一种岩土工程勘察用可测深度的岩土取样装置及方法与流程
[0001]
本发明涉及岩土勘察技术领域,尤其涉及一种岩土工程勘察用可测深度的岩土取样装置,本发明还涉及该取样装置的取样方法。
背景技术:
[0002]
工程建设过程中,岩土工程的勘察质量要求越来越高,人们对地下岩、土体的探求欲望也越来越大,因此需对某深度处的岩、土体进行取样,测试其物理力学参数。样品质量能够显著影响其物理力学参数,进而影响建设项目的安全性和造价,因此取样器的类型以及其正确、合理选择对样品质量至关重要。
[0003]
在现有的地质钻探中,常用的钻机基本包括柴油机及卷扬机,机身笨重,达几百千克,而大部分工地都不能机械搬运,纯靠人力,给钻探工作带来极大不便,同时在钻孔的过程中不能够对于不同深度的岩土进行取样带回室内测试,即只能进行一次取样,在对于不同深度的岩土层时,取样装置要重复的取样工作,效率极低,而且取样的深度位置需要人工进行预判,在一定程度上降低了测量的准确性,极易导致岩土工程勘察取样数据的准确性。因此,有必要提供一种新的技术方案改善上述方案中存在的一个或者多个问题。
[0004]
需要注意的是,本部分旨在为权利要求书中陈述的本发明的实施方式提供背景或上下文。此处的描述不因为包括在本部分中就承认是现有技术。
技术实现要素:
[0005]
本发明的目的在于提供一种岩土工程勘察用可测深度的岩土取样装置,进而至少在一定程度上克服由于相关技术的限制和缺陷而导致的一个或者多个问题。
[0006]
本发明的另一个目的在于提供上述取样装置的取样方法。
[0007]
本发明技术方案为:一种岩土工程勘察用可测深度的岩土取样装置,包括一钻杆,还包括:
[0008]
伸缩部,设置于地面上,与钻杆活动连接,用于带动钻杆进行竖直往复移动;
[0009]
取样部,设置于钻杆下方,并与钻杆下端活动连接,该取样部包括多个刮刀部及微型电机,以通过该微型电机的驱动使得刮刀部部分伸出取样部,以刮取预设深度处的岩土土样,并使得刮落的该岩土土样流入取样部内;
[0010]
传输部,位于钻杆中空处,且下端部通过一移动部与钻杆的下端部连接,该移动部用于驱动该传输部下端部与取样部相接触,以将取样部采集的岩土土样传输至地面;
[0011]
钻头,设置于取样部下方;
[0012]
驱动部,设置于取样部与钻头之间,用于驱动取样部与钻头旋转;
[0013]
控制机构,与伸缩部电连接,并在该取样装置位于预设深度时向伸缩部发送第一预设指令;与微型电机电连接,并在该取样装置位于预设深度时向该微型电机发送第二预设指令;与移动部电连接,并在该取样装置达到预设深度时且在经过预设时长后向移动部发送第三预设指令;与驱动部电连接,用于控制钻头进行转动,以及在取样部取样时控制取
样部进行转动;
[0014]
位移传感器,设置于伸缩部上,并与控制机构电连接,以将伸缩部的伸缩距离信号发送至控制机构。
[0015]
本发明的实施例中,伸缩部包括两个液压伸缩杆,且该两个液压伸缩杆之间设置有收紧部,该收紧部用于与钻杆接触,以带动钻杆上移或下移。
[0016]
本发明的实施例中,收紧部包括两个气动伸缩杆,且该气动伸缩杆的一端分别相对设置于两个液压伸缩杆的顶端,该气动伸缩杆的另一端部固定设有一弧形板,以通过相对的两个弧形板包裹钻杆。
[0017]
本发明的实施例中,弧形板朝向钻杆的弧面设有橡胶垫,且该橡胶垫表面设有多个凸起。
[0018]
本发明的实施例中,取样部包括:
[0019]
柱状容纳腔,沿周向开设有四个取样孔;
[0020]
方形转盘,通过微型电机设置于柱状容纳腔内,且该方形转盘沿各边长方向依次设置有四个刮刀部,且该刮刀部的刮刀片位于柱状容纳腔的取样孔处;
[0021]
其中,刮刀部沿方形转盘边缘处至刮刀片的方向呈螺旋上升,且该刮刀部沿螺旋方向设有取样槽。
[0022]
本发明的实施例中,方形转盘在微型电机的驱动下进行转动,从而使得四个刮刀部从取样孔伸出,当驱动部驱动取样部旋转时,刮刀片将进行旋转以将预设深度处的岩土刮下,且刮下的岩土土样将从取样槽滑下并汇集在方形转盘处。
[0023]
本发明的实施例中,传输部为软管绞龙;软管绞龙下端部通过移动部与钻杆下端部连接,该移动部能够驱动软管绞龙上下移动,从而使得该软管绞龙端部与方形转盘接触,从而将方形转盘上汇集的岩土土样上传至地面;和/或,移动部为四根气动伸缩杆。
[0024]
本发明的实施例中,钻杆下端部与取样部连接处设有推力球轴承,以使得该取样部能够相对于钻杆进行转动。
[0025]
本发明的实施例中,第一预设指令包括伸缩部停止移动指令、伸缩部与钻杆分离状态下的移动指令;和/或,第二预设指令包括微型电机的驱动及驱动复原指令;和/或,第三预设指令包括移动部的驱动及驱动复原指令。
[0026]
应用于上述岩土工程勘察用可测深度的岩土取样装置的取样方法,包括:
[0027]
使钻杆通过伸缩部的驱动而进行竖直方向的移动;
[0028]
控制机构接收位移传感器发送的信号,并计算岩土取样装置所达到的深度;若该深度为预设值,则发送第一预设指令,使得伸缩部控制钻杆停止在竖直方向的移动;
[0029]
控制机构发送第二预设指令,使得微型电机进行驱动作业,使得刮刀部伸出取样部;然后向驱动部发送指令,驱动取样部进行转动,从而使得刮刀部进行取样作业;
[0030]
控制机构发送第三预设指令,使得移动部驱动传输部与取样部接触,以将取样部采集的岩土土样传输至地面。
[0031]
本发明提供的技术方案具有以下有益效果:
[0032]
本发明提供的岩土工程勘察用可测深度的岩土取样装置,通过伸缩部、位移传感器、控制机构的配合使用,能够轻易的获知取样装置到达的深度;通过取样部、传输部、驱动部及控制机构的配合使用,不仅能够获得不同深度层的岩土土样,而且能够在不用重复提
拉取样装置的前提下将岩土土样传输至地面,使该取样装置更加智能化,而且更便于人员操作。
附图说明
[0033]
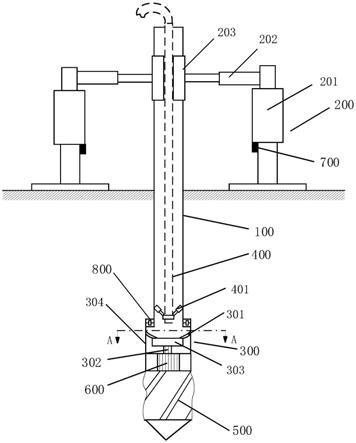
图1示出本发明示例性实施例中岩土取样装置的结构示意图;
[0034]
图2示出本发明示例性实施例中岩土取样装置的局部俯视示意图;
[0035]
图3示出本发明示例性实施例中岩土取样方法的流程图。
[0036]
图中:钻杆100;伸缩部200;液压伸缩杆201;收紧部202;弧形板203;取样部300;刮刀部301;微型电机302;方形转盘303;柱状容纳腔304;传输部400;移动部401;钻头500;驱动部600;位移传感器700;推力球轴承800。
具体实施方式
[0037]
现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本发明将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施方式中。
[0038]
此外,附图仅为本发明的示意性图解,并非一定是按比例绘制。图中相同的附图标记表示相同或类似的部分,因而将省略对它们的重复描述。附图中所示的一些方框图是功能实体,不一定必须与物理或逻辑上独立的实体相对应。
[0039]
本示例实施方式中首先提供了一种岩土工程勘察用可测深度的岩土取样装置。参考图1中所示,该装置可以包括:伸缩部200、取样部、传输部400、钻头500、驱动部600、控制机构和位移传感器700。
[0040]
伸缩部200设置于地面上,与钻杆100活动连接,用于带动钻杆100进行竖直往复移动;取样部设置于钻杆100下方,并与钻杆100下端活动连接,该取样部包括多个刮刀部301及微型电机302,以通过该微型电机302的驱动使得刮刀部301部分伸出取样部,以刮取预设深度处的岩土土样,并使得刮落的该岩土土样流入取样部内;传输部400位于钻杆100中空处,且下端部通过一移动部401与钻杆100的下端部连接,该移动部401用于驱动该传输部400下端部与取样部相接触,以将取样部采集的岩土土样传输至地面;钻头500设置于取样部下方;驱动部600设置于取样部与钻头500之间,用于驱动取样部与钻头500旋转;控制机构与伸缩部200电连接,并在该取样装置位于预设深度时向伸缩部200发送第一预设指令;与微型电机302电连接,并在该取样装置位于预设深度时向该微型电机302发送第二预设指令;与移动部401电连接,并在该取样装置达到预设深度时且在经过预设时长后向移动部401发送第三预设指令;与驱动部600电连接,用于控制钻头500进行转动,以及在取样部取样时控制取样部进行转动;位移传感器700设置于伸缩部200上,并与控制机构电连接,以将伸缩部200的伸缩距离信号发送至控制机构。
[0041]
根据上述实施例提供的岩土工程勘察用可测深度的岩土取样装置,通过伸缩部200、位移传感器700、控制机构的配合使用,能够轻易的获知取样装置到达的深度;通过取样部、传输部400、驱动部600及控制机构的配合使用,不仅能够获得不同深度层的岩土土样,而且能够在不用重复提拉取样装置的前提下将岩土土样传输至地面,使该取样装置更
加智能化,而且更便于人员操作。
[0042]
下面,将参考图1至图2对本示例实施方式中的上述岩土工程勘察用可测深度的岩土取样装置的各个部分进行更详细的说明。
[0043]
在一个实施例中,伸缩部200设置在地面上,并与钻杆100连接,带动钻杆100进行上下运动,并且该伸缩部200还设有一位移传感器700,该位移传感器700能够获知伸缩部200向下移动的距离,并将该下移的距离信号发送至控制机构,控制机构通过计算得到岩土取样装置的下移深度,从而能够通过预先输入的取样深度层发布命令。需要说明的是,因伸缩部200高度有限,而钻杆100高度远大于伸缩部200的高度,因此,当伸缩部200带动钻杆100向下至伸缩部200的极限后,伸缩部200将松开钻杆100向上移动到极限值后,又重新带动钻杆100向下移动。
[0044]
当取样装置到达预设深度后,控制机构将发布各种指令以进行岩土土样的采集,首先发布第一预设指令,即使得伸缩部200停止移动,使钻杆100停止于预设深度处;然后发布第二预设指令,使得位于钻杆100下方的取样部内设置的微型电机302能够进行驱动作业,该驱动作业能够使得取样部内设置的刮刀部301部分伸出取样部;然后向驱动部600发送指令,驱动部600位于取样部下方,而钻头500位于驱动部600下方,该驱动部600具体为电机,不仅能够带动钻头500进行钻进工作,而且能够带动取样部进行转动,当取样部转动后,伸出取样部的刮刀部301能够对周边的岩土进行刮取,刮下的岩土能够顺着刮刀部301流入取样部内。控制机构发布第三预设指令,使得传输部400通过移动部401的驱动与取样部相接触,该传输部400从钻杆100顶部伸入,并通过钻杆100中空处,通过移动部401设置于钻杆100下端处,该传输部400能够将流入取样部的岩土土样进行收集,并将该土样上传至地面,该种设置不仅能够采集任意深度的岩土土样,不需要采样装置进行往复的采样工作,并且更加智能化,易于人员操作。
[0045]
在一个实施例中,伸缩部200包括两个液压伸缩杆201,且该两个液压伸缩杆201之间设置有收紧部202,该收紧部202用于与钻杆100接触,以带动钻杆100上移或下移。具体的,收紧部202能够与钻杆100紧密接触以随液压伸缩杆201的移动而移动,当液压伸缩杆201运动到极限时,收紧部202需要与钻杆100分开,使得液压伸缩杆201恢复至原位置,再通过收紧部202压紧钻杆100以随液压伸缩杆201进行上下移动。
[0046]
在一个实施例中,收紧部202包括两个气动伸缩杆,且该气动伸缩杆的一端分别相对设置于两个液压伸缩杆201的顶端,该气动伸缩杆的另一端部固定设有一弧形板203,以通过相对的两个弧形板203包裹钻杆100。具体的,气动伸缩杆一端与液压伸缩杆201的顶端固定连接,气动伸缩杆能够进行左右移动,以通过相对的两个弧形板203将位于中间的钻杆100进行包裹挤压,以使得钻杆100能够随液压伸缩杆201的移动而移动,可给钻杆100钻进时向下的力,也可通过该液压伸缩杆201将钻杆100拔出。
[0047]
在一个实施例中,弧形板203朝向钻杆100的弧面设有橡胶垫,且该橡胶垫表面设有多个凸起。具体的,为增大弧形板203与接触的钻杆100之间的摩擦力,在弧形板203的一侧设置橡胶垫,并且在橡胶垫上设置多个凸起,具体凸起的数量可根据实际情况进行设置,再次不作具体限制。
[0048]
在一个实施例中,取样部包括柱状容纳腔304和方形转盘303。柱状容纳腔304,沿周向开设有四个取样孔;方形转盘303,通过微型电机302设置于柱状容纳腔304内,且该方
形转盘303沿各边长方向依次设置有四个刮刀部301,且该刮刀部301的刮刀片位于柱状容纳腔304的取样孔处;其中,刮刀部301沿方形转盘303边缘处至刮刀片的方向呈螺旋上升,且该刮刀部301沿螺旋方向设有取样槽。
[0049]
具体的,柱状容纳腔304设置于钻杆100的下方,并与钻杆100活动连接,该方形转盘303通过微型电机302设置于柱状容纳腔304内,且刮刀部301沿方形转盘303的边长方向设置,当方形转盘303在微型电机302的驱动下转动时,因刮刀部301的特殊设置,能够使在正常状态下处于取样孔处的刮刀片轻易的伸出取样部,以便于进行岩土的刮取工作。另外,为便于刮取及使得刮取的岩土土样落入方形转盘303内,该刮刀部301沿方形转盘303的边缘处至刮刀片的方向呈螺旋形上升,并且在螺旋方向设有取样槽,即滑槽,以便于刮取的岩土土样流入方形转盘303内。
[0050]
在一个实施例中,方形转盘303在微型电机302的驱动下进行转动,从而使得四个刮刀部301从取样孔伸出,当驱动部600驱动取样部旋转时,刮刀片将进行旋转以将预设深度处的岩土刮下,且刮下的岩土土样将从取样槽滑下并汇集在方形转盘303处。
[0051]
具体的,当刮刀片伸出取样部后,驱动部600驱动取样部进行旋转,从而带动刮刀片进行转动,能够很轻易将预设深度处的岩土土样刮下,刮下的土样能够顺着取样槽滑落汇集到方形转盘303处。需要说明的是,当刮刀部301在起始状态,即刮刀片位于取样孔时,为防止取样装置在钻进过程中岩土通过取样孔进入取样部,可将刮刀片的形状与取样孔适配,可将刀片的朝向与取样孔切线的方向设为一致,当刮刀片伸出时,需控制取样部的旋转方向与刮刀片的刀片朝向一致,才可将岩土刮下,但不做具体限制。
[0052]
在一个实施例中,传输部400为软管绞龙;软管绞龙下端部通过移动部401与钻杆100下端部连接,该移动部401能够驱动软管绞龙上下移动,从而使得该软管绞龙端部与方形转盘303接触,从而将方形转盘303上汇集的岩土土样上传至地面;和/或,移动部401为四根气动伸缩杆。
[0053]
具体的,软管绞龙的下端通过四根气动伸缩杆与钻杆100的下端部连接,且气动伸缩杆固定于钻杆100内壁上,气动伸缩杆与软管绞龙活动连接。在钻杆100钻进的过程中,软管绞龙处于略高于上述方形转盘303的位置,当取样完成后,软管绞龙通过气动伸缩杆的驱动下移至方形转盘303,并将采集的岩土土样通过软管绞龙传输至地面。需要说明的是,方形转盘303用于收集岩土土样的腔体可与软管绞龙形状适配,在此不做限制。
[0054]
在一个实施例中,钻杆100下端部与取样部连接处设有推力球轴承800,以使得该取样部能够相对于钻杆100进行转动。具体的,通过推力球轴承800将钻杆100与取样部进行连接,该种设置能够使得取样部与钻杆100发生相对转动,而且结构更加简单。
[0055]
在一个实施例中,第一预设指令包括伸缩部200停止移动指令、伸缩部200与钻杆100分离状态下的移动指令;和/或,第二预设指令包括微型电机302的驱动及驱动复原指令;和/或,第三预设指令包括移动部401的驱动及驱动复原指令。具体指令的实施过程可参考上述实施例进行理解,在此不做赘述。
[0056]
本示例实施方式中还提供了上述岩土工程勘察用可测深度的岩土取样装置的取样方法。参考图3中所示,该方法包括:
[0057]
步骤s101,使钻杆100通过伸缩部200的驱动而进行竖直方向的移动。
[0058]
步骤s102,控制机构接收位移传感器700发送的信号,并计算岩土取样装置所达到
的深度;若该深度为预设值,则发送第一预设指令,使得伸缩部200控制钻杆100停止在竖直方向的移动。
[0059]
步骤s103,控制机构发送第二预设指令,使得微型电机302进行驱动作业,使得刮刀部301伸出取样部;然后向驱动部600发送指令,驱动取样部进行转动,从而使得刮刀部301进行取样作业。
[0060]
步骤s104,控制机构发送第三预设指令,使得移动部401驱动传输部400与取样部接触,以将取样部采集的岩土土样传输至地面。
[0061]
具体岩土工程勘察用可测深度的岩土取样方法的实施过程可参考上述实施例进行理解,在此不再赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1