平面相对位置检测工具及其检测方法与流程
[0001]
本发明涉及半导体设备领域,尤其涉及一种平面相对位置检测工具及其检测方法。
背景技术:
[0002]
在半导体蚀刻设备组装矫正过程中,通常会涉及多个组件平面的对准,平面位置的偏移将影响半导体工艺制程,从而影响产品良率。如对硅片进行等离子体轰击时,需要利用静电卡盘固定硅片,而为了避免等离子体在静电卡盘边缘处泄露,使硅片中间区域和边缘区域均具有接近当量的等离子体轰击,一般会在静电卡盘边缘围设一圈聚集环,且聚焦环的上表面和静电卡盘的上表面需保持齐平。因此,需要设计一种便捷的检测工具,用于检测平面的相对位置,有利于将平面调整至合适位置。
技术实现要素:
[0003]
基于此,本申请提出一种平面相对位置检测工具及其检测方法,有利于实现平面的对准。
[0004]
一种平面相对位置检测工具,用于检测相互平行的可调平面与基准平面的相对高度,所述检测工具包括:
[0005]
基底;
[0006]
第一距离传感器,集成于所述基底内,用于检测沿第一方向,所述第一距离传感器与所述基准平面之间的第一距离,所述第一方向是与所述基准平面垂直的方向;及
[0007]
第二距离传感器,集成于所述基底内,用于检测沿所述第一方向,所述第二距离传感器与所述可调平面之间的第二距离。。
[0008]
上述相对位置检测工具,内部集成有第一距离传感器和第二距离传感器,以第一距离传感器为第一参考点,第一距离传感器检测到的第一距离实际是第一参考点与基准平面的垂直距离,以第二距离传感器为第二参考点,当可调平面与基准平面平行时,第二距离传感器检测到的第二距离实际是第二参考点与可调平面的垂直距离,第一距离传感器与第二距离传感器在第一方向上的参考相对距离已知,在获取到上述第一距离和第二距离,结合已知的参考相对距离,便能检测出两平行平面在垂直方向的相对位置关系。
[0009]
在其中一个实施例中,所述第一距离传感器包括第一发光二极管和第一光敏三极管,所述第一发光二极管用于朝所述基准平面发射光信号,光信号经所述基准平面反射后到达所述第一光敏三极管,所述第一距离传感器根据光信号从所述第一发光二极管到达所述第一光敏三极管的传播时间获取所述第一距离;
[0010]
所述第二距离传感器包括第二发光二极管和第二光敏三极管,所述第二发光二极管用于朝所述可调平面发射光信号,光信号经所述可调平面反射后到达所述第二光敏三极管,所述第二距离传感器根据光信号从所述第二发光二极管到达所述第二光敏三极管的传播时间获取所述第二距离。
[0011]
在其中一个实施例中,所述第一距离传感器包括第一发光二极管和第一光敏三极管,所述第一发光二极管用于朝所述基准平面发射光信号,光信号经所述基准平面反射后到达所述第一光敏三极管,所述第一距离传感器根据光信号从所述第一发光二极管到达所述第一光敏三极管的传播时间获取所述第一距离;
[0012]
所述第二距离传感器包括第二发光二极管和第二光敏三极管,所述第二发光二极管用于朝所述可调平面发射光信号,光信号经所述可调平面反射后到达所述第二光敏三极管,所述第二距离传感器根据光信号从所述第二发光二极管到达所述第二光敏三极管的传播时间获取所述第二距离。
[0013]
在其中一个实施例中,还包括:
[0014]
控制组件,分别与所述第一距离传感器和所述第二距离传感器通讯连接,用于获取所述第一距离和所述第二距离,并根据所述第一距离和所述第二距离以及所述第一距离传感器和所述第二距离传感器在第一方向上的参考相对距离,判定所述可调平面和所述基准平面的相对位置。
[0015]
在其中一个实施例中,所述控制组件与所述基底相互独立,所述检测工具还包括:
[0016]
讯号传感组件,所述第一距离传感器和所述第二距离传感器通过所述讯号传感组件与所述控制组件无线通讯连接。
[0017]
在其中一个实施例中,所述控制组件还用于与调节所述可调平面高度的调节机构通讯连接,所述控制组件用于:
[0018]
当所述可调平面高于所述基准平面时,控制调节机构使所述可调平面下降,直至所述可调平面与所述基准平面齐平;
[0019]
当所述可调平面低于所述基准平面时,控制调节机构使所述可调平面上升,直至所述可调平面与所述基准平面齐平。
[0020]
在其中一个实施例中,所述基准平面为静电卡盘的上表面,所述静电卡盘边缘围设有聚焦环,所述可调平面为所述聚焦环的上表面。
[0021]
在其中一个实施例中,所述可调平面的n处不同区域分别由n个调节机构控制,所述基底内集成有n个所述第二距离传感器,每一所述第二距离传感器用于检测所述可调平面一处区域与对应的第二距离传感器之间的第二距离,n≥2;
[0022]
所述控制组件分别与n个调节机构通讯连接,用于根据各第二距离传感器测得的第二距离判定可调平面对应区域与基准平面的相对位置,并通过对应区域的调节机构调节对应区域的高度。
[0023]
在其中一个实施例中,还包括:
[0024]
充电基座,与所述基底相互独立,所述充电基座内集成有第一充电电路,所述第一充电电路包括电源接口、串联于电源接口两端的过载保护装置和初级线圈、以及与所述初级线圈并联的第一电容;
[0025]
电池和第二充电电路,集成于所述基底内,所述电池与所述第一距离传感器和所述第二距离传感器电连接以为所述第一距离传感器和所述第二距离传感器提供工作电源;所述第二充电电路包括串联于所述电池两端的次级线圈和充电二极管、以及与所述次级线圈并联的第二电容,当所述基底置于所述充电基座上时,所述次级线圈与所述初级线圈产生电磁感应而获取电流,实现所述充电基座对所述电池的无线充电。
[0026]
在其中一个实施例中,所述基底为虚拟晶圆,所述检测工具还包括:
[0027]
晶圆传送盒,所述充电基座设于所述晶圆传送盒内,所述晶圆传送盒用于装载所述基底。
[0028]
在其中一个实施例中,所述基准平面和所述可调平面位于工艺腔室内,所述工艺腔室具有传送窗口,所述基底为虚拟晶圆,所述检测工具还包括:
[0029]
机械手,用于通过所述传送窗口将所述基底传送进所述工艺腔室,以及通过所述传送窗口将所述基底移出所述工艺腔室。
[0030]
一种平面相对位置检测方法,用于检测相互平行的可调平面与基准平面的相对高度,包括:
[0031]
在所述基准平面和可调平面的同侧设置第一参考点和第二参考点;
[0032]
检测沿第一方向,所述第一参考点与所述基准平面之间的第一距离,以及所述第二参考点与所述可调平面之间的第二距离,所述第一方向是与所述基准平面垂直的方向;及
[0033]
获取所述第一距离和所述第二距离,并根据所述第一距离和所述第二距离以及所述第一参考点和所述第二参考点在第一方向的参考相对位置,判定所述可调平面和所述基准平面的相对位置。
[0034]
上述平面相对位置检测方法,设置第一参考点和第二参考点,第一参考点与第二参考点在第一方向上的参考相对距离已知,检测第一距离,实际是检测第一参考点与基准平面的垂直距离,当可调平面与基准平面平面时,检测第二距离,实际是检测第二参考点与可调平面的垂直距离。根据获取到第一距离、第二距离和参考相对距离,便能获知可调平面与基准平面在第一方向上的相对位置关系。
[0035]
在其中一个实施例中,所述可调平面通过调节机构调节高度,在所述判定所述可调平面和所述基准平面的相对位置后,所述方法还包括:
[0036]
当所述可调平面高于所述基准平面时,控制调节机构使所述可调平面下降,直至所述可调平面与所述基准平面齐平;
[0037]
当所述可调平面低于所述基准平面时,控制调节机构使所述可调平面上升,直至所述可调平面与所述基准平面齐平。
[0038]
在其中一个实施例中,在所述基准平面和可调平面的同侧设置第一参考点和第二参考点,包括:在所述基准平面和可调平面的同侧设置一基底,所述基底上集成有第一距离传感器和第二距离传感器,以所述第一距离传感器的位置作为第一参考点,以第二距离传感器的位置作为第二参考点;
[0039]
所述检测沿所述第一方向,所述第一参考点与所述基准平面之间的第一距离,以及所述第二参考点与所述可调平面之间的第二距离,包括:通过所述第一距离传感器检测沿所述第一方向,所述第一参考点与所述基准平面之间的第一距离,通过所述第二距离传感器检测沿所述第一方向,所述第二参考点与所述可调平面之间的第二距离。
[0040]
在其中一个实施例中,所述基准平面和所述可调平面均位于工艺腔室内,所述工艺腔室具有传送窗口,所述基底为虚拟晶圆;
[0041]
在所述基准平面和可调平面的同侧设置一基底,包括:利用机械手,通过所述传送窗口,将所述基底传送进所述工艺腔室并置于所述基准平面和可调平面的同侧;
[0042]
在检测完成后,所述检测方法还包括:利用机械手,通过所述传送窗口,将所述基底移出所述工艺腔室。
附图说明
[0043]
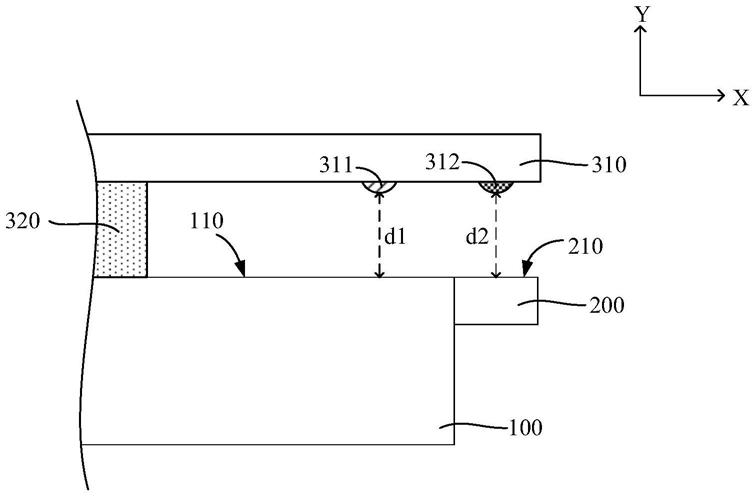
图1为本申请一实施例中平面相对位置检测工具的检测状态图;
[0044]
图2为本申请一实施例中第一距离传感器的工作原理图;
[0045]
图3为本申请一实施例中平面相对位置检测工具的结构示意图;
[0046]
图4为本申请一实施例中平面相对位置检测工具内部组件的连接关系图;
[0047]
图5为本申请一实施例中第一距离传感器和第二距离传感器的位置分布图;
[0048]
图6a为本申请一实施例中可调平面与基准平面的相对位置关系图;
[0049]
图6b为本申请另一实施例中可调平面与基准平面的相对位置关系图;
[0050]
图7为本申请一实施例中平面相对位置检测工具充电电路图;
[0051]
图8为本申请一实施例中平面相对位置检测工具检测步骤流程图。
[0052]
符号说明
[0053]
100静电卡盘;110基准平面;200聚焦环;300基底;310平板结构;311第一距离传感器;312第二距离传感器;313第二充电电路;314电池;315讯号传感组件;320支撑座;400控制组件;500调节机构;600第一充电电路。
具体实施方式
[0054]
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述。附图中给出了本发明的首选实施例。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
[0055]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
[0056]
如图1所述,基准平面110和可调平面210为需要对准的两个平面,定义与基准平面110垂直的方向为第一方向,即图示y方向,与y方向垂直的方向为x方向。平面相对位置检测工具包括基底(图中未标出)和集成于基底内的第一距离传感器311与第二距离传感器312,第一距离传感器311用于检测沿y方向,第一距离传感器311与基准平面110之间的第一距离d1,该第一距离d1代表从第一距离传感器311,沿y方向到达基准平面110的路程;第二距离传感器312用于检测沿y方向,第二距离传感器312与可调平面210之间的第二距离d2,该第二距离d2代表从第二距离传感器312,沿y方向到达可调平面210的路程。
[0057]
在本申请中,以第一距离传感器的位置为第一参考点,以第二距离传感器的位置为第二参考点,在测量过程中,第一参考点和第二参考点在y方向上的参考相对距离已知,第一参考点和第二参考点在y方向上的参考相对距离指的是在以y方向为y轴的同一坐标系中,第一参考点的y坐标和第二参考点的y坐标的差值,定义该参考相对距离为d3。由于y方向垂直于基准平面,第一距离传感器测得的第一距离d1,实际是第一参考点与基准平面之间的垂直距离,当可调平面平行于基准平面时,第二距离传感器测得的第二距离d2,实际是
第二参考点与可调平面之间的垂直距离。在获取到第一距离d1、第二距离d2后,便可根据第一距离d1、第二距离d2和参考相对距离d3判定相互平行的可调平面与基准平面的相对高度关系,具体为:
[0058]
当d1<d2+d3时,说明可调平面低于基准平面;
[0059]
当d1>d2+d3时,说明可调平面高于基准平面;
[0060]
当d1=d2+d3时,说明可调平面与基准平面齐平。
[0061]
在一实施例中,在检测过程中,第一距离传感器311和第二距离传感器312处于与基准平面110平行的同一水平面上,即第一距离传感器311和第二距离传感器312在y方向上的参考相对距离d3为0,此时,可直接根据第一距离d1和第二距离d2判定相互平行的基准平面与可调平面之间的相对高度关系,具体为:
[0062]
当d1<d2时,说明可调平面低于基准平面;
[0063]
当d1>d2时,说明可调平面高于基准平面;
[0064]
当d1=d2时,说明可调平面与基准平面齐平。
[0065]
在一实施例中,如图2所示,第一距离传感器311包括第一发光二极管q1和第一光敏三极管q2,其中,第一发光二极管q1用于朝基准平面110发射光信号,光信号经基准平面110反射后到达第一光敏三极管q2,第一距离传感器311根据光信号从第一发光二极管q1到达第一光敏三极管q2的传播时间得到第一距离。同理,第二距离传感器包括第二发光二极管和第二光敏三极管,第二发光二极管用于朝可调平面发射光信号,光信号经可调平面反射后到达第二光敏三极管,第二距离传感器根据光信号从第二发光二极管到达第二光敏三极管的传播时间获取第二距离。
[0066]
在一实施例中,位于便于操作,对基底的形状进行了进一步限定,结合图1和图3,基底300包括底部的支撑座320和形成于支撑座上的平板结构310,在垂直于平板结构310平面的方向上,平板结构310的覆盖面积大于支撑座320的覆盖面积,第一距离传感器311和第二距离传感器312集成于平板结构310未被支撑座320覆盖的区域内。在本实施例中,设置支撑座320,在测量时,基底通过支撑座320支撑于基准平面110上,便可进行检测。在一实施例中,为了使支撑座320平稳地支撑平板结构310,将支撑座320设于平板结构310的中心区域。在一实施例中,当支撑座320置于水平面上时,第一距离传感器311和第二距离传感器312位于同一水平面上,由此使得,当支撑座320置于基准平面110上进行检测时,第一距离传感器311和第二距离传感器312在y方向上的参考相对距离d3为0。可以理解的,当支撑座320支撑于基准平面110上时,第一距离传感器311位于基准平面110沿y方向的覆盖区域内,第二距离传感器312位于可调平面210沿y方向的覆盖区域内。
[0067]
当检测工具测得第一距离和第二距离时,可人工分析出可调平面与基准平面的相对高度,也可进行自动分析。在一实施例中,如图4所示,上述检测工具还包括控制组件400,控制组件400分别与第一距离传感器311和第二距离传感器312通讯连接,用于获取第一距离d1和第二距离d2,并根据第一距离d1、第二距离d2和参考相对距离d3判定可调平面210和基准平面110的相对高度,具体判断逻辑已在上文介绍,在此不再赘述。通过控制组件400自动完成分析过程,并将直接显示分析结果,使得操作更加智能化。进一步的,控制组件400设于基底300外并与基底300相互独立,具体可为一电脑终端,检测工具还具有一讯号传感组件315,讯号传感组件310具体可集成于基底300内,第一距离传感器311和第二距离传感器
312分别与讯号传感组件315连接,并通过讯号传感组件315与控制组件400无线通讯连接。
[0068]
在一实施例中,可调平面210可以通过调节机构调节高度,该调节机构具体可为步进电机,如图4所示,当检测工具具有控制组件400时,控制组件400还与调节机构500通讯连接,用于根据判定结果控制调节机构,从而调节可调平面210的上升与下降,使可调平面210与基准平面110的相对高度处于目标范围内。在本实施例中,检测工具与调节机构连接,可以在可调平面位置出现偏差时,自动控制调节机构,继而对可调平面的位置进行矫正。在一实施例中,当需要可调平面210与基准平面110齐平时,控制组件400对调节机构的控制具体为:
[0069]
当可调平面210高于基准平面110时,控制调节机构使可调平面210下降,直至可调平面与基准平面齐平;
[0070]
当可调平面210低于基准平面110时,控制调节机构使可调平面210上升,直至可调平面210与基准平面110齐平。
[0071]
在一实施例中,上述基准平面110为静电卡盘100的上表面,静电卡盘100边缘围设有聚焦环200,可调平面210为聚焦环200的上表面。当聚焦环200套设在静电卡盘100边缘时,理想状态下,聚焦环200的上表面与静电卡盘100的上表面平面,即可调平面210与基准平面110平行。然而,在实际中,会出现以下两种异常情况:
[0072]
第一种异常情况是组装异常,即聚焦环的组装时,其上表面与静电卡盘的上表面并未对齐,会出现聚焦环的上表面与静电卡盘的上表面平行但不齐平,聚焦环的上表面整体高于或低于静电卡盘的上表面,或者如图6a所示,聚焦环套设在静电卡盘边缘时,聚焦环可能会出现倾斜,即可调平面210与基准平面110并不平行而导致可调平面210上不同区域与基准平面110的相对位置关系并不相同,如图6a中的a区域高于基准平面110,而b区域则低于基准平面110。第二种异常是使用异常,即在组装时,聚焦环的上表面与静电卡盘的上表面齐平,但是在长期使用过程中,聚焦环经长期的等离子体轰击后,会导致聚焦环上表层被消耗,如图6b所示,聚焦环的上表面低于静电卡盘上表面,即可调平面210低于基准平面110。无论是第一种异常还是第二种异常,均可通过上述检测检测可调平面210和基准平面110的相对高度,然后根据检测结果控制调节机构,从而提升可调平面210的高度。具体的,可调平面可通过一个调节机构调节高度,也可通过多个调节机构调节高度。在一具体实施例中,当可调平面通过多个调节机构调节高度时,可调平面可划分为n处不同的区域,n≥2,每处区域由一个独立的调节机构控制,相应的,检测工具中,如图5所示,基底300内集成有n个第二距离传感器312,每一个第二距离传感器312检测可调平面210的一处区域,n处区域与n个第二传感器一一对应;控制组件400分别与各第一距离传感器311、各第二距离传感器312和各调节机构500通讯连接,用于根据各第二距离传感器312测得的第二距离判定各可调平面210对应区域与基准平面110的相对位置关系,并通过对应区域的调节机构500调节对应区域的高度。在本实施例中,通过多个调节机构共同调节可调平面210的高度,使得可调平面的升降更加平稳。同时,针对可调平面出现倾斜的情况,若仅检测可调平面210一处区域的第二距离,矫正后的可调平面210和基准平面110仍具有偏差,通过设置多个调节机构和多个第二距离传感器,可以检测可调平面多处区域与基准平面的相对位置关系并独立控制各处区域的升降,能够提高矫正精度,实现聚焦环上表面与静电卡盘上表面的精确对准。进一步的,n个调节机构均匀分布于基底的同心圆环轨道上,由此将可调平面均匀分为n
个区域,进一步提高矫正精度,其中,n可取2或3或4。
[0073]
在一实施例中,当基底内集成有n个第二距离传感器时,第一距离传感器的个数可为1个,也可为n个,当基底内仅集成一个第一距离传感器时,n个第二距离传感器测得的第二距离均与同一个第一距离传感器测得的第一距离比较,当基底内集成有n个第一距离传感器时,每一第二距离传感器附近设置一个第一距离传感器,在进行分析时,将第二距离传感器测得的第二距离和与之相邻的第一距离传感器测得的第一距离进行比较。由于静电卡盘经长期的等离子体轰击后,会导致不同区域的厚薄程度不同,即基准平面110有些区域可能并不平整。在本实施例中,设置多组第一距离传感器,一方面可以反映静电卡盘上表面的平整程度,另一方面也有利于提高矫正精度。进一步的,各第一距离传感器均匀分布于第一同心圆环轨道上,其轨道直径为φ1,各第二距离传感器也均匀分布于第二同心圆环轨道上时,其轨道直径为φ2,φ2>φ1,第一同心圆环轨道和第二同心圆环轨道的圆心相同,且相邻的第一距离传感器311和第二距离传感器312处于同一直径上。
[0074]
在一实施例中,如图7所示,检测工具还包括充电基座,与基底300相互独立,所述充电基座内集成有第一充电电路600,第一充电电路600包括电源接口、串联于电源接口两端的过载保护装置r1和初级线圈l1,以及与初级线圈并联的第一电容c1。同时,基底300内还集成有连接的第二充电电路313和电池314,具体的,第二充电电路313包括串联于电池314两端的次级线圈l2和充电二极管d1,以及与次级线圈l2并联的第二电容c2,其中,当基底300置于充电基座上时,基底300内的次级线圈l2和充电基座内的初级线圈l1产生电磁感应而使次级线圈l2生成电流,实现充电基座对电池314的无线充电,在电池314内储蓄电量。结合图4所示,电池314与第一距离传感器311、第二距离传感器312连接,以为第一距离传感器311和第二传感器312提供工作电源。进一步的,当基座内集成有讯号传感组件315时,电池314还与该讯号传感组件315连接以为其提供工作电源。
[0075]
在一实施例中,基底300为虚拟晶圆,此处的虚拟晶圆指的是形貌类型晶圆的基底,即基底的厚度和尺寸与真实晶圆类似,上述检测工具还包括晶圆传送盒,由于基底300设计成虚拟晶圆的形式,因此,基底300可放置在晶圆传送盒内,即当基底300不进行检测时,将基底300置于晶圆传送盒内。进一步,上述充电基座设于晶圆传送盒内,当基底300置于晶圆传送盒内时,可基底内部电池可通过充电基座进行无线充电。
[0076]
在一具体实施例中,基准平面110和可调平面210均位于工艺腔内,如基准平面110具体为静电卡盘的上表面,可调平面210具体为聚焦环的上表面,上述基底300为晶圆,检测工具还包括机械手,用于在需要进行检测时将基底300传送进工艺腔室,当检测完后,将基底300移除工艺腔室。半导体制程的刻蚀或离子注入工艺等均是在密闭的工艺腔室中进行,工艺腔室具有专门传送硅片的传送窗口,通过机械手实现目标硅片在窗口处的传送。在本实施例中,检测工具的基底为虚拟晶圆,该虚拟晶圆的形貌与通过上述窗口传送的真实晶圆的形貌类似,因此,机械手也可以抓取基底300,当需要进行检测时,通过工艺腔室的传送窗口将基底300送入工艺腔室,当完成检测时,通过工艺腔室的传送窗口将基底300移出工艺腔室。已知的设备组件平面检测过程首先需要将设备反应腔体拆解开,然后在聚焦环和静电卡盘上放入检测工具,根据检测工具的表盘读数判断水平面的对准情况,从而调整聚焦环的位置。上述设备组件平面检测的过程需要拆解机台,过程繁琐,耗时费力。在本实施例中,采用虚拟晶圆作为基底,利用机械手抓取基底,可通过工艺腔室用于传送硅片的窗口
传送基底,不用打开腔室的顶盖,节省大量的成本。进一步的,当基底未用于检测时,该基底具体是置于晶圆传送盒内,晶圆传送盒内设有充电基座,当需要检测时,机械手具体是从晶圆传送盒内抓取基底,当检测完成时,机械手将基底送回晶圆传送盒,并通过晶圆传送盒对基底电池进行充电。
[0077]
本申请还涉及一种平面相对位置检测方法,用于检测相互平行的可调平面和基准平面的相对高度,如图1所示,需要将可调平面210与基准平面110对准,如图8所示,该检测方法包括:
[0078]
步骤s810:在所述基准平面和可调平面的同侧设置第一参考点和第二参考点。
[0079]
如图1所示,在基准平面110和可调平面210的同侧设置第一参考点和第二参考点,如第一参考点和第二参考点均设于基准平面110和可调平面210的上方。
[0080]
步骤s820:检测沿第一方向,所述第一参考点与所述基准平面之间的第一距离,以及所述第二参考点与所述可调平面之间的第二距离,所述第一方向是与所述基准平面垂直的方向。
[0081]
其中,定义所述第一方向为图中y方向,第一参考点与基准平面110之间的第一距离,指的是沿y方向,从第一参考点到达基准平面110的路程,实际为第一参考点与基准平面110之间的垂直距离;沿y方向,第二参考点与可调平面210之间的第二距离,指的是沿y方向,从第二参考点到达可调平面210的路程,当可调平面210与基准平面平行时,第二距离实际为第二参考点与可调平面210之间的垂直距离。需要说明的是,在检测时,第一参考点与第二参考点在y方向的参考相对位置已知,该参考相对位置指的是在同一坐标系中,第一参考点的y坐标与第二参考点的y坐标的差值,定义该参考相对距离为d3。
[0082]
在一实施例中,如图1所示,在基准平面和可调平面的同侧设置第一参考点和第二参考点,包括:在基准平面110和可调平面210的同侧设置一基底,基底上集成有第一距离传感器311和第二距离传感器312,以第一距离传感器311的位置作为第一参考点,以第二距离传感器312的位置作为第二参考点。此时,检测第一距离具体为:通过第一距离传感器311检测沿第一方向,第一距离传感器311与基准平面110之间的第一距离d1;检测第二距离具体为:通过第二距离传感器312检测沿第一方向,第二距离传感器312与可调平面210之间的第二距离d2。
[0083]
步骤s830:获取所述第一距离和所述第二距离,并根据所述第一距离和所述第二距离以及所述第一参考点和所述第二参考点在第一方向的参考相对位置,判定所述可调平面和所述基准平面的相对位置。
[0084]
在获取到第一距离d1、第二距离d2后,便可根据第一距离d1、第二距离d2和参考相对距离d3判定相互平行的可调平面210与基准平面110之间的相对高度,具体为:
[0085]
当d1<d2+d3时,说明可调平面低于基准平面;
[0086]
当d1>d2+d3时,说明可调平面高于基准平面;
[0087]
当d1=d2+d3时,说明可调平面与基准平面齐平。
[0088]
在一实施例中,在检测过程中,第一参考点和第二参考点处于与基准平面110平行的同一水平面上,即第一参考点和第二参考点在y方向上的参考相对距离d3为0,此时,可直接根据第一距离d1和第二距离d2判定相互平行的基准平面与可调平面之间的相对高度关系,具体为:
[0089]
当d1<d2时,说明可调平面低于基准平面;
[0090]
当d1>d2时,说明可调平面高于基准平面;
[0091]
当d1=d2时,说明可调平面与基准平面齐平。
[0092]
在一实施例中,上述基准平面110和可调平面210位于工艺腔室内,如基准平面110可为静电卡盘100的上表面,可调平面210可为聚焦环200的上表面,聚焦环200具体围设于静电卡盘的边缘处。为了便于在不打开腔室顶盖的前提下将基底送入工艺腔室内,选用虚拟晶圆作为基底,此时,在基准平面110和可调平面210的同侧设置一基底,包括:利用机械手,通过工艺腔室的传送窗口,将基底传送进工艺腔室并置于基准平面110和可调平面210的同侧。同时,在检测完成后,还可以同样的方式,利用机械手,通过工艺腔的传送窗口,将基底移出工艺腔室。
[0093]
在一实施例中,可调平面210通过调节机构调节其高度,在步骤s830之后,还包括:
[0094]
步骤s840:根据判定结果控制所述调节机构,使所述可调平面与基准平面的相对高度处于目标范围内。
[0095]
在一实施例中,当需要可调平面210与基准平面110齐平时,对调节机构的控制具体为:
[0096]
当可调平面210高于基准平面110时,控制调节机构使可调平面210下降,直至可调平面与基准平面齐平;
[0097]
当可调平面210低于基准平面110时,控制调节机构使可调平面210上升,直至可调平面210与基准平面110齐平。
[0098]
在本实施例中,当可调平面位置出现偏差时,可以自动控制调节机构,继而对可调平面的位置进行矫正。
[0099]
以上实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1