包括多个双稳态阀的机器人化歧管系统的制作方法
本发明涉及一种包括多个双稳态阀的机器人化歧管系统。
背景技术:
1、已知在工业应用中使用歧管系统来制备产品,诸如润滑剂和润滑脂、油漆和清漆、纸、化学品、香水,其中使用原料液来制备半成品和成品。
2、歧管系统用于工艺的所有阶段,用于输送和/或混合原材料、半成品和成品。为此,歧管系统包括管道和阀门以定义不同的管运配置。
3、另外,管道应当被构思和安装得易于清洁,例如,由于清管器在歧管系统中循环,将剩余流体推送到管道外部。
4、因此,需要以可靠的方式致动阀门。如果空间减小,则在现有工厂中安装这种歧管系统会变得具有挑战性。管运以及阀门的致动也应当可接近以便维护。
5、本发明旨在解决上述的所有或一些缺点。
技术实现思路
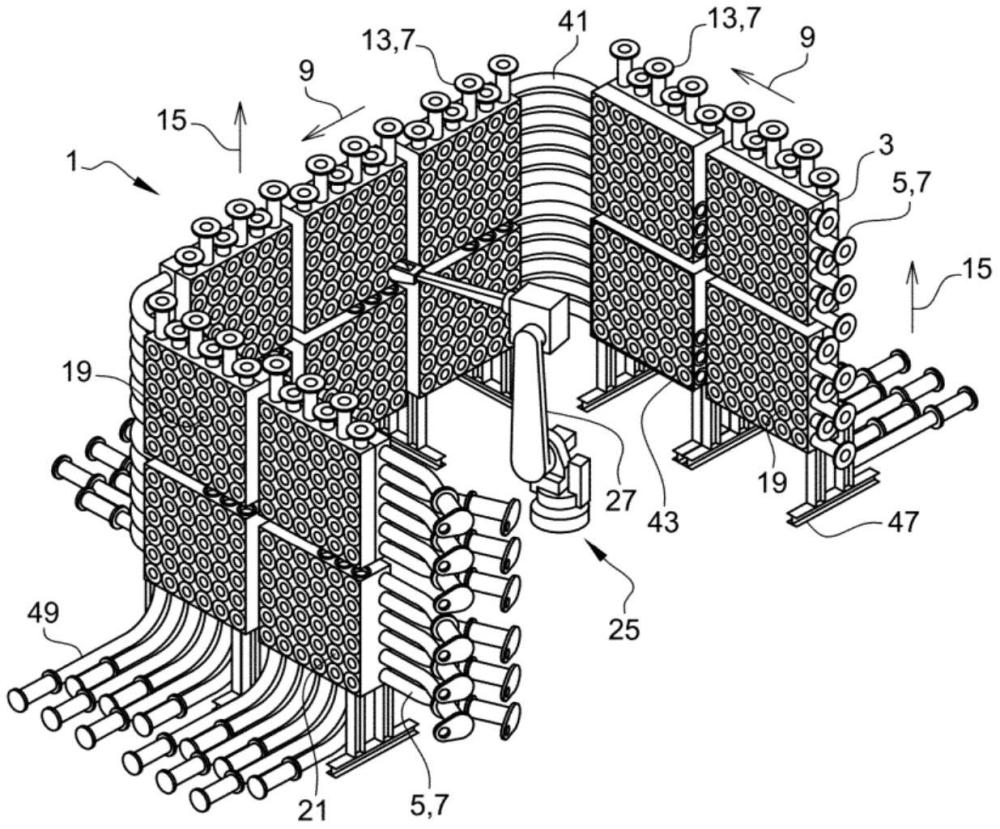
1、为此,本发明涉及一种机器人化歧管系统,包括:
2、管道矩阵,其包括根据第一方向延伸并包括在所述管道矩阵的第一层中的第一系列的管道、以及根据横向于所述第一方向的第二方向延伸并在所述管道矩阵的第二层中延伸的第二系列的管道,所述管道矩阵是根据横向于彼此地延伸的至少两个壁或至少一个弯曲壁来组织的,每个壁包括所述第一层和所述第二层中的一部分,
3、多个双稳态阀,其分布在所述至少两个壁或至少一个弯曲壁上,每个双稳态阀包括闸门主体,所述闸门主体被配置成在行位置中构成所述第一系列的管道的一部分和所述第二系列的管道的一部分,并且被配置成在横向位置中链接所述第一系列和第二系列的所述管道,
4、具有臂的机器人,所述臂被配置成单独地致动所述双稳态阀的每个闸门主体。
5、换句话说,管道矩阵包括用于输送流体的第一层和第二层,并且每个双稳态阀要么分开第一系列的管道与第二系列的管道,要么链接所述管道。
6、双稳态阀意味着当从一个位置被致动到另一个位置时,所述双稳态阀保持在适当位置。在致动后无需对阀门进行物理维护。当使用术语“横向”或“横向地”时,其意味着构成至少30°的角度。
7、每个双稳态阀可以利用单个机械致动器(即臂)独立地机械致动。由于管道矩阵包括横向延伸的至少两个壁,所以该机器人化歧管系统可以具有受限的尺寸。
8、用作多个双稳态阀的单个机械致动器的臂使得能够将用于致动的设备最小化。这在双稳态阀附近产生了自由空间,这有利于在减小的空间中安装机器人化歧管系统。
9、由于具有很少移动部件的臂的可靠性,因此还减少了维护且使得维护容易。机器人化歧管系统的简单设计还降低了投资成本。
10、根据本发明的一个方面,所述多个双稳态阀的每个闸门主体被布置成根据致动轴线在所述行位置与所述横向位置之间旋转,所述致动轴线横向于其上安装了所述闸门主体的所述壁的延伸平面。
11、因此,壁的双稳态阀的闸门主体具有横向于所述壁的相同取向。这种设置允许利用臂容易且可靠地致动双稳态阀。实际上,臂可以从一个阀门移动到另一个阀门,并旋转对应的闸门主体。
12、另外,闸门主体不会横向于对应的壁平移。这减小了壁的整体深度。
13、根据本发明的一个方面,每个双稳态阀包括可移除的外部凸缘,当所述外部凸缘被移除时,对应的闸门主体可横向于其上安装了所述闸门主体的所述壁的所述延伸平面从所述双稳态阀的其余部分抽出。
14、这种设置有利于双稳态阀的维护。无需拆除其他双稳态阀或管道矩阵的结构元件。优选地,每个双稳态阀在其两个末端包括两个可移除的外部凸缘,以允许从壁的两侧抽出闸门主体。
15、根据本发明的一个方面,每个外部凸缘呈现通向对应的闸门主体的致动元件的中央接近窗口。致动元件是被配置成与臂的末端工具协作的槽。所述槽可以呈现椭圆形形式。
16、根据本发明的一个方面,管道矩阵包括根据u形而组织的三个壁,所述机器人位于彼此面对的两个壁之间。
17、由于限制了到每个阀的距离,所以这种设置有利于通过臂致动双稳态阀。因此,限制了机器人化歧管系统的总体尺寸。
18、由于机器人被壁包围,因此这种配置还具有安全方面。这产生了可以被界定的安全区域,以防止在操作时接近机器人附近。
19、根据本发明的一个方面,所述第一系列的管道每个均包括所述至少两个壁之间的弯头部分。
20、换句话说,第一方向具有在壁内的直线部分和在壁之间的弯曲部分。
21、根据本发明的一个方面,每个壁包括多个阀门模块,每个阀门模块包括以行和列组织的双稳态阀、以及在行的两个端部处连接到所述第一系列的管道和在列的两个端部处连接到所述第二系列的管道的连接端口。
22、由于每个壁包括多个预制阀门模块,因此这种设置有利于壁的安装。因为壁的尺寸是可调整的,所以在工厂中对管道矩阵的调整是容易的。
23、根据本发明的一个方面,所述管道矩阵包括被布置成设置在平坦地面上的支架组件,所述支架组件包括至少两个单元元件,每个单元元件专用于对应的壁,所述第一方向是水平的,而所述第二方向是竖直的。
24、支架组件帮助将壁放置在平坦的地面上,并且水平地和竖直地对准第一方向和第二方向。
25、根据本发明的一个方面,所述支架组件包括支脚,以将所述至少两个壁定位在距所述平坦地面确定的距离处。
26、由于最低的双稳态阀远离平坦地面,因此该设置使得臂能够容易地致动双稳态阀。
27、根据本发明的一个方面,所述机器人化歧管系统包括链接到所述第二系列的对应管道的下部入口和出口管道,所述下部入口和出口管道是弯曲的,以在与所述第二系列的所述管道的连接区域处从竖直取向改变到水平取向。
28、与第二系列的管道的连接区域远离平坦地面。于是,可以使用下部入口和出口管道对管道进行排液或将管道矩阵与水平设置的产品源连接。
29、这种结构也涉及机器人化歧管系统的受限的尺寸。
30、根据本发明的一个方面,所述第一系列和所述第二系列的每个管道被配置成当所有对应的双稳态阀处于行位置时使得清管器能够循环以清洗所述管道。
31、这种构造使得能够清洗管道,包括与闸门主体内部相对应的部分。清管器被设计用于刮擦管道。
32、根据本发明的一个方面,所述臂包括至少三个被配置成相对于彼此旋转的部件、以及集中命令装置,所述集中命令装置包括用于控制所述臂的传感器。
33、根据本发明的一个方面,所述机器人化歧管系统包括被配置成接纳所述机器人的引导结构,所述机器人被配置成当被接纳在所述引导结构中时在两个端部位置之间移动。
34、因此,由于机器人在被接纳在引导结构中时是可移动的,引导结构使得臂能够致动更大的双稳态阀组。根据本发明的一个方面,引导结构被配置为使得机器人能够根据两个端部位置之间的平移而移位。
35、根据本发明的一个方面,该平移根据的是在彼此面对的管道矩阵的两个壁之间延伸且平行于这两个壁的轨线。
36、根据本发明的一个方面,所述引导结构是被配置成与所述机器人的互补支撑结构协作的轨道结构。
37、替代地,机器人化歧管系统可以不包括引导结构。在这种情况下,机器人化歧管系统可以包括被配置成与地面协作且其上安装了机器人的底座。实际上,取决于机器人化歧管系统的空间配置,可能不需要移动机器人。底座也可以与机器人集成在一起。
38、根据本发明的一个方面,所述机器人化歧管系统包括保护罩,所述保护罩被配置成安装在所述多个双稳态阀和所述机器人周围。
39、根据本发明的一个方面,所述保护罩包括布置在壁和机器人周围的联结面板。优选地,每个面板包括至少一个透明部分。特别地,所述保护罩被配置成具有诸如门的移动部分以贯通由所述保护罩所定义的区域的内部。
40、本发明还涉及一种设施,其包括所述机器人化歧管系统和用于控制所述机器人化歧管系统的工厂管理实体。所述工厂管理实体专用于所述设施的全局命令以及与所述设施的可以与所述机器人化歧管系统耦合的其它机器的同步。
41、上面定义的不冲突的不同方面可以进行组合。
- 还没有人留言评论。精彩留言会获得点赞!