一种全自动对位下装鹤管及其对位方法与流程
本发明涉及流体装卸鹤管,特别是涉及一种全自动对位下装鹤管及其对位方法。
背景技术:
1、鹤管是一种可以伸缩移动的管子,多用于石油和水等液体的装卸。它采用旋转接头与刚性管道及弯头连接起来,以实现汽车槽车与储运管线之间传输液体介质的活动设备。鹤管包括上装鹤管和下装鹤管,其中,下装鹤管是指与槽车底部位置对接,实现液体介质输送的装置。上装鹤管由于油品对槽车罐底的冲击,会产生大量的静电,带来很大的安全隐患;而下装鹤管可以实现液体静态装车,回避油品与罐体的冲击,大大减少了静电和油气挥发的产生,解决装车过程中存在的安全隐患,且下装鹤管实现液面静态装车,没有油品的冲击,就大大减少了油气的挥发,保护了环境。目前,下装鹤管装车较多采用半自动化,即需要人工遥控操作,但是,这样容易产生对位不准、角度确定难度大等问题。因此,需要一种提高下装鹤管对位精准度的方案。
技术实现思路
1、本发明的目的就在于为了解决上述问题而提供一种全自动对位下装鹤管及其对位方法。
2、本发明通过以下技术方案来实现上述目的:
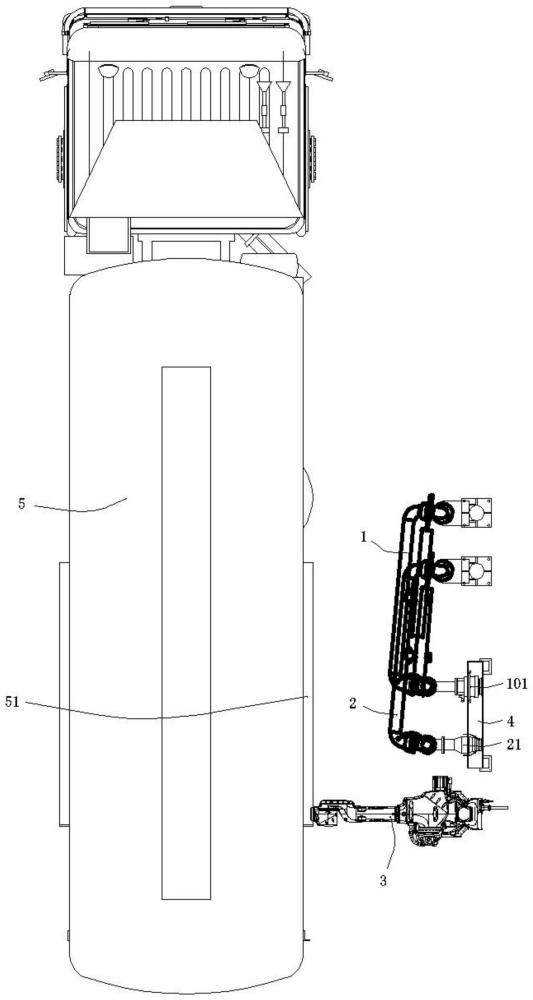
3、一种全自动对位下装鹤管,包括液相输送机构、气相输送机构、机械手、3d视觉机构和控制主机,所述液相输送机构和所述气相输送机构并排固定安装,所述液相输送机构和所述气相输送机构一侧设置有机械手,所述机械手上设置有夹持部,所述夹持部一侧固定安装有3d视觉机构,所述控制主机与所述3d视觉机构、所述机械手、所述液相输送机构和所述气相输送机构均电连接。
4、优选地,所述液相输送机构包括立柱,所述立柱上固定设置有第一管道,所述第一管道靠近所述立柱顶部一端固定设置有第一旋转接头,所述第一旋转接头远离所述第一管道一端固定设置有第一连接管,所述第一连接管远离所述第一旋转接头一端固定设置有第二旋转接头,所述第二旋转接头远离所述第一连接管一端固定设置有第二管道,所述第二管道一侧铰接设置有弹簧缸,弹簧缸的活塞杆与所述第二旋转接头铰接,所述第二管道远离所述第二旋转接头一端固定设置有第三旋转接头,所述第三旋转接头远离所述第二管道一端固定设置有第二连接管,所述第二连接管远离所述第三旋转接头一端固定设置有金属软管,所述金属软管远离所述第三旋转接头一端固定设置有液相接头,所述液相接头一侧固定设置有第一气动卡盘。
5、优选地,所述气相输送机构包括立柱,所述立柱上固定设置有第一管道,所述第一管道靠近所述立柱顶部一端固定设置有第一旋转接头,所述第一旋转接头远离所述第一管道一端固定设置有第一连接管,所述第一连接管远离所述第一旋转接头一端固定设置有第二旋转接头,所述第二旋转接头远离所述第一连接管一端固定设置有第二管道,所述第二管道一侧铰接设置有弹簧缸,弹簧缸的活塞杆与所述第二旋转接头铰接,所述第二管道远离所述第二旋转接头一端固定设置有第三旋转接头,所述第三旋转接头远离所述第二管道一端固定设置有第二连接管,所述第二连接管远离所述第三旋转接头一端固定设置有金属软管,所述金属软管远离所述第三旋转接头一端固定设置有气相接头,所述气相接头一侧固定设置有第二气动卡盘。
6、优选地,所述气相输送机构远离所述液相输送机构一侧设置有停靠支架,所述停靠支架上沿着水平方向设置有与所述液相输送机构相配合的液相接口和与所述气相输送机构相配合的气相接口。
7、优选地,所述液相接头靠近端部位置固定设置有位置传感器,所述位置传感器与所述控制主机电连接。
8、优选地,所述气相接头靠近端部位置固定设置有位置传感器,所述位置传感器与所述控制主机电连接。
9、优选地,所述机械手的夹持部固定设置有圆杆。
10、优选地,所述3d视觉机构包括箱体,所述箱体内部设置有激光发射器和双目工业相机,所述箱体外部设置有可与所述机械手的夹持部固定安装的安装架,所述激光发射器和双目工业相机分别与所述控制主机电连接。
11、优选地,槽车侧面靠近底部位置设置有装卸口,所述装卸口上固定设置有安装板,所述安装板上沿着水平方向设置有与所述液相输送机构相配合的液相接口和与所述气相输送机构相配合的气相接口。
12、一种用于全自动对位下装鹤管的对位方法,包括以下步骤:
13、(1)槽车停车准备,司机将槽车停在液相输送机构和气相输送机构附近的目标位置,然后司机取下槽车装卸口的安装板上的液相接口和气相接口的防尘罩,然后接通槽车上的静电接地保护器,最后司机撤离现场;
14、(2)获取槽车装卸口的液相接口位置信息,控制主机控制机械手自校正零点,然后控制主机控制激光发射器和双目工业相机工作对槽车的装卸口进行扫描,定位槽车装卸口的安装板上的液相接口位置,得到液相接口精准的位置坐标a以及其空间姿态信息b,并将其保存在控制主机中;
15、(3)获取停靠支架上的液相接头位置信息,液相接头和气相接头起始分别与停靠支架上的液相接口和气相接口相配合固定,控制主机控制机械手运动到停靠支架附近,控制主机控制激光发射器和双目工业相机工作对停靠在停靠支架上的液相输送机构的液相接头上的第一气动卡盘进行扫描,得到第一气动卡盘精准的位置坐标c以及其空间姿态信息d;
16、(4)机械手抓取停靠支架上的液相接头,控制主机根据步骤(3)中获取的第一气动卡盘精准的位置坐标c和空间姿态信息d控制机械手调整自己的位置和姿态使得夹持部的圆杆与第一气动卡盘保持同轴,然后,控制主机控制机械手带动夹持部的圆杆伸入至第一气动卡盘内,最后,控制主机控制第一气动卡盘工作将圆杆夹持住,使得机械手完成对于液相接头的抓取;
17、(5)机械手移动液相接头,控制主机调取步骤(2)中获取的液相接口位置坐标a和空间姿态信息b,然后,控制主机控制机械手拉动液相接头与停靠支架上的液相接口分离并带动液相接头移动至槽车的液相接口位置坐标a附近,然后,控制主机根据液相接口精准的位置坐标a和空间姿态信息b控制机械手调整液相接头的位置和姿态,使得液相接头与槽车装卸口的安装板上的液相接口保持同轴;
18、(6)液相接头与槽车上液相接口对位,控制主机控制机械手推动与槽车装卸口的安装板上的液相接口保持同轴度的液相接头朝向槽车装卸口的安装板上的液相接口方向运动,直到液相接头与液相接口紧密配合时,液相接头上的位置传感器发送电信号至控制主机,控制主机控制第一气动卡盘松开机械手的圆杆,机械手与液相接头分离,液相输送机构的液相接头与槽车的安装板上的液相接口对位完成;
19、(7)气相接头与槽车上气相接口对位,同理,重复步骤(2)至步骤(6)可完成气相输送机构的气相接头与槽车装卸口的安装板上的气相接口的对位,然后,控制主机控制机械手返回至原点位置;
20、(8)液体装车,控制主机控制液相接头和气相接头上的api接头阀门打开,液体开始装车;
21、(9)机械手抓取位于槽车装卸口上的液相接头,液体装车结束后,控制主机控制液相接头和气相接头上的api接头阀门关闭,控制主机控制位于原点位置的机械手再次移动到槽车装卸口的安装板上的液相接口位置坐标a附近,然后,控制主机控制激光发射器和双目工业相机工作对对位在液相接口上的液相输送机构的液相接头上的第一气动卡盘进行扫描,得到第一气动卡盘精准的位置坐标e以及其空间姿态信息f,然后,控制主机控制机械手的夹持部上的圆杆伸入至第一气动卡盘内,最后,控制主机控制第一气动卡盘工作将圆杆夹持住,使得机械手完成对于液相接头的抓取;
22、(10)液相接头复位至停靠支架上液相接口,由于停靠支架的位置是始终固定不变的,因此,停靠支架上的液相接口的位置坐标g和空间姿态信息h可以预先存储在控制主机中,控制主机根据停靠支架上的液相接口精准位置坐标g和空间姿态信息h控制机械手带动液相接头与槽车装卸口的安装板上的液相接口分离并带动液相接头移动至停靠支架的液相接口位置坐标g附近,然后,控制主机根据液相接口精准的位置坐标g和空间姿态信息h控制机械手调整液相接头的位置和姿态,使得液相接头与停靠支架上的液相接口保持同轴,然后,控制主机控制机械手推动与停靠支架上的液相接口保持同轴度的液相接头朝向停靠支架上的液相接口方向运动,直到液相接头与液相接口紧密配合时,液相接头上的位置传感器发送电信号至控制主机,控制主机控制第一气动卡盘松开机械手的圆杆,机械手与液相接头分离,液相输送机构的液相接头复位完成;
23、(11)气相接头复位至停靠支架上气相接口,同理,重复步骤(9)和步骤(10)可完成槽车上气相输送机构的气相接头的复位,然后,控制主机控制机械手返回至原点位置,自此整个工作过程结束。
24、本发明的有益效果在于:(1)本发明采用机械手代替现有对位装置,具有灵活性高,方便对位操作的优势;(2)采用激光发射器和双目工业相机构成的3d视觉机构,通过激光发射器和双目工业相机扫描目标物获取目标物的点云图关键数据,计算可得目标物的精确位置坐标信息和空间姿态信息,使得下装鹤管与汽车槽车的对位精准度高;(3)控制主机控制机械手带动下装鹤管实现全自动对位,对位过程中无需人工遥控操作,降低人工的工作量,且提高了对位效率。
- 还没有人留言评论。精彩留言会获得点赞!