所述样品的盖子和预制件相同的机械和物理特征。
38、有利地,本发明使得能够定义封盖操作,例如通过使用从箱子中自动拾取部件或“料箱拾取”的机器人来将盖子应用到容器上。
39、此外,有利地,根据本发明的系统使得能够识别适当的参数,以最佳地执行将特定盖子应用到特定的容器上,也可以以高频节奏的重复模式进行。
40、该结果的实现主要归功于这样的事实:根据本发明,最佳封盖参数是通过自动操作的方式确定的,优选地,通过使用cobot类型的协作机器人,在为此目的提供的测试装置中拾取待测试的盖子。
41、由于在工作循环中引入了机器人,本发明的系统实现了完全自动化,特别是在以下方面:
42、-盖子和预制件的选择和拾取;
43、-测量与拾取物品相关的物理量,测量时基本上不会造成任何改变,例如不会造成椭圆化和温度变化,并且基本上消除了人为干预对测量结果的影响;
44、-根据统计测试算法(扭矩-速度-参数),重复使用盖子并随后取下盖子;
45、-测量参与盖子封闭循环的物理量,如扭矩、力、速度和位置;
46、-在容器上重复盖子的使用过程,根据上述物理量,通过模拟扭矩负载的特定驱动方法,确定使用到容器步骤中的扭矩-角度比;
47、-自动确定进行封盖的最佳参数;
48、-能够标记预制件,例如通过打印机进行标记,通过适当的视觉系统读取其代码,并在稍后阶段进行测量。
- 还没有人留言评论。精彩留言会获得点赞!