一种航天器测距结果与测距基准变化一致性的测试方法与流程
[0001]
本发明属于测试技术领域,涉及航天器系统级测试技术,特别涉及一种航天器测距结果与测距基准变化一致性的测试方法。
背景技术:
[0002]
航天器的测距基准调整后测距结果会随之改变,该测距结果变化对于诸如导航卫星之类对测距精度要求极高的航天器应用来说将产生重大影响,因此需要对测距结果与测距基准同步变化的准确性进行精确测量。传统的处理方法中设定被测航天器处于静止状态,单向测距结果为稳定值,而实际航天器受到轨道动态影响,单向测距结果是随轨道变化的变量,此动态测距过程未得到验证,将导致测距结果与测距基准变化一致性的测试环境与真实的在轨状态相比存在差异,无法代表实际在轨工作状态。另外,传统测试方法中对测距结果进行采样分析,通过单次测距结果进行该指标处理,引入较大系统误差,使测试结果准确度下降。因此需建立轨道动态条件的模拟测试环境,并降低测距结果分析过程中的系统误差,以弥补现有测试方法的不足。进行该指标测试,主要面临两个问题:一是轨道动态模拟结果直接影响单向测距结果,精确模拟动态过程并对动态测距结果进行精准闭环分析难度大;二是测距结果变化量与基准变化量理论上严格一致,仅存在系统实现误差,为测量出两者之间的误差要求高精度的测试方法。
技术实现要素:
[0003]
为了克服现有技术中存在的问题,本发明人进行了锐意研究,提供了一种航天器测距结果与测距基准变化一致性的测试方法,解决了被测航天器受到轨道动态影响导致的单向测距结果不准确的问题,以及现有技术中以单次测距结果进行分析引入较大系统误差的问题,从而完成本发明。
[0004]
本发明提供的技术方案如下:
[0005]
一种航天器测距结果与测距基准变化一致性的测试方法,包括:
[0006]
搭建测试系统,使被测航天器通过变频器与地面基带设备进行射频信号传输,地面基带设备通过地面时频基准设备与被测航天器进行时间同步并计算得到地面基带设备测距结果;
[0007]
通过钟差记录设备记录被测航天器与地面时频基准设备之间的钟差;
[0008]
安装动态模拟单元,通过动态模拟单元模拟与被测航天器建立测距通道的其他航天器轨道动态,得到轨道动态理论值,并输出多普勒频移给地面基带设备,地面基带设备输出含轨道动态的信号;被测航天器处理含轨道动态的信号得到动态测距值,并以遥测形式回传至地面基带设备,地面基带设备接收到被测航天器的动态测距值,并结合动态模拟单元给出的轨道动态理论值进行差值分析,得到剔除轨道动态理论值后的被测航天器测距结果;
[0009]
记录测距基准变化前被测航天器测距结果a0、基带设备测距结果b0、钟差c0;
[0010]
调整航天器的测距基准,测量并记录基准变化后被测航天器测距结果、基带设备测距结果和钟差;
[0011]
分析测距基准变化前后航天器测距结果的变化量、基带设备测距结果的变化量、以及钟差的变化量,得到测距结果与测距基准变化一致性的测试结果。
[0012]
进一步地,所述记录测距基准变化前被测航天器测距结果a0、基带设备测距结果b0、钟差c0的步骤中,通过地面基带设备统计设定时间段内的航天器测距结果,并计算该设定时间段内航天器测距结果的期望值,以该期望值作为后续测试测距结果与测距基准变化一致性的参数。
[0013]
进一步地,所述记录测距基准变化前被测航天器测距结果a0、基带设备测距结果b0、钟差c0的步骤中,通过地面基带设备计算设定时间段内的基带设备测距结果,并计算该设定时间段内基带设备测距结果的期望值,以该期望值作为后续测试测距结果与测距基准变化一致性的参数。
[0014]
进一步地,所述记录测距基准变化前被测航天器测距结果a0、基带设备测距结果b0、钟差c0的步骤中,通过钟差记录设备记录设定时间段内被测航天器与地面时频基准设备之间的钟差,并计算该设定时间段内钟差的期望值,以该期望值作为后续测试测距结果与测距基准变化一致性的参数。
[0015]
进一步地,所述调整航天器的测距基准,测量并记录基准变化后被测航天器测距结果、基带设备测距结果和钟差的步骤中,将航天器的测距基准分别调整为超前状态和滞后状态,测量测距基准超前状态下被测航天器测距结果a1、基带设备测距结果b1和钟差c1,以及测距基准滞后状态下被测航天器测距结果a2、基带设备测距结果b2和钟差c2。
[0016]
进一步地,所述分析测距基准变化前后航天器测距结果的变化量、基带设备测距结果的变化量、以及钟差的变化量,得到测距结果与测距基准变化一致性的测试结果的步骤中,一致性测试的评价指标如下:
[0017][0018]
式中,δ为被测航天器测距结果与测距基准变化一致性指标要求;a0、b0、c0分别为基准变化前被测航天器测距结果、基带设备测距结果和钟差;a1、b1、c1分别为基准超前状态下被测航天器测距结果、基带设备测距结果和钟差;a2、b2、c2分别为基准滞后状态下被测航天器测距结果、基带设备测距结果和钟差。
[0019]
根据本发明提供的一种航天器测距结果与测距基准变化一致性的测试方法,具有以下有益效果:
[0020]
(1)考虑到在轨实际工作状态下航天器之间或航天器与地面设备之间存在相对运动,本发明测试时通过安装动态模拟单元模拟被测航天器与其他卫星或地面设备之间的相对运动和位置关系的功能,并输出多普勒参数给地面基带设备,地面基带设备通过发射频率动态信号实现动态测距,解决了被测航天器受到轨道动态影响导致单向测距结果不准确的问题;
[0021]
(2)本发明中,用于作为后续测试测距结果与测距基准变化一致性参数的被测航天器测距结果、基带设备测距结果和钟差均为设定时间段内的期望值,解决了现有技术中以单次测距结果进行分析,引入较大系统误差的问题;
[0022]
(3)地面时频基准设备存在钟差抖动,本发明中测试方法不受钟差抖动的影响,测试过程简单有效。
附图说明
[0023]
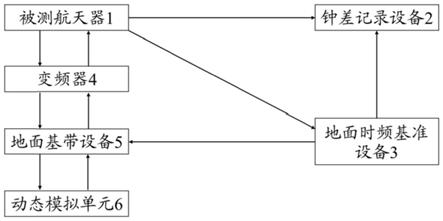
图1示出航天器测距结果与测距基准变化一致性测试系统框图;
[0024]
图2示出航天器基准超前状态的单向测距结果与测距基准变化一致性测试原理图;
[0025]
图3示出航天器基准滞后状态的单向测距结果与测距基准变化一致性测试原理图。
具体实施方式
[0026]
下面通过对本发明进行详细说明,本发明的特点和优点将随着这些说明而变得更为清楚、明确。
[0027]
本发明提供了一种航天器测距结果与测距基准变化一致性的测试方法,包括如下步骤:
[0028]
如图1所示,搭建测试系统,使被测航天器1通过变频器4与地面基带设备5进行射频信号传输,地面基带设备5通过地面时频基准设备3与被测航天器1进行时间同步并计算得到地面基带设备测距结果;
[0029]
通过钟差记录设备2记录被测航天器1与地面时频基准设备3之间的钟差;
[0030]
安装动态模拟单元6,通过动态模拟单元6模拟与被测航天器1建立测距通道的其他航天器轨道动态,得到轨道动态理论值,并输出多普勒频移给地面基带设备5,地面基带设备5输出含轨道动态的信号;被测航天器1处理含轨道动态的信号得到动态测距值,以遥测形式回传至地面基带设备5,地面基带设备5接收到被测航天器1的动态测距值,并结合动态模拟单元6给出的轨道动态理论值进行差值分析,得到剔除轨道动态理论值后的被测航天器测距结果;
[0031]
记录测距基准变化前被测航天器测距结果a0、基带设备测距结果b0、钟差c0;
[0032]
调整航天器的测距基准,测量并记录基准变化后被测航天器测距结果、基带设备测距结果和钟差;
[0033]
分析测距基准变化前后航天器测距结果的变化量、基带设备测距结果的变化量、以及钟差的变化量,得到测距结果与测距基准变化一致性的测试结果。
[0034]
我们知道,实际应用中航天器之间或航天器与地面设备之间存在相对运动,测距结果随航天器的运动而变化,非固定值。为此,本发明中应用轨道参数得到轨道动态,通过动态模拟单元6模拟被测航天器与其他航天器之间的相对运动和位置关系的功能,通过发射频率动态信号配合被测航天器1实现动态测距。被测航天器的动态测距结果以遥测形式回传到地面基带设备5,由地面基带设备5对动态测距结果和动态模拟理论值进行差值处理,得到消除动态过程影响的航天器测距结果a(t),地面基带设备5统计δt时间内的航天
器测距结果,并求δt内航天器测距结果的期望值,即在本发明中,通过地面基带设备5统计设定时间段内的航天器测距结果,并计算该设定时间段内航天器测距结果的期望值,以该期望值作为后续测试测距结果与测距基准变化一致性的参数。
[0035]
同时,测试系统中地面时频基准设备3在实际测量过程中,会存在钟差抖动值δp,针对消除钟差抖动δp的说明如下,图2时序图中以0时刻为起始时刻,此时钟差记录设备2测得被测航天器1与地面基带设备5的钟差c=t2-t1。在不考虑钟差抖动值的前提下,被测航天器在t4时刻接收到地面基带发射信号s2,而实际上,地面时频基准设备3存在钟差抖动值为δp,则被测航天器在t4+δp时刻接收到地面基带发射信号s2。计算被测航天器测距结果应扣除钟差,并能同时消除钟差抖动造成的影响。钟差抖动前被测航天器测距结果为a=(t4-t1)
–
c,钟差发生δp抖动后被测航天器测距结果变为a
′
=(t4+δp-t1)-c
′
,其中c
′
=t2+δp-t1,即a
′
=(t4+δp-t1)-(t2+δp-t1)=(t4-t1)
–
c=a,因此,本发明中测试方法消除了钟差抖动δp对被测航天器测距结果造成的影响,同样也消除了钟差抖动δp对基带设备测距结果造成的影响。
[0036]
基带设备测距结果b(t)由地面基带设备5处理得到,统计δt时间内的基带设备测距结果b(t)并求δt内地面设备测距结果b(t)的期望值,被测航天器1与地面基带设备5的钟差由钟差记录设备2计算得出,钟差值随时间变化的函数为c(t),统计δt时间内的时间变化的函数c(t),并求δt内时间变化的函数c(t)期望值,即:即在本发明中,通过地面基带设备5计算设定时间段内的基带设备测距结果,并计算该设定时间段内基带设备测距结果的期望值,以该期望值作为后续测试测距结果与测距基准变化一致性的参数;通过钟差记录设备2记录设定时间段内被测航天器1与地面时频基准设备3之间的钟差,并计算该设定时间段内钟差的期望值,以该期望值作为后续测试测距结果与测距基准变化一致性的参数。为准确分析测距结果随测距基准变化规律的过程,以下场景以被测航天器运动过程中的某固定时刻为例。
[0037]
在本发明测试方法中,需要测量测距基准未调整时、测距基准调整为超前状态、测距基准调整为滞后状态时的3组被测航天器测距结果、地面基带测距结果和钟差结果,来分析得到测距结果与测距基准变化一致性,测试过程说明如下。
[0038]
测距基准未调整时,在时序图中以0时刻为起始时刻,此时被测航天器与地面基带设备的钟差c0=t2-t1。地面基带在t5时刻接收到被测航天器发射信号s1,通过地面基带设备5仿真计算得到地面测距结果b0=t5-t2。被测航天器在t4时刻接收到地面基带发射信号s2,得到被测航天器动态测距结果,经地面基带剔除动态后得到被测航天器测距结果a0=t4-t1。
[0039]
测距基准调整为超前状态时,调整被测航天器测距结果基准超前于当前基准x ns,被测航天器在t3=t1+x时刻发射信号s1’,t4时刻接收到地面信号s2,得到第二组被测航天器测距结果a1=t4-t3。地面基带t2时刻发送信号s2,地面基带t6=t5+x时刻接收到s1’,地面设备测距结果b1=t6-t2。此时被测航天器与地面基带设备的钟差c1=t2-t3。
[0040]
测距基准调整为滞后状态时,按照时序图3,调整被测航天器测距结果基准滞后y ns,得到第三组被测航天器测距结果a2=t4-t3,地面设备测距结果b2=t6-t2,钟差c2=t2-t3。
[0041]
得到理论计算公式:
[0042][0043]
实测时,被测航天器和测试设备计算的测距结果均有系统误差,测距结果随测距基准变化的量存在一定范围,最后测距与基准变化一致性测试的计算公式为:
[0044][0045]
其中,δ为被测航天器测距结果随测距基准变化允许的最大误差,即测距结果与测距基准变化一致性指标要求,单位可为纳秒(ns),如果实测结果使4项公式均满足,则认为航天器测试结果符合指标要求。
[0046]
以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1