基于无人机农药喷洒装置的自动对接补给方法及相关装置与流程
本技术涉及农业领域,尤其是涉及一种基于无人机农药喷洒装置的自动对接补给方法及相关装置。
背景技术:
1、传统农业喷洒方式中,人工喷洒农药需要大量的劳动力和时间,且存在效率低下、覆盖不均匀等问题。而无人机喷洒农药技术的出现,极大地降低了农业的人力成本。无人机具有灵活性、高效性和精准性的优势,可以快速覆盖大面积的农田,减少人工劳动量,提高农业作业效率。
2、目前,无人机的电池电量和农药储液量是影响无人机喷洒农药能力和工作效率的重要因素。无人机的电池电量决定了其可持续飞行的时间和行程。较低的电量会限制无人机的航程和喷洒范围,可能需要频繁的充电或更换电池,影响作业效率。农药储液量的增加会导致无人机携带更多重量,增加了能量消耗,从而降低了飞行时间和距离。在行程中的补给或更换农药储液也会增加无人机的停机时间和作业中断。
3、在相关技术中,通常采用人工加液的方式,但是人工向无人机添加药液存在一定的安全风险,操作过程中可能会发生意外事故,如误伤操作人员或药液泄漏等。此外,由于无人机的作业范围广,需要布置多名工作人员进行加液服务,具有人力成本高的问题。
技术实现思路
1、为了能够让无人机进行自动补充药液,提高农药喷洒效率,本技术提供一种基于无人机农药喷洒装置的自动对接补给方法及相关装置。
2、第一方面,本技术提供的一种基于无人机农药喷洒装置的自动对接补给方法,采用如下的技术方案:
3、一种基于无人机农药喷洒装置的自动对接补给方法,包括以下步骤:
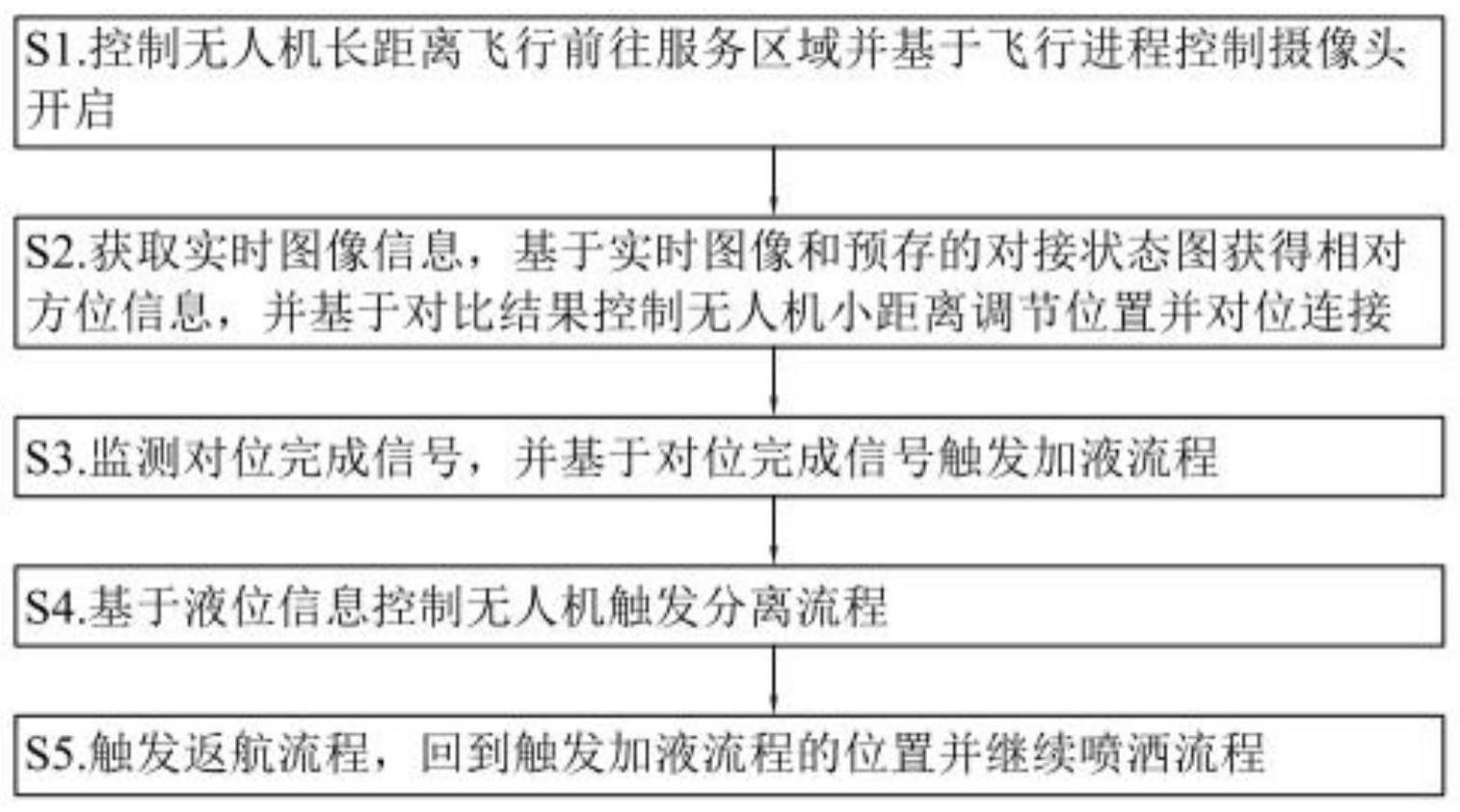
4、s1.控制无人机长距离飞行前往服务区域并基于飞行进程控制摄像头开启,其中,服务区域为一个或多个且基于预设的飞行路径设置;
5、s2.获取实时图像信息,基于实时图像和预存的对接状态图获得相对方位信息,并基于对比结果控制无人机小距离调节位置并对位连接;
6、s3.监测对位完成信号,并基于对位完成信号触发加液流程;
7、s4.基于液位信息控制无人机触发分离流程。
8、通过采用上述技术方案,无人机在作业过程中,电池的消耗和药液的消耗通常是不同步的,其中,电池的消耗速度取决于滞空时间和负载重量,而滞空之间又包括了工作地和服务区之间的往返时间和在工作地的工作时间,负载药液的重量又决定了在工作地的工作时间,因此本方案通过在各个工作地旁边设置服务区域,而不是在远处设置一个统一的补给基地,因此,本方案能够降低工作地和服务区之间的往返时间,有效提高无人机的滞空之间。另外,由于工作地和服务区之间能够设计得足够靠近,因此无需为了降低无人机往返次数而刻意增大无人机的单次载液量,对于较小的储液箱,无人机能够通过多次补给实现往返时间和工作时间的整体最小。但是,当服务区设置为多个时,则不利于采用人工值守的方式,本方案通过依靠无人机进行自动加液并利用计算机视觉来判断加液的时机。
9、在本方案中,当无人机判断需要加液时,控制无人机前往服务区域,在该飞行过程中停止喷洒药液,同时打开摄像头以获取实时图像信息,并与预存的对接状态图进行对比,可以获取相对方位信息。通过对比结果,无人机可以实现小距离的位置调节和对位连接。这样的精确控制可以确保无人机和补给装置之间的准确对接,减少误差和损失。通过自动对接补给方法,无人机无需人工干预即可完成补液过程。它可以在飞行进程中自动触发对接操作,减少了停机时间和中断,提高了喷洒作业的连续性和效率。该方法监测对位完成信号,并基于信号触发加液流程。通过实时监测和控制,可以确保补液过程在正确的时机进行,使得无人机的储液箱能够与加液装置准确对接,并在对接完成后再进行加液操作,从而避免漏液的问题。使用液位信息控制无人机触发分离流程,可以保证补液过程的安全性。当达到预设液位或补液完成时,无人机可以准确地分离,并避免溢出和浪费。
10、可选的,所述的控制无人机长距离飞行前往服务区域并基于飞行进程控制摄像头开启的步骤,包括:
11、s11.获取液位信息,并基于液位信息与第一预设阈值的相对大小触发加液流程;
12、s12.获取实时位置信息,并基于实时位置信息和第一方位信息的相对关系控制无人机前往预设服务区域,其中第一方位信息用于表征预设服务区域的位置,预设服务区域内设置有加液装置;
13、s13.基于实时位置信息和第一方位信息的相对关系判断是否进入到预设服务区域,当进入时则发出姿态调整信息,以使得药液输入头朝向药液输出头;
14、s14.启动摄像头,并获取实时图像信息,其中,摄像头朝向药液输入头设置。
15、通过采用上述技术方案,通过获取液位信息并与第一预设阈值进行比较,实现了对液位状态的监测和判断。基于液位信息与阈值的比较结果,触发加液流程,确保及时进行补液操作,保持补液装置的液位在预设范围内。通过获取实时位置信息和第一方位信息,判断无人机当前位置与预设服务区域之间的相对关系。基于实时位置信息和第一方位信息的相对关系,控制无人机前往预设服务区域,确保无人机准确到达需要进行补液的区域。预设服务区域内设置有加液装置,使得无人机能够在正确的位置上进行补液操作。利用实时位置信息和第一方位信息的相对关系,判断无人机是否已进入预设服务区域。当无人机进入预设服务区域时,发出姿态调整信息,使得药液输入头朝向药液输出头。通过姿态调整,确保药液输入头和输出头的正确对准,以便进行准确的补液操作。实时图像信息可用于后续的图像处理和分析,以支持对接补液过程中的决策和控制。
16、可选的,若药液输出头相对地面固定,则预录入药液输出头的朝向信息,并基于药液输出头的朝向信息确定姿态调整信息;
17、若药液输出头相对地面不固定,则获取药液输出头的实时朝向信息,并基于药液输出头的实时朝向信息生成姿态调整信息。
18、可选的,所述的获取液位信息,并基于液位信息与第一预设阈值的相对大小触发加液流程的步骤和所述获取实时位置信息,并基于实时位置信息和第一方位信息的相对关系控制无人机前往预设服务区域的步骤之间,还包括:
19、记录触发加液流程的位置,中断喷洒流程。
20、可选的,所述的获取实时图像信息,基于实时图像和预存的对接状态图获得相对方位信息,并基于对比结果控制无人机小距离调节位置并对位连接的步骤,包括:
21、s21.获取实时图像信息,基于实时图像和预存的对接状态图获得相对方位信息;
22、s22.基于对比结果控制无人机小距离调节位置;
23、s23.发出电磁铁正向通电信息以使得药液输入头上的电磁铁与药液输出头上的磁性件相吸。
24、通过采用上述技术方案,通过获取实时图像信息,提取其中的关键特征,如药液输入头和药液输出头的位置、形状等。基于实时图像信息和预存的对接状态图,通过图像处理和比对,获得无人机与补液装置之间的相对方位信息。通过相对方位信息,确定无人机与补液装置之间的空间关系,为后续的调节位置和对接操作提供依据。基于对接状态图和实时图像信息之间的对比结果,判断无人机当前位置与补液装置的位置偏差情况。控制无人机进行小距离调节位置的操作,使其逐步接近预设的对接位置。通过调节位置,实现无人机与补液装置之间的准确对准,为后续的对接操作做好准备。
25、当无人机接近预设对接位置时,发出电磁铁正向通电信息。通过电磁铁的吸引力,使药液输入头上的电磁铁与药液输出头上的磁性件相吸引,实现二者的连接。通过磁性件的吸引力,确保无人机与补液装置之间的稳定对接,避免在补液过程中产生脱落或松动等情况。
26、可选的,所述的基于液位信息控制无人机触发分离流程的步骤,包括:
27、s41.获取液位信息,并基于液位信息与第二预设阈值的相对大小发出电磁阀关闭信息,其中,药液输出头和药液输入头上均设置有电磁阀,电磁阀用于开关药液输出头和药液输入头;
28、s42.基于电磁阀关闭信息的发出,延时发出电磁铁反向通电信息以使得药液输入头上的电磁铁与药液输出头上的磁性件相斥。
29、通过采用上述技术方案,通过获取液位信息,获取补液装置中药液的当前液位情况。将当前液位信息与预设的第二阈值进行比较,判断液位的相对大小关系。当液位信息与第二阈值的相对大小满足特定条件时,发出电磁阀关闭信息,用于控制药液输出头和药液输入头上的电磁阀关闭。在电磁阀关闭信息发出后,延时一定时间,发出电磁铁反向通电信息,使得药液输入头上的电磁铁产生相斥力。通过相斥力,使药液输入头上的电磁铁与药液输出头上的磁性件发生排斥,实现二者的分离。
30、可选的,所述的自动对接补给方法还包括以下步骤:
31、触发返航流程,回到触发加液流程的位置并继续喷洒流程。
32、第二方面,本技术提供的一种基于无人机农药喷洒装置的自动对接补给装置,采用如下的技术方案:
33、一种基于无人机农药喷洒装置的自动对接补给装置,包括:
34、预备控制模块,用于控制无人机长距离飞行前往服务区域并基于飞行进程控制摄像头开启;
35、图像定位对接模块,用于获取实时图像信息,基于实时图像和预存的对接状态图获得相对方位信息,并基于对比结果控制无人机小距离调节位置并对位连接;
36、加液模块,用于监测对位完成信号,并基于对位完成信号触发加液流程;
37、分离模块,用于基于液位信息控制无人机触发分离流程。
38、第三方面,本技术提供的一种计算机设备,采用如下的技术方案:
39、一种计算机设备,其包括:
40、一个或多个处理器;
41、存储器;
42、一个或多个应用程序,其中所述一个或多个应用程序被存储在所述存储器中并被配置为由所述一个或多个处理器执行,所述一个或多个程序配置用于:执行上述的基于无人机农药喷洒装置的自动对接补给方法。
43、第四方面,本技术提供的一种计算机可读存储介质,采用如下的技术方案:
44、一种计算机可读存储介质,存储有能够被处理器加载并执行如上的上述方法的计算机程序。
45、所述存储介质存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现:如上述的基于无人机农药喷洒装置的自动对接补给方法。
- 还没有人留言评论。精彩留言会获得点赞!