通过融合天线集合的测量的雷达成像的制作方法
1.本公开总体上涉及雷达系统,更具体地,涉及通过将具有同步或异步时钟的各种天线的测量融合的雷达成像。
背景技术:
2.高分辨率雷达成像是包括合成孔径雷达(sar)和穿墙雷达成像(twi)的各种遥感应用的要求。尽管下程分辨率主要由发送脉冲的带宽控制,横程(方位角)分辨率取决于雷达阵列的孔径。生成大物理孔径实际上通过部署各自具有相对小的孔径的多个分布式天线或阵列来实现。分布式设置允许平台放置的灵活性,降低运营和维护成本,并且增加对传感器故障的鲁棒性。利用场景的先验知识(例如,稀疏性),天线位置的精确知识和所接收信号的完全同步已被证明显著改进雷达成像分辨率。然而,由于天线位置的不明确和/或天线时钟难以精确同步,阵列的地理分布引入了数据相干性问题。
3.例如,现有技术将异步时钟建模为所接收数据中的相位误差。实际上,由于时钟漂移而引入的时间延迟等同于频率上线性的相移。为此,传统方法尝试估计和校正数据中的相位误差,以便对校正的数据应用相干成像技术。参见例如d.e.wahl、p.h.eichel、d.c.ghiglia和c.v.jakowatz的“phase gradient autofocus
‑
a robust tool for high resolution sar phase correction”(ieee transactions on aerospace and electronic systems,第30卷第3期,第827
‑
835页,1994年)。然而,这些解决方案的常见问题在于,由于所得表述的非线性和相位缠绕的附加复杂性,相位误差的估计并不简单。此外,文献中的典型相位模型(例如,子空间限制)常常表现不佳,因为它们未能捕捉误差的真正性质。结果,那些解决方案不切合实际。
4.因此,需要配置用于将具有异步时钟的各种天线的测量融合的雷达成像系统和方法。
技术实现要素:
5.一些实施方式的目的在于提供通过将各种天线的测量融合来进行雷达成像的系统和方法。一些实施方式的另一目的在于提供这样一种系统或方法,其适合于从由具有时钟模糊度的天线提供的测量进行雷达成像。如本文所使用的,时钟模糊度指示天线的时钟可同步或者可不同步,天线可为同步的或异步的。当天线具有时钟模糊度时,一些实施方式在天线具有异步时钟的假设下作用。
6.一些实施方式基于这样的认识:具有时钟模糊度的分布式天线的雷达成像问题可为具有大量未知元的不适定问题。具体地,当雷达成像问题被表述为通过对时钟模糊度编码具有不确定性的雷达算子(radar operator)从与雷达图像有关的测量确定雷达图像时,未知场景的各个测量包括由天线的异步时钟导致的误差。此外,由于测量与天线时钟的误差之间的关系的非线性,来自同一天线的测量的各个样本可具有不同的误差,从而增加了由来自多个天线的多个测量形成的雷达成像问题的模型中的未知元的数量。为此,旨在从
由不正确雷达算子导致的不正确测量恢复正确雷达图像的雷达成像问题的表述是非凸且困难的不适定问题。
7.一些实施方式基于这样的认识:雷达图像恢复的原始问题是寻找未知场景的延迟未知理想信号来说明雷达测量。此问题是非凸的。然而,一些实施方式将此问题反转以确定将与未知理想信号匹配的雷达测量的提前(或反向延迟)。这种问题变换允许将未知延迟与生成未知理想信号的未知场景解耦。
8.另外,一些实施方式基于这样的认识:作为所接收信号在时间上的未知移位,未知提前可被表示为与未知脉冲的卷积。这种表示是违反直觉的,因为扩大了问题的维度。然而,未知提前以非线性方式影响数据,而通过未知脉冲的卷积是线性运算。以这种方式,与从卷积表示获得的线性化组合的未知元的解耦导致凸雷达图像恢复问题。
9.然而,即使在凸化之后,此问题仍难以求解,因为所得凸问题具有大量的最优解,而它们中仅有一个是期望的解。然而,一些实施方式基于另一认识:未知脉冲可被表示为未知信号,即,时间上单稀疏的移位内核。实际上,这些认识允许将原始非凸图像恢复问题转变为凸稀疏恢复问题,这继而允许使用稀疏重构技术以减小雷达图像恢复问题的解空间的大小。
10.为此,一些实施方式求解凸雷达图像恢复问题以生成场景的雷达图像。雷达图像恢复问题使场景的从具有时钟模糊度的多个天线收集的雷达测量的提前与通过场景的雷达传播函数生成的信号匹配。雷达测量的提前被表示为雷达测量与时间上单稀疏的移位内核的卷积,使得凸雷达图像恢复问题是以稀疏约束为条件求解的凸稀疏恢复问题。
11.因此,一个实施方式公开了一种用于生成场景的雷达图像的雷达系统,该雷达系统包括:输入接口,其接受场景的从具有时钟模糊度的天线集合收集的雷达测量,其中,雷达测量是发送到场景的雷达脉冲的反射的测量;硬件处理器,其被配置为求解凸稀疏恢复问题以生成场景的雷达图像,其中,该凸稀疏恢复问题使雷达测量的时间移位与雷达脉冲通过场景的雷达传播函数的传播而生成的信号匹配,其中,雷达测量的时间移位被表示为雷达测量与时间上单稀疏的移位内核的卷积;以及输出接口,其被配置为渲染雷达图像。
12.另一实施方式公开了一种用于生成场景的雷达图像的雷达方法,其中,该方法使用与所存储的实现该方法的指令耦合的处理器,其中,所述指令在由处理器执行时执行该方法的步骤,该方法包括:接受场景的从具有时钟模糊度的天线集合收集的雷达测量,其中,雷达测量是发送到场景的雷达脉冲的反射的测量;求解凸稀疏恢复问题以生成场景的雷达图像,其中,该凸稀疏恢复问题使雷达测量的时间移位与雷达脉冲通过场景的雷达传播函数的传播而生成的信号匹配,其中,雷达测量的时间移位被表示为雷达测量与时间上单稀疏的移位内核的卷积;以及渲染雷达图像。
13.另一实施方式公开了一种具体实现有程序的非暂时性计算机可读存储介质,该程序可由处理器执行以用于执行一种方法。该方法包括:接受场景的从具有时钟模糊度的天线集合收集的雷达测量,其中,雷达测量是发送到场景的雷达脉冲的反射的测量;求解凸稀疏恢复问题以生成场景的雷达图像,其中,该凸稀疏恢复问题使雷达测量的时间移位与雷达脉冲通过场景的雷达传播函数的传播而生成的信号匹配,其中,雷达测量的时间移位被表示为雷达测量与时间上单稀疏的移位内核的卷积;以及渲染雷达图像。
14.当前公开的实施方式将参照附图进一步进行说明。所示的附图未必按比例,相反
通常着重于示出当前公开的实施方式的原理。
附图说明
15.[图1a]图1a示出根据一些实施方式的雷达系统的框图。
[0016]
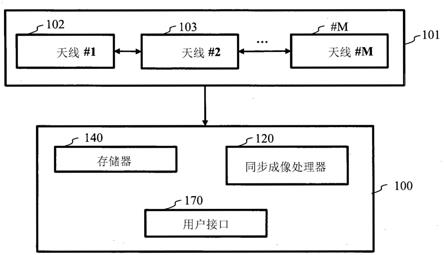
[图1b]图1b是根据一些实施方式的图1a的雷达系统与被配置为收集场景的雷达测量的具有时钟模糊度的天线集合之间的协作的框图。
[0017]
[图1c]图1c是示出根据一些实施方式的具有用于检测感兴趣区域(roi)中的目标的移动雷达天线的分布式阵列的至少一个系统和方法的示意图。
[0018]
[图1d]图1d是示出根据一些实施方式的分布式移动雷达成像系统中的时间移位的示意图。
[0019]
[图1e]图1e是示出根据一些实施方式的由于各个雷达时钟中的误差而影响各个天线的测量的时域信号的失真的示意图。
[0020]
[图1f]图1f是示出根据一些实施方式的由于各个雷达时钟中的误差而影响各个天线的测量的时域信号的失真的示意图。
[0021]
[图2a]图2a是展示一些实施方式所使用的时钟误差对记录信号的时间戳的影响的示例的示意图。
[0022]
[图2b]图2b是展示根据另一实施方式的时钟误差对所发送信号的时间戳的影响的另一示例的示意图。
[0023]
[图2c]图2c是展示根据一些实施方式的发送机和接收机本地时钟二者处的时钟误差的影响的示例的示意图。
[0024]
[图3a]图3a是示出根据一些实施方式的在计算机中可如何将延迟表示为单个系数或等效地表示为移位内核的示意图。
[0025]
[图3b]图3b是示出一些实施方式所使用的由于时钟误差而移位的记录信号与如果没有时钟误差将记录的信号之间的关系的示意图。
[0026]
[图4]图4示出一些实施方式所使用的凸稀疏恢复问题的组件的示意图。
[0027]
[图5]图5示出根据一些实施方式的将图4的组件变换为所得频域模型的示意图。
[0028]
[图6a]图6a示出根据一些实施方式的将图5的所得频域模型离散化的示意图。
[0029]
[图6b]图6b示出根据一些实施方式的矩阵形式的凸稀疏恢复问题的示例表述。
[0030]
[图6c]图6c示出根据一个实施方式的求解凸稀疏恢复问题的伪代码。
[0031]
[图7]图7是根据一些实施方式的本公开可以想到的雷达系统的计算机系统的框图。
具体实施方式
[0032]
本公开的各种实施方式涉及通过将具有未知定时误差的各种天线的测量融合来进行雷达成像的系统和方法。例如,本公开基于这样的认识:具有定时误差的分布式天线的雷达同步问题可为具有大量未知元的不适定问题。具体地,当雷达成像问题被表述为通过对定时误差编码具有不确定性的雷达算子从与雷达图像有关的测量确定雷达图像时,雷达系统的感兴趣区域(roi)的各个测量包括由定时误差导致的误差。此外,由于测量与定时误差之间的关系的非线性以及多个可能的发送天线和接收天线,来自各个发送机和接收机天
线对的各个测量集合可能表现出不同的定时误差,从而增加了由来自多个天线的多个测量形成的雷达自动聚焦问题的模型中的未知元的数量。为此,雷达同步问题的表述旨在从不正确雷达算子所导致的不正确测量恢复正确的雷达图像,这是困难的。
[0033]
一些实施方式基于这样的认识:对于分布式雷达系统,当以各个雷达发送机或接收机的本地时钟表示时,导致同步问题的时钟或定时不匹配表现为所发送或接收的信号的时间移位。例如,如果雷达发送机时钟运行快,即,其本地时钟在全局参考时钟之前特定持续时间达到特定时间戳,则该雷达发送机将发送与如果雷达发送机的本地时钟与全局参考时钟同步的话将发送的信号相比提前了相同持续时间的信号。类似地,如果雷达发送机时钟运行慢,即,其本地时钟在全局参考时钟之后特定持续时间达到特定时间戳,则该雷达发送机将发送与如果雷达发送机的本地时钟与全局参考时钟同步的话将发送的信号相比延迟了相同持续时间的信号。
[0034]
对于系统中的接收机雷达适用反关系。例如,如果雷达接收机时钟运行很快,即,其本地时钟在全局参考时钟之前特定持续时间达到特定时间戳,则该雷达接收机将测量具有与如果雷达发送机的本地时钟与全局参考时钟同步的话将测量的信号相比延迟了相同持续时间的本地时间戳的信号。类似地,如果雷达接收机时钟运行慢,即,其本地时钟在全局参考时钟之后特定持续时间达到特定时间戳,则该雷达接收机将测量具有与如果雷达发送机的本地时钟与全局参考时钟同步的话将测量的信号相比提前了相同持续时间的本地时间戳的信号。
[0035]
此外,一些实施方式依赖于这样的认识:接收机处的测量的时间戳根据发送由接收机反射和接收的脉冲的发送机的时钟误差和该接收机的时钟误差二者移位。例如,如果雷达发送机时钟运行慢了特定持续时间并且雷达接收机时钟运行快了不同的持续时间,则雷达接收机将测量具有与如果发送机和接收机本地时钟二者与全局参考时钟同步的话将测量的信号相比延迟了两个不同持续时间之和的本地时间戳的信号。因此,对于各个雷达发送机
‑
接收机对,确定与其时钟误差对应的相对移位就足够了。通过仅确定各个雷达发送机
‑
接收机对的相对移位,而非各个雷达发送机和接收机分别的移位,可将各个测量集合的问题解耦,因为仅单个相对移位影响各个测量集合,而非两个,并且该相对移位仅影响与单个雷达发送机
‑
接收机对对应的测量。这种解耦使得能够表述可有效求解的凸问题。
[0036]
一些实施方式基于这样的认识:从不正确雷达算子所导致的不正确测量恢复正确雷达图像的雷达同步问题可被重新表述为从正确测量和正确雷达算子恢复不正确雷达图像。一方面,这种重新表述没有意义。然而,一些实施方式认识到,经由雷达同步问题的这种表述确定的不正确测量可通过测量的时间移位与正确雷达测量相关,其中时间移位由各个天线的不同步时钟之间的不匹配确定。此外,一些实施方式认识到,时间移位可被表达为与移位内核的卷积。由于时钟不匹配相同,所以来自同一发送
‑
接收天线对的各个测量使用相同的线性移位内核移位。当然,来自不同发送机
‑
接收机天线对的测量对应于正确测量的不同移位,但是本公开表述仍可显著减少雷达同步问题中的未知元的数量,从而允许使用不同技术以有效方式求解该问题。
[0037]
例如,代替试图固定天线的测量,一些实施方式使用那些测量来同时寻找测量的移位和单个雷达图像,使得对于各个发送机
‑
接收机对,当由雷达图像生成的测量移位时,对应移位适合接收机的测量。
[0038]
另外,一些实施方式基于这样的认识:将由雷达图像生成的测量移位并将它们与接收机的测量进行比较等同于将接收机的测量反向移位并将它们与由雷达图像生成的未移位测量进行比较。例如,将由雷达图像生成的测量延迟特定持续时间并且比较延迟的测量是否适合接收机的测量等同于比较由没有延迟的雷达图像生成的测量,并且比较这些测量是否适合提前了相同持续时间的接收机的测量。类似地,将由雷达图像生成的测量提前特定持续时间并且比较它们是否适合接收机的测量等同于比较由没有提前的雷达图像生成的测量,并且比较它们是否适合延迟了相同持续时间的接收机的测量。
[0039]
此外,一些实施方式基于这样的认识:可使用凸优化同时寻找移位和雷达图像。例如,一个实施方式使用凸优化迭代地确定移位集合和雷达图像,直至满足终止条件。例如,实施方式同时更新雷达图像和移位内核以降低作为雷达图像和移位内核的函数的凸成本函数。
[0040]
另外地或另选地,一些实施方式基于这样的认识:移位内核可被表示为时域中的稀疏信号,即,具有非常少的非零系数的信号。在一些实施方式中,移位内核为单稀疏的,即,它们仅具有一个非零系数。例如,一个实施方式确定稀疏或单稀疏的移位内核集合。这种认识减小了未知元的搜索空间并且使问题更容易求解,尽管其可能是欠定的。
[0041]
一些实施方式基于这样的认识:雷达图像可为稀疏的。这是因为图像可包括非常少的反射雷达波的目标。其它实施方式基于这样的认识:雷达图像可具有较低的总变差。这是因为构成图像的一些目标可扩展,而非点目标。例如,一个实施方式确定稀疏的雷达图像。另一实施方式确定总变差较低的雷达图像。第三实施方式确定稀疏并且具有较低总变差的图像。这些认识进一步减小了未知元的搜索空间并且使问题更容易求解,尽管其可能是欠定的。
[0042]
其它实施方式基于这样的认识:可使用正则化确定稀疏或具有较低总变差的解。正则化促进期望的解并惩罚非期望的解,导致更小的解搜索空间并且允许即使原始问题本身欠定也确定解。例如,一些实施方式可使用lasso(即,稀疏正则化)通过包括解的1范数来确定稀疏解。一些实施方式可使用总变差(tv)正则化。一些其它实施方式可使用融合lasso正则化,其包括lasso正则化和tv正则化二者。
[0043]
图1a示出根据一些实施方式的雷达系统100的框图。雷达系统100可具有将系统100与其它系统和装置连接的多个接口。网络接口控制器150适于通过总线106将系统100连接到将雷达系统100与感测装置连接的网络190。例如,雷达系统100包括被配置为命令发送机165发射雷达脉冲的发送机接口160。使用连接到接收机185的接收机接口180,系统100可接收与所发送的脉冲对应的场景的反射。在一些实现方式中,雷达系统100通过网络190接收雷达测量195,雷达测量195是发送到场景的雷达脉冲的反射的测量。
[0044]
雷达系统100包括被配置为渲染重构的雷达图像128的输出接口170。例如,输出接口170可将重构的图像128显示在显示装置上,将图像存储到存储介质中,和/或经由网络发送图像。例如,系统100可通过总线106链接到适于将系统100连接到显示装置(例如,计算机监视器、相机、电视、投影仪或移动装置等)的显示接口。系统100还可连接到适于将系统连接到用于执行各种任务的设备的应用接口。
[0045]
在一些实现方式中,雷达系统100包括输入接口以接收场景的从具有时钟模糊度的天线集合收集的雷达测量。输入接口的示例包括网络接口控制器(nic)150、接收机接口
180和人机接口110a。系统100内的人机接口110a将系统连接到键盘111a和指点装置112a,其中,指点装置112a可包括鼠标、轨迹球、触摸板、操纵杆、指点杆、手写笔或触摸屏等。
[0046]
系统100包括被配置为执行所存储的指令130的处理器120a以及存储可由处理器执行的指令的存储器140。处理器120a可以是单核处理器、多核处理器、计算集群或任何数量的其它配置。存储器140可包括随机存取存储器(ram)、只读存储器(rom)、闪存或任何其它合适的存储器系统。处理器120a可通过总线106连接到一个或更多个输入和输出装置。
[0047]
指令130可实现凸稀疏恢复问题方法以生成场景的雷达图像128。为此,指令包括凸稀疏恢复问题求解器145,其被配置为求解凸稀疏恢复问题以生成场景的雷达图像。如本文中定义的,凸稀疏恢复问题使雷达测量的时间移位与雷达脉冲通过场景的雷达传播函数传播而生成的信号匹配。雷达测量的时间移位被表示为雷达测量与时间上单稀疏的移位内核的卷积。实际上,凸稀疏恢复问题允许将非凸不适定雷达图像恢复问题转变为凸适定问题,这降低了处理器120a的计算要求。
[0048]
为了求解凸稀疏恢复问题,雷达系统100存储附加信息和/或模块以按照有利和/或可解方式表述问题。例如,指令130可存储指示雷达脉冲的传播的数据150。数据150指示用于确定雷达测量的接收机和发送机的硬件实现的物理学。数据150捕捉作为场景的雷达传播函数的环境中发射的雷达脉冲的传播规律。在一些实施方式中,数据150被存储为反映这种传播的正向算子a。不同配置的雷达系统可具有正向算子a的不同值。
[0049]
另外地或另选地,指令130可存储凸稀疏恢复问题表述器135,其被配置为使用雷达数据150和雷达测量195来表述稀疏恢复问题。例如,表述器135可在furrier域中变换所接收的雷达测量,以矩阵形式变换凸稀疏恢复问题以简化解,并且选择各种约束和正则化器并施加于凸稀疏恢复问题的解。
[0050]
图1b是根据一些实施方式的图1a的雷达系统与被配置为收集场景的雷达测量的具有时钟模糊度的天线集合101之间的协作的框图。天线集合101可未同步并且可将所收集的数据存储在由雷达系统100的同步和成像处理器120a处理的存储器140中。处理器140可执行该系统和方法以生成高分辨率雷达图像。成像结果128可通过输出接口170显示。
[0051]
在一些实施方式中,该雷达图像恢复开始于使用一个或多个天线101向感兴趣区域(roi)发送雷达脉冲并且使用不同位置处的天线集合来测量来自与所发送的雷达脉冲对应的roi的反射集合。各个天线测量该天线所特定的roi测量的反射。雷达反射集合可对应于来自指向roi的发送机或来自天线集合中的一些天线的发送信号。雷达反射或反射集合可被存储在各个接收机的处理器的存储器中并被通信至中央控制器以进行处理。
[0052]
在一些实施方式中,通过使根据估计的时间移位而移位的所测量的雷达反射与从所发送的脉冲和雷达图像的估计合成的建模测量集合之间的差异最小化来使天线集合中的各个天线的roi测量的反射匹配,处理器确定雷达图像的估计和测量时间移位。
[0053]
各个天线具有与彼此以及全局普遍接受的时钟近似同步的本地时钟。全局时钟可以是天线之一的实际时钟、不同参考系统(例如,gps卫星、数据聚合和处理系统或一些其它系统)的时钟。另选地,全局时钟可为名义上的,即,不由某一系统物理上跟踪。例如,它可能是使一些或所有测量集合的平均时间移位为零的隐含时钟,或者隐含使平均同步误差等于零的时钟,或者命令中心发送信号以开始系统操作的时间所隐含的时钟。
[0054]
在许多实施方式中,本地时钟由本地振荡器(例如,石英振荡器或原子钟)维持。这
些时钟用于在正确的时刻触发信号传输并且对所接收的测量加时间戳(即,时间上索引)。即使这些时钟最初非常精确地同步,它们由于温度变化、材料缺陷、环境因素或其它原因而表现出不同的时钟漂移,这使得时钟随时间不再同步。尽管可维持这些时钟的粗略同步,但是精确同步到大多数分布式雷达系统应用所需的精度非常困难且昂贵(如果可能的话)。
[0055]
在一些实施方式中,即使系统简单地分布于同一平台上的多个硬件组件上,即使这些组件物理连接并共享生成时钟信号的同一振荡器,同步困难仍可能是问题。在这些情况下,即使存在公共时钟生成振荡器,多个硬件组件上的时钟分配电路中的不确定性也可能导致单独硬件组件之间的时钟误差。
[0056]
如果在处理所接收的信号时知道各个雷达发送机和接收机的时钟误差或其相对时钟移位,则可处理测量以补偿时钟误差,并且可恢复雷达图像。如果时钟误差被补偿,则测量的雷达反射正确对准以生成聚焦的雷达图像,即,锐利且没有表现出模糊度的雷达图像。本发明的实施方式同时确定相对时钟误差以校正测量,以及与校正的测量一致的雷达图像。为了确定正确解,重构确定生成与校正的测量一致的最锐利图像的相对定时校正。
[0057]
雷达发送机和接收机可以是静止的或者沿着预先设计的轨迹移动,并且各个雷达接收机的接收脉冲反射的有效位置形成虚拟阵列。即使具有完美时钟同步,图像中的锐度和模糊度也取决于虚拟阵列的大小和所发送的脉冲的波长。
[0058]
在一些实现方式中,通过基于所确定的测量时间移位集合和雷达图像迭代地更新雷达图像的估计和时间移位来求解凸稀疏恢复问题,直至由雷达图像的估计生成的测量与各个发送机
‑
接收机对的各个接收机天线的时间移位的测量充分匹配。
[0059]
在此迭代处理中,通过计算由雷达图像的估计生成的测量与时间移位的测量之间的误差来测量匹配的充分性。即使在理想情况下,时钟完美同步并且图像估计与实际雷达图像完全相同时,雷达测量也将由于采集处理中固有的噪声而没有完全匹配。此外,本领域中很好理解,由于虚拟阵列大小所导致的分辨率限制,图像估计无法是完美匹配,而是图像的模糊版本。因此,在一些实施方式中,一旦误差下降到最大容许误差以下,迭代处理可停止。在一些实施方式中,当在每次迭代中误差停止改进时,迭代处理可停止。在一些实施方式中,迭代处理可在某预定次数的迭代之后停止,因此降低算法的计算成本。
[0060]
图1c是示出根据一些实施方式的具有用于检测感兴趣区域(roi)140c中的目标130c的移动雷达天线101的分布式阵列的至少一个系统和方法100c的示意图。具体地,系统和方法100c可以是机载平台或车载平台等,其包括至少一个发送/接收平台或发送机/接收机102(可为移动的或静止的)以及m个分布式移动类似接收机平台或接收机103、104、105的集合(也可为移动的或静止的)。可以想到,m个分布式接收机的集合可为一个或更多个、10个或更多个或者20个或更多个。雷达脉冲110从至少一个发送机102(也可以是接收机)发送,以照亮位于感兴趣区域(roi)140c中的目标130c,并且对应反射的雷达反射120c被多个分布式接收机102、103、104和105记录。反射120c可被表征为延迟脉冲的加权组合,其中复权重取决于特定目标反射率和天线图案。给定脉冲和反射,可根据对应权重和延迟在距离
‑
方位平面或距离
‑
方位
‑
高程体积中生成雷达图像。雷达图像的方位和高程分辨率取决于阵列孔径的大小,距离分辨率取决于脉冲的带宽。
[0061]
图1d是示出根据一些实施方式的分布式移动雷达成像系统100d中的时间移位的示意图,示出朝着roi发射的发射雷达脉冲。雷达接收机正在接收形成虚拟阵列120d的雷达
脉冲反射102d、103d、104d、105d。雷达脉冲反射来自从发送机朝着场景140d发射并从场景朝着接收机反射以形成接收机的虚拟阵列120d的雷达脉冲。移动雷达平台101的分布式阵列包括具有天线单元的至少一个雷达平台,该天线单元连接到生成朝着场景的雷达脉冲的雷达发送机102。如上所述,雷达发送机102与接收机102组合。雷达接收机102、103、104、105获取被场景140d的感兴趣区域(roi)中的目标130d反射的反射。
[0062]
在一些实施方式中,雷达接收机102、103、104、105各自具有本地时钟152、153、154、155,其相对于全局时钟可能快或慢。本地时钟用于给所接收的反射加时间戳。例如,在一些实施方式中,加时间戳可能使用绝对时间。在一些其它实施方式中,加时间戳可相对于一个或更多个共同约定的开始时间(通常称为零)。在一些其它实施方式中,加时间戳可能是隐含的,例如通过相对于记录起始时间按规则间隔记录的信号样本序列。
[0063]
在分布式阵列成像中出现的基本挑战来源于天线时钟中的不确定性。诸如全球导航卫星系统(gps/gnss)和惯性导航系统(ins)的先进定位和导航系统提供了准确一些的定时信息,并且定时和同步算法可以合理的成本进一步改进准确性。然而,与发送天线和接收天线的操作频率相比,真实时钟误差中的剩余不确定性可能显著。结果,当不精确的时钟定时用作基准时,所接收的信号包含增益和相位模糊度。因此,在不考虑定时微扰的情况下应用标准重构技术生成离焦的雷达图像。
[0064]
与将定时误差建模为频域中的相位误差并在重构雷达图像之前校正它相反,各种实施方式将定时误差建模为与表示补偿的移位内核(即,单稀疏的信号)的卷积。稀疏信号使得其大多数系数为零,非常少的系数为非零。具体地,单稀疏信号使得仅其一个系数为非零,所有剩余系数等于零。移位内核是非零系数位于内核实现的时间延迟或提前的时间实例处的单稀疏信号。
[0065]
图1e和图1f是示意图,当一起看时示出根据一些实施方式的当测量单个目标的反射时由于各个雷达时钟中的误差而影响所测量的各个天线的时域信号的失真。此外,图1e是所有雷达时钟完美同步的理想情况的示意图。分布式阵列101被示出为包括发送机/接收机平台102以及仅接收机平台103、104、105。发送机天线向包含单个反射目标130的场景发送脉冲110。该脉冲被反射目标反射,并且其反射120被所有接收平台102、103、104、105中的所有接收天线获取。天线102
‑
105形成分布式天线阵列101。如果所有发送机和接收机的时钟完美同步,则根据全局时间t0,由各个天线102、103、104、105接收的信号112、113、114、115包括根据发送机天线到单个反射器并返回到各个接收机的往返距离延迟和缩放的脉冲。
[0066]
图1f是示出根据本公开的实施方式的表现出时钟误差的天线集合之间的映射以及测量单个目标向具有同步时钟的天线集合的反射并且测量同一目标从图1e的移位版本的示意图。此外,图1f是图1a的雷达测量195中的信号模型的示意图,其中以错误时钟测量的单个目标的反射等同于同一目标以同步到全局时间的时钟的时间移位测量。
[0067]
图1f通过示出信号如何记录并按各个接收机的本地时间加时间戳112x、113x、114x、115x来展示时钟误差对所获取的数据的影响。各个系统的本地时钟为152、153、154、155,其中与虚线的全局时间相比,实线显示本地时间。在图中的示例中,一些时钟可能运行慢(152、154),即,当全局时间超过零时显示时间0,或者运行快(153、155),即,当全局时间还未到达零时显示0。根据时间移位,对应信号可能时间移位以与如果所有时钟均已同步
(虚线)的话将如何记录信号相比更早或更晚出现(实线)。
[0068]
在此示例中,发送机/接收机时钟152运行慢。因此,所发送的脉冲110延迟了时钟误差那么多,并且其反射延迟到达接收机。发送机/接收机平台102的接收机天线表现出相同的时钟误差,这在本地时间t中使信号提前,因此抵消了该记录仪信号112x的传输延迟。另一方面,在此示例中接收机103的时钟153运行快。因此与如果所有平台均同步到全局时钟的话将记录的信号113相比,记录仪信号113x延迟了两个时钟的累积误差那么多。类似地,接收机104的时钟154可能运行慢了比发送机时钟152的误差小的量。因此,与如果所有平台均同步到全局时钟的话将记录的信号114相比,记录仪信号114x延迟了两个时钟的误差之差那么多。类似地,接收机105的时钟155可能运行快了比发送机时钟152的误差大的量。因此,与如果所有平台均同步到全局时钟的话将记录的信号115相比,记录仪信号115x提前了两个时钟的误差之差那么多。
[0069]
图2a是展示一些实施方式所使用的时钟误差对记录信号的时间戳的影响的示例的示意图。具体地,接收机具有保持本地时间222的本地时钟220。本地时钟相对于全局时间221表现出误差∈225。在此示例中,本地时钟运行慢,即,在任何时间实例,本地时间低于全局时间。换言之,当全局时钟到达特定时间标记223(例如,34时间单位)时,本地时钟还未到达该时间,例如,到达32.5时间单位的时间标记224并且∈为提前1.5时间单位。本领域的典型惯例是延迟被表示为正时间移位,提前被表示为负时间移位,即,在此示例中∈=
‑
1.5时间单位。
[0070]
仍参照图2a,与使用全局时钟211记录并加时间戳的相同信号相比,使用本地时钟212的时间标记记录并加时间戳的信号210将看起来具有更小的时间戳。例如,图中的脉冲的中间负峰值的全局时间实例213为35,而使用本地时钟的记录在33.5给同一负峰值加时间戳214。如果本地时钟慢,则对于信号中的同一点,与全局时钟的时间戳相比,记录的时间戳提前了∈。如果本地时钟快,则与全局时钟的时间戳相比,记录仪时间戳延迟了∈。
[0071]
图2a还作为示例展示了时间移位等同于与移位内核的卷积并且移位内核是单稀疏信号。具体地,以全局时钟211加时间戳的理想信号提前了时间∈那么多以生成实际以本地时钟212记录并加时间戳的信号。如本领域中熟知的,时间移位可使用与脉冲δ(t
‑
∈)215(即,以时间实例∈为中心的脉冲函数)的卷积250来表示。由于该脉冲仅具有一个非零系数,所以在时间∈,它是单稀疏信号。
[0072]
一些实施方式基于这样的认识:使用单稀疏信号表示延迟扩展了表示的维度。例如,使用采样间隔为δ时间单位的单稀疏信号的离散时间表示来表示t时间单位的最大时间移位需要大小2t/δ+1的移位内核,而非单个时间参数∈。如果应用需要时间延迟的估计,则将时间延迟表示为单个值∈需要单个参数的估计。相反,使用移位内核表示时间延迟需要2t/δ+1参数的估计,即,需要明显更大的问题。此外,如果时间移位中的最大不确定性增加,则基于移位内核的表示的大小与要估计的参数的大小(即,数量)成比例地增加,并且需要更多数据以具有足够的信息。为了比较,如果延迟被表示为单个参数,则不管时间移位中的最大不确定性如何,问题大小恒定。移位内核为单稀疏的约束可有助于降低估计问题的数据要求,尽管维度更高,但是它没有消除对最大长度的依赖性,并且没有降低估计的计算或存储器复杂度。
[0073]
图2b是展示根据另一实施方式的时钟误差对所发送的信号的时间戳的影响的另
一示例的示意图。具体地,发送机具有保持本地时间282的本地时钟280。本地时钟相对于全局时间221表现出误差∈'285。在此示例中,本地时钟运行慢,即,在任何时间实例,本地时间低于全局时间。换言之,当全局时钟到达特定时间标记283(例如,34时间单位)时,本地时钟还未到达该时间,例如,到达32.5时间单位的时间标记284并且∈'为提前1.5时间单位,即,类似于上述示例,在此示例中∈'=
‑
1.5时间单位。
[0074]
仍参照图2b,以本地时钟282所管理的定时发送的信号(例如,脉冲)270将看起来相对于全局时钟较晚发送(即,被延迟)。例如,发送机可对信号传输进行定时,使得脉冲的中间负峰值出现在本地时钟274中的时间34.5。在这种情况下,由于本地时钟误差,所发送的信号将使脉冲的中间负峰值出现在全局时钟273中的时间36。因此,与相对于本地时钟272发送的信号相比,相对于全局时钟271发送的信号时间提前了∈'。由于在此示例中∈'为负,所以∈'的时间提前事实上是
‑
∈'=1.5时间单位的延迟。如已经描述的,该时间移位可被表示为与移位内核216的卷积250。由于与相对于本地时钟272发送的信号相比,相对于全局时钟271发送的信号时间提前了∈',所以移位内核对应于∈'的延迟。
[0075]
相反,如果本地时钟运行快,则与相对于发送机的本地时钟的信号相比,所发送的信号将相对于全局时钟提前。
[0076]
图2c是展示根据一些实施方式的当信号是场景对发送机根据其本地时钟发送的发送信号的反射时,发送机和接收机本地时钟二者处的时钟误差相对于由接收机测量并根据接收机的本地时钟加时间戳的信号的影响的示例的示意图。具体地,发送机具有保持本地时间287的本地时钟289。本地发送机时钟相对于全局时间221表现出误差∈'286。接收机具有保持本地时间227的本地时钟229。本地接收机时钟相对于全局时间221表现出误差∈226。
[0077]
在此示例中,发送机本地时钟和接收机本地时钟二者均相对于全局时钟295慢,尽管具有不同的误差。例如,接收机时间227可能相对于全局时间211慢了1.5时间单位,而发送机时间287可能慢了1时间单位。换言之,接收机时钟225相对于发送机时钟285慢了0.5单位,即,具有等于∈”=∈
‑
∈'=
‑
0.5时间单位的相对时钟误差296。
[0078]
仍参照图2c中的示例,由发送机以发送机的本地时钟289所管理的定时发送的信号(例如,脉冲)290将看起来相对于接收机的本地时钟229较晚发送(即,被延迟)。例如,发送机可对信号传输进行定时,使得脉冲的中间负峰值出现在发送机的本地时钟235中的时间35。在这种情况下,由于相对时钟误差,所发送的信号将使脉冲的中间负峰值出现在接收机的本地时钟233中的时间34.5。因此,与相对于发送机的本地时钟291发送的信号相比,相对于接收机的本地时钟292发送的信号时间延迟了∈”。由于在此示例中∈”为负,所以∈”的时间延迟事实上是
‑
∈”=0.5时间单位的提前。如已经描述的,该时间移位可被表示为与移位内核217的卷积250。由于与相对于接收机的本地时钟272发送的信号相比相对于发送机的本地时钟271发送的信号时间提前了∈”,所以移位内核对应于∈'的延迟。
[0079]
仍参照图2c,对于示例中的该特定发送机
‑
接收机对,接收机接收场景对发送机根据发送机的本地时钟发送的信号的反射。由于这些反射是由发送机发送信号触发的,所以它们与接收机的本地时钟相比时间移位了发送信号与接收机的本地时钟相比所表现出的相同时间移位,即,∈”。因此,对于给定发送机
‑
接收机对的发送机和接收机时钟的相对时间误差∈”,接收机将接收按接收机本地时钟加时间戳的接收信号,其与如果发送机和接收
机完美同步的话接收机将接收并加时间戳的理想信号相比时间延迟了∈”。
[0080]
图3a是示出根据一些实施方式的在计算机中可如何将延迟表示为单个系数300或等同地表示为移位内核302的示意图。将延迟表示为单个系数使用单个存储器单元301。另一方面,将延迟表示为移位内核需要一系列系数,例如存储在一层存储器单元303中,相对于零时间通过各个系数的时间戳304来索引(可能是明确的或隐含的),其中索引可对应于特定持续时间的时间单位。表示中的各个系数是对应时间索引处的移位内核的值。例如,在图中,对于除了内核等于1的索引
‑
5之外的所有时间索引,内核等于零。该内核等同于
‑
5时间单位的延迟。
[0081]
用于表示移位内核的一系列系数也可用于表示其它信号,即,一般卷积内核,例如305。然而,如果不是单稀疏的,则这些卷积内核可不是延迟。单稀疏卷积内核是其表示包括除了具有非零值的单个系数之外全为零的系数的卷积内核。单稀疏卷积内核表示根据非零系数的值具有可能缩放的延迟。如果值等于1,则卷积内核是没有缩放的简单延迟。系数值之和306等于1的单稀疏卷积内核将必然具有值等于1的单个系数,即,它将是移位内核。
[0082]
图3b是示出一些实施方式所使用的由于时钟误差而移位的记录信号与如果不存在时钟误差的话将记录的信号之间的关系的示意图。图的顶部展示了记录仪信号112x、113x、114x、115x等于与移位内核162x、163x、164x、165x的卷积160,对应于时钟误差对如果所有平台同步到全局时钟的话将记录的信号112、113、114、115的影响。等同操作示出于图的底部,其展示了与对应于时钟误差的校正的移位内核162、163、164、165卷积160的记录信号112x、113x、114x、115x等于如果所有平台同步到全局时钟的话将记录的信号112、113、114、115。
[0083]
以这样的方式,寻找未知理想信号的时间移位被转换为寻找将与未知理想信号匹配的雷达测量的时间移位。可从图3b的底部看出,这种问题变换允许将未知时间移位与生成未知理想信号的未知场景解耦,即,未知时间移位和未知场景在方程的不同侧。因此,一些实施方式寻找将与未知理想信号匹配的雷达测量的时间移位,而非寻找未知理想信号的时间移位以与测量匹配。
[0084]
如图3b所示,作为所接收的信号在时间上的未知移位,未知时间移位可被表示为与未知脉冲162x
‑
165x的卷积。这是有利的,因为通过未知脉冲的卷积是线性操作。以这样的方式,与从卷积表示获得的线性化组合的未知元的解耦得到凸雷达图像恢复问题。然而,即使在凸化之后,该问题仍难以求解,因为所得凸问题具有大量参数。此外,当延迟仅被表示为与未知内核的卷积时,该问题可具有大量最优解,而它们中仅有一个是期望的解。
[0085]
一些实施方式基于另一认识:未知移位内核可被表示为时间上单稀疏的未知信号。实际上,这些认识允许将原始非凸图像恢复问题转变为凸稀疏恢复问题,这继而允许使用稀疏重构技术以减小用于估计雷达图像的凸稀疏恢复问题的解空间的大小。
[0086]
为此,一些实施方式恢复包括稀疏目标并以向量形式表示为x∈c
n
的场景的雷达图像128。例如,将通过处理来自遭受时钟误差的m个分布式天线101的f维频域测量来恢复图像。本公开开发了一种图像重构框架,其中,时钟误差导致与时域卷积模型对应的测量数据的时间移位,如上所示。
[0087]
例如,对于发送机
‑
接收机对m,如果发送天线相对于全局时钟向场景发送脉冲p
(t),则在接收机天线处,相对于全局时钟接收的数据等于
[0088][0089]
其中x
n
是场景点n的反射率,r
m
(t)是相对于全局时钟接收的数据,a
mn
(t)是对于发送机/接收机对m作为时间t的函数描述从发送机到场景点n并返回到接收机的反射脉冲的传播的信道的脉冲响应,*表示卷积操作。
[0090]
给定发送机相对于接收机的相对时钟延迟∈
m
,则在接收机的本地时钟中接收的信号等于
[0091][0092]
其中y
m
(t)是在接收机的本地时钟中接收的信号,δ(t
‑
∈
m
)是延迟了∈
m
的脉冲。
[0093]
如图3b中描述的,这意味着当移位了反向延迟
‑
∈
m
时在接收机的时钟中接收的信号将等于如果发送机和接收机同步的话将接收的信号,即,
[0094][0095]
图4示出一些实施方式所使用的凸稀疏恢复问题的组件的示意图。具体地,该图展示了由于时钟误差而移位的记录信号与如果不存在时钟误差的话将记录的信号之间的关系的数学表示410,如之前(例如,关于图3b)描述的。要注意的是δ(t+∈
m
)*y
m
(t)=y
m
(t)*δ(t+∈
m
)。
[0096]
图5示出根据一些实施方式的图4的组件变换为所得频域模型的示意图。例如,关系410的时域模型可在频域中通过进行傅里叶变换510来表达。使用傅里叶变换,时域模型中与时间延迟或提前的卷积被转换为频域模型中与复指数的乘法550,这降低了计算的复杂度。因此,所得频域模型520为
[0097][0098]
其中y
m
(ω)、r
m
(ω)、p(ω)和a
mn
(ω)分别是y
m
(t)、r
m
(t)、p(t)和a
mn
(t)的傅里叶变换,ω是频域中的频率。
[0099]
图6a示出根据一些实施方式的将图5的所得频域模型离散化的示意图。在一些实施方式中为了使频域模型520由处理器处理,根据诸如nyquist定理或landau定理的采样定理将模型520离散化为时间和频率网格。这种离散化将各个傅里叶变换转换为可在计算机中执行的操作610(例如,使用快速傅里叶变换(fft)或矩阵乘法)。
[0100]
具体地,离散化的等效模型为r
m
=a
m
x,其中r
m
包含r
m
(ω)频率中的样本,矩阵a
m
在频率中包含发送脉冲p(ω)和信道响应a
mn
(ω)。矩阵a是定义脉冲通过场景并返回到接收机的传播的正向算子。换言之,给定场景x的图像,乘积a
m
x生成信号r
m
,其是雷达脉冲通过场景的雷达传播函数的传播。
[0101]
使用来表示频域中的提前z(t)=δ(t+∈
m
),接收机的时钟中的离散化数据满足
[0102][0103]
其等同于
[0104][0105]
其中,y
m
是频域接收数据,z
m
是时域提前的脉冲响应,f是傅里叶变换矩阵,fz
m
是z
m
的傅里叶变换(即,提前的频域表示),是y
m
在对角线上的对角算子,0是系数全为零的向量。换言之,离散化将逐元素乘法550转换为对角矩阵与向量fz
m
的乘法。
[0106]
在一些实施方式中为了求解该方程,方便的是使用矩阵形式
[0107][0108]
在一些其它实施方式中,可使用矩阵形式
[0109][0110]
即使这两个形式是等效的,在一些情况下后者可能是优选的,因为所得矩阵表现出更可取的条件性质。另一方面,在存在噪声的情况下,后一种形式可能更放大噪声,这可能不太可取。作为示例,本公开的其余部分使用后一种形式,尽管在其它实施方式中前一种或其它形式可被容易地替代。
[0111]
在一些实施方式中,来自所有发送机
‑
接收机对的数据和时钟延迟可被组合并以以下模型表示:
[0112][0113]
其中并且θ是所有条目均等于零的矩阵。
[0114]
一些实施方式通过确定使方程的左手侧尽可能接近于零的x和z
m
来求该模型的解。在一些实施方式中,完全相等将是不可能的,因为数据的测量包括噪声。然而,即使在存在噪声的情况下,该问题也是欠定的,即,左手侧具有等于零的多个解。此外,使左手侧等于零的任何解可通过任何标量来缩放,并且左手仍为零。另外,任一对解之和仍为解,即,使左手侧等于零。因此,存在单个非零解意味着无穷多个解是可能的。此外,x=0,并且z
m
=0,因为所有m始终是解,尽管微不足道且无意义。
[0115]
因此,一些实施方式施加进一步的约束以确定上述方程组的解。例如,由于z
m
是延迟,所以它应该是稀疏的并且总和为1,即,满足1
t
z
m
=1,其中1是所有系数均等于1的向量,
1
t
是其转置。一些实施方式使用z
m
的1范数(即,||z
m
||1)的正则化来促进或强制z
m
的稀疏性。
[0116]
一些实施方式可进一步要求反射率图像x在某一基础(例如,规范基)上是稀疏的,或者可具有稀疏梯度(即,低总变差(tv))。另外地或另选地,一些实施方式使用包括雷达图像的1范数和雷达图像的总变差(tv)范数的组合的融合lasso正则化来强制稀疏性。另选地或另外地,一些实施方式要求反射率图像x的系数之和为正并且近似等于预定常数c。
[0117]
图6b示出根据一些实施方式的矩阵形式的凸稀疏恢复问题的示例表述。具体地,示例实施方式可求解以下优化问题以确定解,其施加了所有上述约束:
[0118][0119]
条件是:
[0120]
在(11)中,γ确定优化应该多强地强制反射率图像x的系数之和近似等于预定常数c的要求,并且λ
x
和λ
z
通过确定使模型的左手侧等于零的x和z
m
来平衡x和z
m
的稀疏性。其它实施方式可利用在一个基础上促进x的低总变差或稀疏性的另一正则化替代在规范域中促进x的稀疏性的稀疏正则化||x||1。
[0121]
(11)中的问题是凸稀疏恢复问题,因此允许计算上易处理且有效的解。此外,凸性保证了最优解将是全局的,因此优化算法将不会提供仅局部最优的解。一些实施方式迭代地求解凸稀疏恢复问题直至满足终止条件,以生成雷达图像。以这样的方式,迭代生成雷达图像的估计和时间移位,使得包括天线集合中的各个天线的时间移位的雷达测量与雷达脉冲通过场景的雷达传播函数传播而生成的信号之间的差异的误差或成本(11)减小。
[0122]
图6c示出根据一个实施方式的求解凸稀疏恢复问题的伪代码。在此实施方式中,处理器使用快速迭代收缩阈值化算法(fista)来求解雷达图像恢复问题。fista迭代以减小误差或成本(11)。
[0123]
例如,fista在计算梯度步(2)、使用收缩算子(3)阈值化、投影到约束集(4)、更新步长(5)以及根据步长(6)更新解估计之间迭代。在每一次迭代之后,在(11)中最小化的误差减小。该算法迭代直至满足停止标准,例如误差下降到最大容许误差以下,或者在各个迭代中误差停止改进,或者例如达到某预定迭代次数。
[0124]
另外地或另选地,不同的实施方式使用其它方法来求解凸稀疏恢复问题。例如,其它实施方式使用其它求解器,例如迭代收缩阈值化算法(ista)的变体,其省略了fista中的步骤5并将步骤6设定为w
j
=u
j
。一些其它实施方式使用诸如二阶内点算法的其它凸优化算法,或者可能使用乘数交替方向法(admm)和/或可能使用规范凸规划来将该优化问题转换为可利用通用优化求解器(例如,cvx)求解的标准形式。利用成本函数的二次部分的凸性和
平滑性,一些其它实施方式使用贪婪算法来直接对x和z
m
施加稀疏约束。
[0125]
图7是根据一些实施方式的本公开可以想到的雷达系统的计算机系统的框图。计算机系统700与天线101、102、103、104、105的集合通信并且可将所收集的数据存储在由计算机700的处理器740处理的存储器730中。计算机系统700可包括可将计算机系统连接到键盘751和显示装置752的人机接口或用户接口750。计算机系统700可通过总线756链接到适于将系统700连接到显示装置748的显示接口757,其中,显示装置748可包括计算机监视器、相机、电视、投影仪或移动装置等。
[0126]
计算机系统700可包括电源754,根据应用,电源可以可选地位于计算机系统的外部。同步和成像处理器740可以是一个或更多个处理器,其可被配置为执行所存储的指令以及与存储可由同步和成像处理器740执行的指令的存储器730通信。同步和成像处理器740可以是单核处理器、多核处理器、计算机集群或任何数量的其它配置。同步和成像处理器740通过总线756连接到一个或更多个输入和输出装置。存储器730可包括随机存取存储器(ram)、只读存储器(rom)、闪存或任何其它合适的存储器系统。
[0127]
仍参照图7,计算机系统700还可包括适于存储由同步和成像处理器740使用的补充数据和/或软件模块的存储装置758。例如,存储装置758可存储与预先设计的雷达平台轨迹有关的历史数据、雷达操作频率带宽、发送波形、估计的信噪比、与目标识别有关的图像数据、以处理位置误差的不同方法使用仿真数据的成像结果等。存储装置358可包括硬盘驱动器、光驱、拇指驱动器、驱动器阵列或其任何组合。
[0128]
仍参照图7,打印机接口759也可通过总线756连接到计算机系统700并且适于将计算机系统700连接到打印装置732,其中,打印装置732可包括液体喷墨打印机、固体墨水打印机、大型商用打印机、热敏打印机、uv打印机或者热升华打印机等。网络接口控制器(nic)734适于通过总线756将计算机系统700连接到网络736。图像数据或相关图像数据等可经由网络736在显示装置、成像装置和/或打印装置上渲染。
[0129]
仍参照图7,图像数据或相关图像数据等可经由网络736的通信信道发送,和/或被存储在计算机的存储系统758内以用于存储和/或进一步处理。此外,图像数据或相关图像数据可从接收机741无线地或有线地接收或者经由发送机743无线地或有线地发送,接收机741和发送机743均通过总线756连接到计算机系统700。
[0130]
计算机系统700可连接到外部传感器731、一个或更多个输入装置741、其它计算机742和其它装置744。外部传感器731可包括运动传感器、惯性传感器、一种测量传感器等。外部传感器731可包括用于速度、方向、气流、到对象的距离或位置、天气状况等的传感器。输入装置741可包括例如键盘、扫描仪、麦克风、手写笔、触敏板或显示器。
[0131]
在以下描述中给出具体细节以提供实施方式的彻底理解。然而,本领域普通技术人员可理解,实施方式可在没有这些具体细节的情况下实践。例如,所公开的主题中的系统、过程和其它元件可作为组件以框图形式示出,以免在不必要的细节方面使实施方式模糊。在其它情况下,熟知过程、结构和技术可在没有不必要的细节的情况下示出,以避免使实施方式模糊。此外,各种附图中的相似标号和指代指示相似的元件。
[0132]
另外,各个实施方式可作为过程描述,其被描绘为流程图、数据流程图、结构图或框图。尽管流程图可将操作描述为顺序过程,但许多操作可并行或同时执行。另外,操作次序可重新布置。过程在其操作完成时可终止,但是可具有未讨论或附图中未包括的附加步
骤。此外,并非任何具体描述的过程中的所有操作可出现在所有实施方式中。过程可对应于方法、函数、程序、子例程、子程序等。当过程对应于函数时,函数的终止可对应于函数返回到调用函数或主函数。
[0133]
此外,所公开的主题的实施方式可至少部分地手动或自动实现。可通过使用机器、硬件、软件、固件、中间件、微码、硬件描述语言或其任何组合来执行或至少辅助手动或自动实现。当以软件、固件、中间件或微码实现时,执行所需任务的程序代码或代码段可被存储在机器可读介质中。处理器可执行所需任务。
[0134]
我们本公开的实施方式包括通过允许时钟误差以及利用多个传感器的分布式感测的同步的相干分布式雷达成像。具体地,一种多基地雷达成像方法,其中一个或更多个发送/接收雷达平台和多个接收雷达平台朝着感兴趣区域(roi)移动,其各自具有时钟误差。我们本公开的实施方式检测roi内的目标。尽管各个传感器阵列的图像分辨率可能由于其较小的孔径大小而较低,但是可通过联合处理具有良好补偿的时钟误差的所有分布式阵列的输出来形成高分辨率图像。我们本公开的实施方式假设稀疏场景,并且通过求解凸优化问题,同时补偿时钟引起的相位误差,利用目标签名,并且重构roi的图像来迭代地实现。
[0135]
我们本公开的实施方式还提供用于自动聚焦雷达成像,以用于使用单个移动发送雷达平台或组合发送机/接收机连同多个空间分布的移动雷达接收机平台或接收机来生成位于感兴趣区域中的目标的雷达图像。移动雷达接收机受到未知定时误差的干扰。
[0136]
另外,本文中概述的各种方法或处理可被编码为可在采用各种操作系统或平台中的任一种的一个或更多个处理器上执行的软件。另外,这种软件可使用多种合适的编程语言和/或编程或脚本工具中的任一种来编写,并且也可被编译为在框架或虚拟机上执行的可执行机器语言代码或中间代码。通常,在各种实施方式中,程序模块的功能可根据需要组合或分布。
[0137]
另外,本发明的实施方式可被具体实现为一种方法,已提供其示例。作为该方法的一部分执行的动作可按照任何合适的方式排序。因此,可构造以与所示不同的次序执行动作的实施方式,其可包括同时执行一些动作,尽管在例示性实施方式中作为顺序动作示出。此外,在权利要求中使用诸如“第一”、“第二”的序数词修饰权利要求元素本身并不暗示一个权利要求元素相比于另一权利要求元素的任何优先或次序或者方法动作执行的时间次序,而是仅用作标签以将具有特定名称的一个权利要求元素与具有相同名称(但使用序数词)的另一元素相区分,以区分权利要求元素。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1