一种水下机器人用北斗通信与定位系统的制作方法
[0001]
本发明涉及水下机器人通信与定位领域,具体地是一种水下机器人用北斗通信与定位系统。
背景技术:
[0002]
中国北斗卫星导航系统(beidou navigation satellite system,bds)是中国自行研制的全球卫星导航系统。可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并具短报文通信能力,北斗终端是指即利用北斗卫星导航系统进行定位及导航的终端设备,但是现有的北斗rdss通信和应用终端在传输数据方面存在如下问题:
[0003]
1.现有的北斗rdss一次只能发送约78个字节,且存在一定概率的丢包,对于较大数据量需要进行分包传输,可靠性难以保证。
[0004]
2.市场现有北斗传输终端体积大、功耗高。对于电池供电或空间狭小的应用,缺少合适的产品。
[0005]
近年来在海洋装备的北斗系统应用项目中,需要通过rdss进行群组通信,总体需求如下:
[0006]
1.多个终端与1个中心系统之间进行一定数据量(如几十到数k字节)的相互通信。
[0007]
2.数据通信可靠率期望接近100%,如果失败应有反馈消息。
[0008]
3.终端需要高可靠、小型化、低功耗。
技术实现要素:
[0009]
针对现有的北斗rdss通信和应用终端在传输数据方面存在的问题,本发明的目的在于提供一种水下机器人用基于北斗通信与定位系统,打破铱星&gps的通信定位组合对于海洋装备的垄断,实现海洋观测装备的通信定位国产可控。
[0010]
本发明为实现上述目的所采用的技术方案是:
[0011]
一种水下机器人用北斗通信与定位系统,包括数据收发单元、ic卡、微处理器、电平转换单元在内的模组,其中:
[0012]
数据收发单元,天线接口与微处理器之间的数据交互;
[0013]
ic卡,用于北斗rdss通信;
[0014]
微处理器,用于北斗短报文格式数据的打包和解析;
[0015]
电平转换单元,用于微处理器与用户接口之间数据交互的电平转换。
[0016]
还包括与模组通过天线接口相连的外部天线。
[0017]
所述模组还包括:分别与微处理器相连的定位单元、存储单元、电源管理单元,其中:
[0018]
定位单元,用于进行水下机器人定位;
[0019]
存储单元,用于存储微处理器与数据收发单元进行数据交互结果信息;
[0020]
电源管理单元,用于系统的电源控制。
[0021]
所述外部天线包括s频点天线和l频点天线。
[0022]
一种水下机器人用北斗通信与定位方法,包括数据发送方法,具体为:
[0023]
微处理器实时通过电平转换单元监控用户接口,当电平转换单元接收到用户发送的水下机器人观测数据或定位数据时,将数据以短报文数据格式进行打包处理并根据单次发送数据量配置rdss ic卡,然后推送给数据收发单元,通过天线接口连接外部天线并与卫星建立连接发送;
[0024]
还包括数据接收方法,具体为:
[0025]
外部天线接收到卫星发送的短报文格式数据包后,通过数据收发单元发送给微处理器;
[0026]
微处理器识别出每一张rdss ic卡所接收的短报文格式数据包并打上所对应的rdss ic卡标签;
[0027]
微处理器将各rdss ic卡号接收的短报文数据包进行解析,整合并通过电平转换单元将解析后的数据推送至用户。
[0028]
本发明具有以下有益效果及优点:
[0029]
1.本发明系统创新性的将北斗通信及定位运用到水下机器人中进行海洋观测应用,解决了传统北斗rdss通信和应用终端在数据传输方面存在的一次只能发送约78个字节,且存在一定概率的丢包,对于较大数据量需要进行分包传输,可靠性难以保证等一系列问题,通过数据透传模式,将串口数据依照rdss ic卡的数量进行分配,在超时时间内进行可靠数据传输,并将传输结果进行反馈。突破北斗链路传输大量水下机器人海洋观测数据这一关键技术,实现海洋观测装备通信定位可控,集成后的海洋装备将具有良好的应用前景。
[0030]
2.本发明系统提供了便捷的开发使用接口,不限于在水下机器人上的应用,对于一些陆地装备,本发明系统同样可以实施部署。
附图说明
[0031]
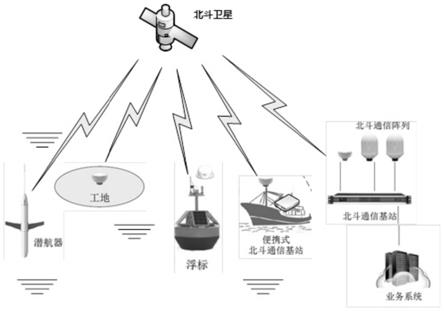
图1是本发明系统总体架构和应用场景图;
[0032]
图2是北斗通信与定位终端模组功能框图。
具体实施方式
[0033]
下面结合附图及实施例对本发明做进一步的详细说明。
[0034]
如图1所示,将自主研发的北斗通信定位终端集成至水下机器人控制系统,北斗通信与定位终端由模组及外部天线构成,以北斗rdss大数据量可靠通信及定位方式将自身观测数据以及定位信息发送至北斗岸基中心,岸基中心由多个北斗通信阵列与北斗通信基站组成,北斗通信基站控制通信阵列与多个终端之间进行一定数据量的双向可靠通信,动态调整通信资源,配置通信带宽,实现通过通信链路将水下机器人对海洋观测及定位数据的实时获取。
[0035]
所述北斗通信与定位终端模组基于北斗核心芯片,以c8051f单片机作为微处理器,模组内部集成天线接口、数据收发单元、ic卡槽、定位单元、存储单元、电源管理以及
rs232电平转换单元,rdss ic可配置2~32张卡。在数据发送方面,c8051f单片机通过rs232电平转换单元实时监控用户接口,在接收到用户想要发送的数据后,以北斗短报文数据格式进行打包处理,依照用户单次发送数据量以及自身配置rdss ic卡的数量,将打包后的短报文格式数据动态分配至每张卡,若发送数据量低于78字节,则分配至单卡进行数据传输,若数据量超过78字节,则将数据按照最少ic卡使用原则进行分配(数据总量除以78字节得出占用ic卡的数量,按照编号顺序分配给ic卡),然后推送给数据收发单元,通过外接天线与卫星建立连接发送出去。在数据接收方面,外接天线接收到北斗卫星发送的数据,短报文数据进入终端的北斗收发单元,北斗收发单元在接收到北斗短报文格式的数据后,首先识别出各个卡所接收到的数据包,并打上终端卡号的标签,随后将携带有终端卡号的短报文格式数据发送至c8051f单片机,单片机将各卡号接收的短报文数据进行解析,整合,通过rs232电平转换模块将解析后的数据推送至用户接口,从而实现大数据量透传功能。与此同时微处理器c8051f单片机也可以控制北斗定位单元输出rnss定位信息。
[0036]
如图2所示,一种水下机器人用北斗通信与定位系统,包括数据收发单元、ic卡、微处理器、电平转换单元在内的模组,其中:
[0037]
数据收发单元,天线接口与微处理器之间的数据交互;
[0038]
ic卡,用于北斗rdss通信,单个ic卡在一分钟之内仅能传输78字节;
[0039]
微处理器,用于北斗短报文格式数据的打包和解析;
[0040]
电平转换单元,用于微处理器与用户接口之间数据交互的电平转换。
[0041]
还包括与模组通过天线接口相连的外部天线。
[0042]
所述模组还包括:分别与微处理器相连的定位单元、存储单元、电源管理单元,其中:
[0043]
定位单元,用于进行水下机器人定位,可输出rnss定位信息;
[0044]
存储单元,用于微处理器与北斗rdss收发单元进行数据交互结果信息存储,为2gb flash存储器;
[0045]
电源管理单元,用于系统不同工况下各类ldo的开关控制,节省功耗。
[0046]
所述天线是模组通过馈线连接至外部天线,其性能参数如下:
[0047]
[0048][0049]
所述北斗通信阵列是基于北斗核心芯片,集成了北斗天线、定位通信及主控等单元,便于安装和使用。同时具有高可靠的北斗短报文通信、北斗/gps双系统定位等功能。
[0050]
所述指令模式主要用于查询本设备的参数和状态,以及数据发送包括以下内容:
[0051][0052][0053]
所述透传模式,代表在该模式下发送串口数据的过程中,会根据rdss ic卡的数量,在超时时间内通过北斗短报文进行可靠的数据传输。为了实现可靠传输过程的反馈,需
要设置合理的传输超时时间,此参数可在指令模式下进行修改。
[0054]
工作模式(以水下滑翔机为例):
[0055]
1.水下滑翔机平时关闭终端电源。当滑翔机露出水面时,打开终端电源,水下滑翔机主控系统将大量数据发送给终端,由终端自主根据信号情况将数据可靠传输至岸基中心或移动基站。
[0056]
2.终端保持定位信息输出,其余功能休眠。终端收到水下滑翔机主控系统发送数据指令后,唤醒传输功能,完成传输后恢复到输出单定位低功耗状态(即只输出定位信息,不传输数据)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1