一种岸基多通道雷达仿机载数据诊断方法与流程
[0001]
本发明属于海杂波测量领域,特别涉及该领域中的一种岸基多通道雷达仿机载数据诊断方法。
背景技术:
[0002]
为深入分析海杂波空时二维特性,可由岸基多通道雷达利用逆相位中心偏置原理实现仿机载运动,但因多通道雷达系统复杂度高、仿机载工作模式实现控制参数多、空时耦合性验证难,故而诊断仿机载数据是否有效成为在海杂波空时二维特性分析方面目前亟需解决的问题之一。
[0003]
与单通道海杂波测量雷达数据处理方法相比,多通道仿机载雷达面临以下几个难题:通道间幅相一致性如何判断、发射子阵移动如何判断、发射子阵对应的方向图一致性如何判断、相参处理单元中包含的脉冲相参性如何判断以及仿机载测量下的空时耦合特性如何判断。解决了上述几个难题,方可诊断仿机载数据的有效性。
[0004]
目前,国内尚无岸基多通道雷达能作为仿机载海杂波测量平台,更谈不上仿机载数据诊断方案,美国山顶计划虽给出了已预处理完成的含有一个相参脉冲串的仿机载数据,但仅通过空时功率谱验证了数据的空时耦合特性,对仿机载模式下的发射子阵移动和发射子阵对应的天线方向一致性并无考虑。
技术实现要素:
[0005]
本发明所要解决的技术问题就是提供一种岸基多通道雷达仿机载数据诊断方法。
[0006]
本发明采用如下技术方案:
[0007]
一种岸基多通道雷达仿机载数据诊断方法,其改进之处在于,包括如下步骤:
[0008]
步骤1,通道间幅相一致性诊断:
[0009]
基于通道回波数据的一维幅值和相位,初步判断通道间幅相是否一致,具体步骤为:
[0010]
步骤11,通道间幅度一致性诊断:采用全阵合成工作模式,对所有通道回波数据进行多个脉冲幅值平均,查看所有通道的一维回波幅值差异,如果通道间幅值差异大,则说明通道间幅度不一致,如果通道间幅值差异小,判断通道间幅度一致;
[0011]
步骤12,通道间相位一致性诊断:采用全阵合成工作模式,比较所有通道数据的某个无干扰脉冲对应距离采样点对应的相位值,如果通道间的相位值差异大,则说明通道间相位不一致,如果通道间的相位值差异小,判断通道间相位一致;
[0012]
步骤2,发射子阵移动诊断:
[0013]
根据相邻相参处理单元的多普勒谱是否模糊来判断发射子阵是否移动,具体步骤为:
[0014]
步骤21,选取某一通道回波中同一距离采样点对应的两个相邻相参处理单元的数据;
[0015]
步骤22,对步骤21中的数据进行傅里叶变换,对多个距离单元进行同样的操作,得到距离—多普勒谱,如果在多普勒谱中心周围出现多个峰值,即可判断发射子阵移动;
[0016]
步骤3,发射子阵方向图一致性诊断:
[0017]
基于发射子阵依次发射,接收阵列全阵接收的仿机载运动原理,从回波数据可判断发射子阵方向图是否满足一致性,具体步骤为:
[0018]
步骤31,基于原始测量数据,以相参处理单元中脉冲数、距离采样点、通道对应的相位中心为3个数据维度,组成仿机载数据对应的三维数据矩阵;
[0019]
步骤32,选定某一距离单元,基于快速傅里叶变换,对脉冲维中每个脉冲对应的相位中心进行波束合成,得到发射子阵对应的发射接收双程方向图;
[0020]
步骤33,比较步骤32中得到的各发射子阵对应的发射接收双程天线方向图,判断发射子阵方向图是否满足一致性,如果各个相参脉冲对应的发射接收方向图一致,由于各个相参脉冲对应的接收方向图一致,即可判断各个相参脉冲对应的发射方向是一致的;
[0021]
步骤4,相参处理单元中脉冲相参性诊断:
[0022]
相参处理单元中脉冲相参性通过单通道中各脉冲相参性比较和多通道中各脉冲相参性比较进行诊断,具体步骤为:
[0023]
步骤41,单通道中脉冲相参性诊断:基于步骤3中建立的三维数据矩阵,逐通道对相参处理单元中每个脉冲在距离维进行平均,得到通道—脉冲矩阵,比较各通道中脉冲幅值,如果各脉冲幅值差异不大,说明单通道中脉冲相参性高,否则需进一步分析;
[0024]
步骤42,多通道中脉冲相参性诊断:基于步骤3中建立的三维数据矩阵,逐距离维对相位中心维和脉冲维进行先时后空的数据向量排列,得到多个距离对应的空时快拍;基于得到的距离—空时快拍矩阵,查看该矩阵对应的伪彩色图,比较各空时自由度对应的幅值,如果各空时自由度对应幅值差异不大,即可说明各通道中脉冲相参性高,否则需进一步分析;
[0025]
步骤5,空时耦合性诊断:
[0026]
基于步骤4中空时快拍运算得到空时协方差矩阵,进行空时耦合性诊断,具体步骤为:
[0027]
步骤51,基于噪声空时协方差矩阵诊断数据空时耦合性:对空照射录取仿机载模式下的噪声数据,基于步骤4中的空时快拍,计算空时快拍对应的空时协方差矩阵,如果协方差矩阵大值呈对角线分布,即可说明仿机载模式下杂波数据空时耦合性良好;
[0028]
步骤52,基于杂波空时功率谱诊断数据空时耦合性:对地面或海面照射,录取仿机载模式杂波数据,基于步骤4中的空时快拍,计算空时快拍对应的空时协方差矩阵,并在此基础上经过空时二维处理得到杂波的空时功率谱,如果杂波空时功率谱出现沿对角线分布的杂波脊现象,说明仿机载模式下杂波数据空时耦合性良好。
[0029]
本发明的有益效果是:
[0030]
本发明所公开的岸基多通道雷达仿机载数据诊断方法,通过诊断通道间幅相一致性、发射子阵移动、发射子阵方向图一致性、相参处理单元中脉冲相参性以及空时耦合特性,大大提高仿机载数据有效性诊断效率,为后续海杂波空时二维特性分析奠定数据基础。
附图说明
[0031]
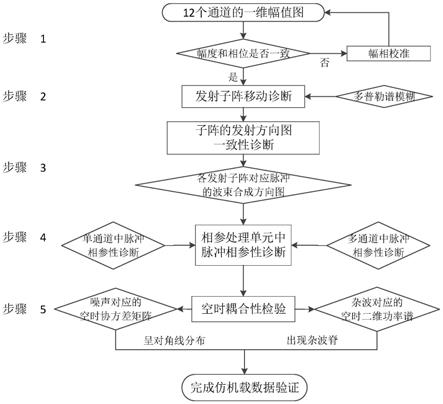
图1是本发明实施例1所公开方法的流程示意图;
[0032]
图2是距离—多普勒谱图;
[0033]
图3是不同相参脉冲对应的双程方向图;
[0034]
图4是12通道在同一距离单元下的数据图;
[0035]
图5是杂波区域对应的空时快拍矩阵串;
[0036]
图6是噪声协方差矩阵;
[0037]
图7是杂波空时功率谱。
具体实施方式
[0038]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0039]
实施例1,如图1所示,本实施例公开了一种岸基多通道雷达仿机载数据诊断方法,基于仿机载运动原理,根据回波数据诊断各通道间的幅相一致性、发射子阵移动、发射子阵对应天线方向图一致性以及仿机载运动下各相参脉冲的相参性,判定仿机载模式下海杂波数据的有效性,确保仿机载模式下海杂波数据呈现空时耦合特性,具体包括如下步骤:
[0040]
步骤1,通道间幅相一致性诊断:
[0041]
基于通道回波数据的一维幅值和相位,初步判断通道间幅相是否一致,具体步骤为:
[0042]
步骤11,通道间幅度一致性诊断:采用全阵合成工作模式,对所有通道回波数据进行多个脉冲幅值平均,查看所有通道的一维回波幅值差异,如果通道间幅值差异大,则说明通道间幅度不一致,如果通道间幅值差异小,判断通道间幅度一致;
[0043]
步骤12,通道间相位一致性诊断:采用全阵合成工作模式,比较所有通道数据的某个无干扰脉冲对应距离采样点对应的相位值,如果通道间的相位值差异大,则说明通道间相位不一致,如果通道间的相位值差异小,判断通道间相位一致;
[0044]
步骤2,发射子阵移动诊断:
[0045]
基于仿机载运动下的相邻相参处理单元的相位中心差异大的特点,根据相邻相参处理单元的多普勒谱是否模糊来判断发射子阵是否移动,具体步骤为:
[0046]
步骤21,选取某一通道回波中同一距离采样点对应的两个相邻相参处理单元的数据;
[0047]
步骤22,对步骤21中的数据进行傅里叶变换,对多个距离单元进行同样的操作,得到距离—多普勒谱,如图2所示,如果在多普勒谱中心周围出现多个峰值,即可判断发射子阵移动;
[0048]
步骤3,发射子阵方向图一致性诊断:
[0049]
基于发射子阵依次发射,接收阵列全阵接收的仿机载运动原理,从回波数据可判断发射子阵方向图是否满足一致性,具体步骤为:
[0050]
步骤31,基于原始测量数据,以相参处理单元中脉冲数、距离采样点、通道对应的相位中心为3个数据维度,组成仿机载数据对应的三维数据矩阵;
[0051]
步骤32,选定某一距离单元,基于快速傅里叶变换,对发射子阵脉冲维中每个脉冲对应的相位中心进行波束合成,得到发射子阵对应的发射接收双程方向图;
[0052]
步骤33,比较步骤32中得到的各发射子阵对应的发射接收双程天线方向图,如图3所示,以发射子阵含1列子阵、全阵列数为12、相邻发射子阵移动1列为例说明,判断发射子阵方向图是否满足一致性,如果12个相参脉冲对应的发射接收方向图一致,由于12个相参脉冲对应的接收方向图一致,即可判断12个相参脉冲对应的发射方向是一致的;
[0053]
步骤4,相参处理单元中脉冲相参性诊断:
[0054]
相参处理单元中脉冲相参性通过单通道中各脉冲相参性比较和多通道中各脉冲相参性比较进行诊断,具体步骤为:
[0055]
步骤41,单通道中脉冲相参性诊断:基于步骤3中建立的三维数据矩阵,逐通道对相参处理单元中每个脉冲在距离维进行平均,得到通道—脉冲矩阵,比较各通道中脉冲幅值,如果各脉冲幅值差异不大,说明单通道中脉冲相参性高,如图4所示,以发射子阵包含1列子阵、全阵列数为12、发射子阵移动1列为例说明该步骤,第9个脉冲与其它11个脉冲幅值差异较大,即可诊断第9个相参脉冲与其余脉冲的相参性低,需进一步分析;
[0056]
步骤42,多通道中脉冲相参性诊断:基于步骤3中建立的三维数据矩阵,逐距离维对相位中心维和脉冲维进行先时(脉冲维)后空(相位中心维)的数据向量排列,得到多个距离对应的空时快拍;基于得到的距离—空时快拍矩阵,查看该矩阵对应的伪彩色图,比较各空时自由度对应的幅值,如果各空时自由度对应幅值差异不大,即可说明各通道中脉冲相参性高,以空域自由度为12、时域自由度为12为例说明该步骤,如图5所示,图5中空时自由度为81的地方出现异常,结合步骤41可知,相参处理单元中的第5个脉冲与其余脉冲相参性不高,需进一步分析;
[0057]
步骤5,空时耦合性诊断:
[0058]
基于步骤4中空时快拍运算得到空时协方差矩阵,进行空时耦合性诊断,具体步骤为:
[0059]
步骤51,基于噪声空时协方差矩阵诊断数据空时耦合性:对空照射录取仿机载模式下的噪声数据,基于步骤4中的空时快拍,计算空时快拍对应的空时协方差矩阵,如果协方差矩阵大值呈对角线分布,即可说明仿机载模式下杂波数据空时耦合性良好,如图6所示;
[0060]
步骤52,基于杂波空时功率谱诊断数据空时耦合性:对地面或海面照射,录取仿机载模式杂波数据,基于步骤4中的空时快拍,计算空时快拍对应的空时协方差矩阵,并在此基础上经过空时二维处理得到杂波的空时功率谱,如果杂波空时功率谱出现沿对角线分布的杂波脊现象,说明仿机载模式下杂波数据空时耦合性良好,如图7所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1