一种智能充配机器人的制作方法
本技术涉及配药设备,具体涉及一种智能充配机器人。
背景技术:
1、安瓿瓶是用于盛装药液的小型玻璃容器,一般用于注射用药液。传统安瓿瓶配药是通过人工将安瓿瓶瓶颈打磨、将瓶头击碎,然后用针筒将安瓿瓶中的药液抽吸出来,最后才通过针筒将安瓿瓶药液注入到输液袋中。这种配药方法人工劳动强度较高,瓶头击碎的断口参差不齐,配药过程中存在玻璃残渣及药液飞溅的问题,容易对医护人员造成伤害,在需要大量安瓿瓶药液配置的场合,配药效率较低,远远不能满足实际需要。
技术实现思路
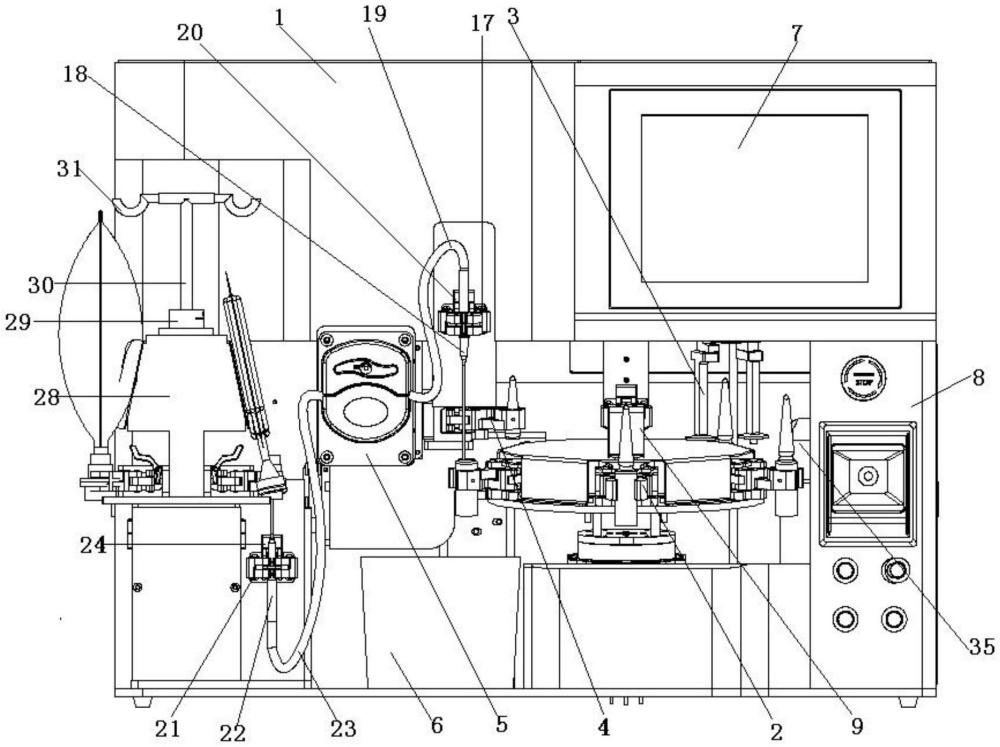
1、本实用新型的目的在于提供一种智能充配机器人,以解决背景技术中提到的问题。为实现上述目的,本实用新型提供如下技术方案:一种智能充配机器人,包括壳体,所述壳体上安装有安瓿转盘模组,所述安瓿转盘模组上安装有夹爪模组,所述安瓿转盘模组侧边沿逆时针安装有安瓿定位模组、安瓿划割模组、破瓶模组和药液抽取模组,所述安瓿划割模组、破瓶模组和药液抽取模组安装于壳体上,所述药液抽取模组连接泵模组,所述泵模组连接溶媒抽取模组,所述溶媒抽取模组上方安装有溶媒转盘工位模组,所述药液抽取模组下方设有废料收纳模组。
2、优选地,所述壳体上安装有显示器,所述显示器连接操作面板,所述操作面板安装于壳体上,所述安瓿转盘模组、夹爪模组、安瓿划割模组、破瓶模组、泵模组和溶媒转盘工位模组均连接操作面板。
3、优选地,所述安瓿转盘模组包括整机底座,所述整机底座上安装有中空转盘,所述中空转盘连接电机组件,所述电机组件安装于整机底座上,所述中空转盘上通过支架安装有转盘底座,所述转盘底座上设有夹爪模组安装卡位,夹爪模组安装卡位上安装有夹爪模组,所述转盘底座倾斜安装,与水平面存在5°夹角,所述中空转盘上安装有位置传感片,所述整机底座上安装有位置传感器,所述位置传感器与位置传感片位置对应。
4、优选地,所述药液抽取模组包括上固定座,所述上固定座上安装有药液抽取针,所述药液抽取针通过抽取管道连接泵模组,所述上固定座后端穿过升降孔连接上升降气缸,所述升降孔开于壳体上,所述上升降气缸安装于壳体内部,所述上升降气缸连接操作面板。
5、优选地,所述溶媒抽取模组包括下固定座,所述下固定座上安装有药液注入针,所述药液注入针通过注入管道连接泵模组,所述下固定座后端穿过升降孔ⅰ连接下升降气缸,所述升降孔ⅰ于壳体上,所述下升降气缸安装于壳体内部,所述下升降气缸连接操作面板。
6、优选地,所述溶媒转盘工位模组包括支架,所述支架上安装有中空转台模组,所述中空转台模组底部连接驱动电机模组,所述中空转台模组上安装有安装台,所述安装台上安装有挂杆调节底座,所述挂杆调节底座上螺纹连接有溶媒挂杆,所述溶媒挂杆顶部两侧安装有溶媒挂钩,所述中空转台模组上安装有溶媒夹爪模块,所述溶媒夹爪模块与溶媒挂钩位置上下对应,所述中空转台模组上开有弧形槽,所述弧形槽与溶媒夹爪模块位置对应,安装台两侧为斜面结构,斜面结构上安装有导向板。
7、优选地,所述安瓿划割模组一侧设有消毒组件。
8、本实用新型的技术效果和优点:本机器人能够实现安瓿瓶的自动配药,替代了手工操作,大大提高人工配药的效率;可在密封的环境下减少了配药的空气污染,降低配药职业伤害的发生;可以避免了人工操作时安瓿破瓶对人手的伤害,且安瓿瓶断口整齐,无明显玻璃碎屑。
技术特征:
1.一种智能充配机器人,包括壳体,其特征在于:所述壳体上安装有安瓿转盘模组,所述安瓿转盘模组上安装有夹爪模组,所述安瓿转盘模组侧边沿逆时针安装有安瓿定位模组、安瓿划割模组、破瓶模组和药液抽取模组,所述安瓿划割模组、破瓶模组和药液抽取模组安装于壳体上,所述药液抽取模组连接泵模组,所述泵模组连接溶媒抽取模组,所述溶媒抽取模组上方安装有溶媒转盘工位模组,所述药液抽取模组下方设有废料收纳模组。
2.根据权利要求1所述的一种智能充配机器人,其特征在于:所述壳体上安装有显示器,所述显示器连接操作面板,所述操作面板安装于壳体上,所述安瓿转盘模组、夹爪模组、安瓿划割模组、破瓶模组、泵模组和溶媒转盘工位模组均连接操作面板。
3.根据权利要求2所述的一种智能充配机器人,其特征在于:所述安瓿转盘模组包括整机底座,所述整机底座上安装有中空转盘,所述中空转盘连接电机组件,所述电机组件安装于整机底座上,所述中空转盘上通过支架安装有转盘底座,所述转盘底座上设有夹爪模组安装卡位,夹爪模组安装卡位上安装有夹爪模组,所述转盘底座倾斜安装,与水平面存在5°夹角,所述中空转盘上安装有位置传感片,所述整机底座上安装有位置传感器,所述位置传感器与位置传感片位置对应。
4.根据权利要求2所述的一种智能充配机器人,其特征在于:所述药液抽取模组包括上固定座,所述上固定座上安装有药液抽取针,所述药液抽取针通过抽取管道连接泵模组,所述上固定座后端穿过升降孔连接上升降气缸,所述升降孔开于壳体上,所述上升降气缸安装于壳体内部,所述上升降气缸连接操作面板。
5.根据权利要求2所述的一种智能充配机器人,其特征在于:所述溶媒抽取模组包括下固定座,所述下固定座上安装有药液注入针,所述药液注入针通过注入管道连接泵模组,所述下固定座后端穿过升降孔ⅰ连接下升降气缸,所述升降孔ⅰ于壳体上,所述下升降气缸安装于壳体内部,所述下升降气缸连接操作面板。
6.根据权利要求1所述的一种智能充配机器人,其特征在于:所述溶媒转盘工位模组包括支架,所述支架上安装有中空转台模组,所述中空转台模组底部连接驱动电机模组,所述中空转台模组上安装有安装台,所述安装台上安装有挂杆调节底座,所述挂杆调节底座上螺纹连接有溶媒挂杆,所述溶媒挂杆顶部两侧安装有溶媒挂钩,所述中空转台模组上安装有溶媒夹爪模块,所述溶媒夹爪模块与溶媒挂钩位置上下对应,所述中空转台模组上开有弧形槽,所述弧形槽与溶媒夹爪模块位置对应,安装台两侧为斜面结构,斜面结构上安装有导向板。
7.根据权利要求1所述的一种智能充配机器人,其特征在于:所述安瓿划割模组一侧设有消毒组件。
技术总结
本技术公开了一种智能充配机器人,包括壳体,所述壳体上安装有安瓿转盘模组,所述安瓿转盘模组上安装有夹爪模组,所述安瓿转盘模组侧边沿逆时针安装有安瓿定位模组、安瓿划割模组、破瓶模组和药液抽取模组,所述安瓿划割模组、破瓶模组和药液抽取模组安装于壳体上,所述药液抽取模组连接泵模组,所述泵模组连接溶媒抽取模组,所述溶媒抽取模组上方安装有溶媒转盘工位模组,所述药液抽取模组下方设有废料收纳模组。本机器人能够实现安瓿瓶的自动配药,替代了手工操作,大大提高人工配药的效率;可在密封的环境下减少了配药的空气污染,降低配药职业伤害的发生。
技术研发人员:赖仰贵,张雅竹
受保护的技术使用者:上海贝林尔智能系统有限公司
技术研发日:20230703
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!