一种基于模糊推理系统的快速故障检测方法与流程
[0001]
本发明涉及一种基于模糊推理系统的快速故障检测方法,属于直流电力系统技术领域。
背景技术:
[0002]
变电站的直流系统作为一个重要的能源供给系统,为控制、信号、继电保护、自动装置及事故照明等提供可靠的直流电源,同时直流系统还为操作提供可靠的操作电源,直流系统是否可靠,对变电站内设备的安全运行有着非常重要的影响,可靠的直流系统是变电站安全运行的基础。变电站直流系统的充电方式是通过高频电源开关给蓄电池充电,短时的市电中断时,蓄电池依旧可以继续供电。由于直流电源的作用非常重要,因此直流电源自身的安全性和可靠性对整个变电站乃至整个供电系统的安全运行至关重要。虽然直流电源在绝大部分情况下是稳定的,但在实际运行过程中,也存在发生故障的隐患,最常见的故障为直流接地,当直流系统发生一点接地时,监视装置会发出报警信号;当直流两点接地故障时,将可能使得保护装置发生误动或拒动;当交流、直流回路发生混接时也可能造成直流接地,从而引发继电保护装置发生误动作。
[0003]
多直流系统无论是故障类型、故障发展过程、故障电压电流特性还是故障后果与交流配电网都有所不同;直流配电网中接入多元化的分布式电源、负荷、储能,直流配电系统存在多种不同的运行状态,大量电力电子装置的存在,给保护配合带来了挑战。多直流系统保护的研究与应用必须考虑不同运行状态、源荷敏感特性与故障类型之间的关系。保护模型需要改进或优化以得到更佳的系统参数;保护的算法及程序需要优化以得到更准确的保护整定值及更好的保护效果。
[0004]
针对传统的故障诊断方法容易出现误判的问题,有学者提出了一种比较故障前后母线测量导纳幅值和相角变化的诊断判据,但高阻抗接地故障发生时,此诊断方法容易出现误判。为了提高故障切除的速率,有专家提出了一种反时限低阻抗保护方法,该方法无须借助通信技术,且不受微电源控制方式影响,但此方法只能判定故障区域,无法定位具体的故障相线路,导致故障切除范围扩大。基于此,有学者提出使用差分方法的特定阈值进行故障检测,故障检测时间完全取决于阈值的选择。但在多直流系统中选择阈值的困难,该值是根据运营商的经验确定的。也就是说,保护方法的是基于人的经验,而不是基于客观事实。因此本发明提出了一种基于模糊推理系统(fuzzy inference system,fis)的快速故障检测方法,来替代人的经验以此提高故障辨识精度、保护准确性和可靠性,实现综合控制保护多直流系统。
技术实现要素:
[0005]
本发明提供了一种基于模糊推理系统的快速故障检测方法,提高了故障辨识精度、保护准确性和可靠性,实现综合控制保护多直流系统。
[0006]
本发明的技术方案是:一种基于模糊推理系统的快速故障检测方法,所述方法包
括:
[0007]
发生低阻抗故障时,输入电流或输出电流都会迅速上升,表明输入电流或输出电流的变化率已变为正值;同时,分段另一侧的电流变化率变为负;将故障分类表示为模糊规则,模糊规则将被馈送到模糊推理系统fis进行决策。
[0008]
作为本发明的进一步方案,所述模糊规则包括:
[0009]
获取并监视输入电流i
in
和输出电流i
out
之间的差异;
[0010]
如果i
in
和i
out
相等,那么就不会发生故障;
[0011]
如果i
in
和i
out
减小,则没有发生故障;
[0012]
如果i
in
和i
out
增加,则没有发生故障;
[0013]
如果i
in
在增加而i
out
在减少,和发生故障;
[0014]
如果i
in
在减小而i
out
在增大,和发生故障;
[0015]
如果没有输入i
in
和i
out
,发生故障。
[0016]
作为本发明的进一步方案,所述模糊推理系统fis为mamdani模糊系统。
[0017]
本发明的有益效果是:本发明可替代人的主观行为以此提高故障辨识精度、保护准确性和可靠性,实现综合控制保护多直流系统。
附图说明
[0018]
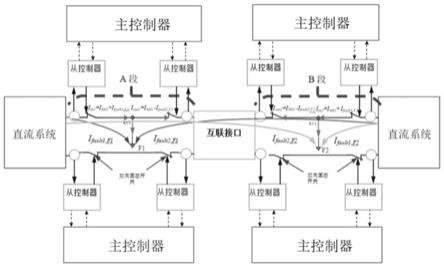
图1为本发明中的多直流系统控制结构图。
具体实施方式
[0019]
实施例1:多直流系统之间的连接方式如图1所示,其控制结构主要包含:直流系统、主控制器、从控制器、互联接口和双向固态开关。从控制器负责测量输入和输出电流,主控制器计算并监视输入和输出电流之间的差异并下达相应的控制指令;
[0020]
本发明的多直流系统模糊推理系统故障检测方法,所述方法包括:
[0021]
发生低阻抗故障时,输入电流或输出电流都会迅速上升,表明输入电流或输出电流的变化率已变为正值;同时,分段另一侧的电流变化率变为负;将故障分类表示为模糊规则,模糊规则将被馈送到模糊推理系统fis进行决策。
[0022]
作为本发明的进一步方案,所述模糊规则包括:
[0023]
获取并监视输入电流i
in
和输出电流i
out
之间的差异;
[0024]
如果i
in
和i
out
相等,那么就不会发生故障;
[0025]
如果i
in
和i
out
减小,则没有发生故障;
[0026]
如果i
in
和i
out
增加,则没有发生故障;
[0027]
如果i
in
在增加而i
out
在减少,和发生故障;
[0028]
如果i
in
在减小而i
out
在增大,和发生故障;
[0029]
如果没有输入i
in
和i
out
,发生故障。
[0030]
具体的,在直流系统中有两种常见故障,即线间(ll)故障和接地(lg)故障。ll故障
是网络中正极和负极之间发生短路的故障,而lg故障是网络中正极或负极与地面的一条线路之间发生短路的故障。针对这两种故障,本发明主要从主控制器、从控制器和续流二极管路径进行分析并基于此提出保护方案。
[0031]
主控制器计算并监视输入和输出电流之间的差异,从控制器负责测量输入和输出电流:
[0032]
i
diff
=i
in-i
out
[0033]
其中,i
in
和i
out
是每个直流母线段的输入和输出电流;利用阈值来检测故障,该值是根据操作员的经验指定的,显然会影响故障检测速度。每条直流母线均受到持续监控,并通过两个从属控制器测量其电流。主控制器故障检测的速度和精度取决于故障检测算法。
[0034]
考虑以下两种情况:
[0035]
1)高阈值
[0036]
2)低阈值
[0037]
在第一种情况下,假定设置了高阈值。故障电流大小取决于系统电阻和故障电流路径。如果故障位置的阻抗很高或故障电流路径中存在高电阻,则故障电流的峰值会降低。因此,主控制器将无法检测高阻抗故障。
[0038]
另一方面,可以减小阈值以克服该问题。降低阈值会导致主控制器做出错误决定,并由于电源摆幅而使系统跳闸,而实际上却未发生任何故障。在阈值设置得较低的情况下,故障检测的精度较低。因此,建议在决策单元中添加另一标准作为专家系统。基于模糊逻辑,fis尝试针对任何系统模式做出最佳决策。
[0039]
下面介绍并指定用于连接到多直流系统互连系统的系统故障检测的另一条准则。将智能模糊控制器替代先前的主控制器,在该控制器中,它可以尽快检测到故障。
[0040]
关于低阻抗故障检测中差动电流变化率的确定标准和电流方向的确定标准:
[0041]
为了定义新标准,假设低阻抗故障(例如f1)发生在a段(图1中的a段)中,到故障段的输入电流计算如下。
[0042]
输入电流:
[0043]
i
in
=i
μg
+i
fault1,f1
[0044]
其中,i
μg
是流入直流系统的电流;i
fault1,f1
是由于发生f1而进入故障点的故障电流。
[0045]
故障的输出电流确定如下:
[0046]
输出电流:
[0047]
i
out
=i
μg
+i
fault2,f1
[0048]
其中,i
μg
是流入直流系统的电流;i
fault2,f1
是从段b进入故障点的故障电流;
[0049]
这些电流在图1中已标出,由此可以推断出,在低阻抗故障条件下,由于故障电流增加到了i
μg
,导致直流系统上的电流变大。但是,负载侧的电流会减小。因此,可以得出以下两种模式(表1)。
[0050]
表1各段的输入输出电流条件
[0051]
正常状态故障情况i
in
=i
mg
i
in
>i
mg
i
out
=i
mg
i
out
<i
mg
[0052]
在正常情况下,流经每个段的电流是相同的。当发生低阻抗故障时,输入或输出电流都会迅速上升,这表明其变化率已变为正值。同时,分段另一侧的电流变化率变为负。将分类表示为规则,该规则将被馈送到fis,以便随时根据这些规则进行决策。
[0053]
针对多直流系统提出的fis保护方案的具体而准确的形式如下:
[0054]
·
规则1:如果i
in
和i
out
相等,那么就不会发生故障。
[0055]
·
规则2:如果i
in
和i
out
减小,则没有发生故障。
[0056]
·
规则3:如果i
in
和i
out
增加,则没有故障发生。
[0057]
·
规则4:如果i
in
在增加而i
out
在减少(和),发生故障。
[0058]
·
规则5:如果i
in
减小而i
out
增大,(和),发生故障。
[0059]
·
规则6:如果没有输入i
in
和i
out
,则即使没有其他规则成立,也将发生故障。这6条规则可帮助fis根据电流变化率和电流方向准则来做出最合适,最精确的决策。表2和表3中包含6条规则作为新准则,用于确定建议的fis方案。当前方向准则优先于变化率准则,并且如果基于当前方向检测到故障,则不会计算其他准则的输出,并且不会立即检测到故障。表2和表3中的√符号表示更重要的输出,意味着故障的发生是确定的。提出的fis方案是主控制器,而差分方法则充当监督此智能系统的备用控制器,是保护系统的最后一层,并在算法主要层中起着备用的作用。
[0060]
表2每个部分的当前方向
[0061]
i
in
方向i
out
方向故障情况流入流出
×
流出流入
×
流入流入√
[0062]
表3每个部分的当前变化率
[0063]
i
in
i
out
故障情况00
×
减小减小
×
增加增加
×
增加减小√减小增加√
[0064]
模糊推理系统(fis)只能以描述性和经验性规则的形式来表达现象或过程的行为,而无需识别精确的分析模型。与回归和神经网络模型相反,甚至fis也可以用于模拟没有过程数据的过程行为。因此,fis是使用特定且准确的规则来制定流程的工具,如果条件为“p”,则为“q”条件(规则1至6)。本发明使用的fis类型为mamdani模糊系统,其结构如下:
[0065]
r
i
:如果x1是和(或)x2是和(或)x
m
是然后
[0066]
模糊规则用于确定适当的输出,该输出针对保护算法进行了定义,并使用“and”和“or”运算符以及重心(cog)方法进行构造。旨在对测量数据(每个段的输入和输出电流)进行模糊化和去模糊化的隶属度函数是三角分布的,它们的等距分布为[-1,1]。为避免决策
中的错误,故障发生确认的连续周期数也定义为3个周期。换句话说,当至少一个模糊规则引起三个连续的仿真步骤时,则由主控制器发出故障发生命令。
[0067]
本发明通过对多直流系统的故障识别并在此基础上进行保护动作,实现综合控制保护多直流系统。
[0068]
上面结合附图对本发明的具体实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1