一种断层三维数字化检测方法与流程
[0001]
本发明涉及地震勘探中地震数据解释技术领域,特别涉及一种断层三维数字化检测方法。
背景技术:
[0002]
断层表面由自由曲面构成,它的表面形态直接关系到面波勘探调查和近断层地震作用下的土质边坡动力响应等问题,所以精度要求高且数据信息量大,传统的三坐标测量方法精度低、耗时长,不能满足要求,因此断层表面形态的检测更趋向于逆向工程。对于断层表面形态的自由曲面测量是将三坐标测量技术移植到地震物理模拟中的关键。地壳岩层因受力达到一定强度而发生破裂,并沿破裂面有明显相对移动的构造称断层。
[0003]
地震往往是由断层活动引起的,是断层活动的一种变现,而隧道穿越或接近断层场地会加剧地震动力反应,导致围岩稳定性降低,引起衬砌的整体或局部的破环,断层与隧道的相对位置关系不同,引起的地震应力也不同,因此有必要对断层进行有效的检测,减小地震造成的危害性。
[0004]
现有的断层检测时无法精确地对不同结构断层的方位和轮廓做进一步地标记和比对,同时无法对微小断层或其他不同范围的断层进行有效检测。
[0005]
针对上述问题,本发明提出了一种断层三维数字化检测方法,它具有能精确地对不同结构断层的方位和轮廓做进一步地标记和比对,同时能够对微小断层或其他不同范围的断层进行有效检测等优点。
技术实现要素:
[0006]
本发明的目的在于提供一种断层三维数字化检测方法,利用dmis技术建立地震超前观测模型,并采集和处理地震数据,开始利用探测仪器进行断层探测实验,通过pet彩色图像技术向断层表面发射彩色光源,并判断断层位置,利用键入四点边界方法对断层进行自动测量,并加以记录,对测量结果进行数据处理并对结果进行自行比对,它具有能精确地对不同结构断层的方位和轮廓做进一步地标记和比对,同时能够对微小断层或其他不同范围的断层进行有效检测等优点,可以解决上述背景技术中提出的问题。
[0007]
为实现上述目的,本发明提供如下技术方案:一种断层三维数字化检测方法,包括以下步骤:
[0008]
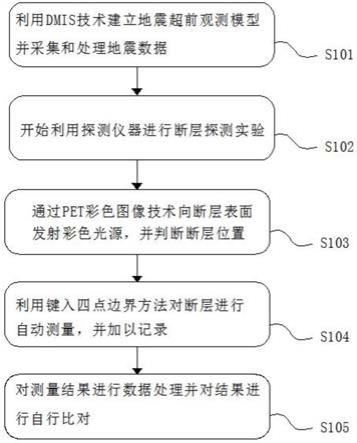
s101:利用dmis技术建立地震超前观测模型,并采集和处理地震数据;
[0009]
s102:开始利用探测仪器进行断层探测实验;
[0010]
s103:通过pet彩色图像技术向断层表面发射彩色光源,并判断断层位置;
[0011]
s104:利用键入四点边界方法对断层进行自动测量,并加以记录;
[0012]
s105:对测量结果进行数据处理并对结果进行自行比对。
[0013]
进一步地,针对步骤s102,还包括以下步骤:
[0014]
s1021:探测仪器选用ph10m测头,且测头包括三个电子接触器,前端红宝石探针以
及自动旋转测座;
[0015]
s1022:利用探针接触被测物体并使探针偏转一定角度,并至少断开一个接触器;
[0016]
s1023:利用机器读出此时的x、y、z光栅,并记录此时探针所检测到的标准球的球心位置;
[0017]
s1024:从标准球上重取五点进行重新校正,以此消除误差,同时更换探测角度再重复步骤s1022和s1023。
[0018]
进一步地,针对步骤s1021,ph10m测头采用偏心转动远离,且测量软件显示的坐标数据不是测量灯光栅数据,而是红宝石球中心数据。
[0019]
进一步地,针对步骤s1024,既可利用重取五点进行校正也可以在测量前将全部使用的角度预先校准完全后再进行测量,无需再重新进行校正。
[0020]
进一步地,针对步骤s1024,还包括以下步骤:
[0021]
s10241:在断层处更换测头角度,并将其初步确定为40度;
[0022]
s10242:记录更换角度时的两点坐标,并将断层部分作为一个独立五边形进行测量;
[0023]
s10243:待角度更换完成后键入所记录的坐标,并再次记录其中两点坐标;
[0024]
s10244:利用步骤s10243所记录的两点坐标作为下一个被测五边形的一条边,以延伸出下一个被测多边形;
[0025]
s10245:更换测头角度,并将其确定为50度,再重复步骤s10241-s10244。
[0026]
进一步地,针对步骤s103,还包括以下步骤:
[0027]
s1031:利用图像采集仪器获取pet发射图像上像素点的像素值,且此像素值包括最大像素值;
[0028]
s1032:将大于或等于预设的起始阈值的像素值所对应的pet发射图像上的像素点作为起始轮廓区,且起始阈值为小于或等于最大像素值的像素值;
[0029]
s1033:调整起始阀值,并统计和获取调整后的起始阀值所对应的起始轮廓区上和其内部所包含的像素点个数;
[0030]
s1034:获取均匀断面上对应的pet发射图像对应位置的像素点个数;
[0031]
s1035:计算调整后的起始轮廓区内的像素点数与均匀断面上对应位置像素点之间的差值;
[0032]
s1036:将差值最小值所对应的起始轮廓区作为pet发射图像上构成断面的轮廓区并以此锁定断面的方位。
[0033]
进一步地,针对步骤s104,还包括以下步骤:
[0034]
s1041:在测量时,先确定四点边界的一条边并将其设定为起始边长,同时利用超声波探测技术测定断面到测点的距离;
[0035]
s1042:若需衔接的四边形个数较多,则加长起始边长,并将重新加长后的边长重新作为待测四点边界的边长,再对断层进行测量;
[0036]
s1043:若需衔接的四边形个数较少,则适当缩短起始边长,并再次对断层进行测量;
[0037]
s1044:在测量的过程中更换任意角度,且角度的最大值为180度。
[0038]
进一步地,针对步骤s1043,分割后的四边形边界可以完全衔接,且相邻的四边形
衔接处无间隙,缩短时对四边形的多条边长同步进行缩短。
[0039]
进一步地,针对步骤s1041,在利用超声波探测技术测定断面到测点的距离,具体工作步骤还包括:
[0040]
s10411:在测距开始时,通过控制单元向超声测距模块中的发射端以及接收端发送控制启动指令;
[0041]
s10412:所述发射端与所述接收端在接收到所述控制启动指令时,控制计时器开始进行计时;
[0042]
s10413:所述接收端在接收到所述发射端传输的回波信号后,通过所述控制单元控制所述计时器停止计时,同时,记录所述回波信号到达所述接收端的时间点;
[0043]
s10414:根据所述回波信号到达所述接收端的时间点与所述断面到测点可探测的距离范围,将所述回波信号划分为n个子信号;
[0044]
s10415:获取n个子信号中每个子信号的能量值,同时,根据每个子信号的能量值从n个子信号中选取m个候选子信号;
[0045]
s10416:设定权值函数,并根据所述权值函数获取m个候选子信号中每个候选子信号的选波概率,并将m个候选子信号的选波概率和能量值生成选波参数;
[0046]
s10417:根据m个候选子信号的选波参数确定超声测距模块的测距目标回波信号;
[0047]
s10418:对接收到所述测距目标回波信号进行时间信息数据化处理,并将处理结果发送至控制单元;
[0048]
s10419:所述控制单元接收到所述处理结果后,再次交替向不同超声波测距模块中的发射端和接收端发送启动指令,其中,所述处理结果中包括:所述断面到测点的距离权值;
[0049]
s10420:重复步骤s10412—s10419,交替启动不同超声波测距模块中的一一对应的发射端和接收端进行测距,并获取所述断面到测点的多组距离权值;
[0050]
s10421:通过控制单元将获取的所有所述断面到测点的距离权值进行综合分析计算,获得所述断面到测点的最终距离。
[0051]
进一步地,针对步骤s1023,通过所述标准球的球心位置,同时,获取所述标准球的球心位置的误差系数,并根据误差系数,对所述标准球位置进行重新校正,具体工作过程包括:
[0052]
通过所述x、y、z光栅,获取所述标准球的球心位置,同时,将所述球心位置与所述控制模块中预先设定好的球心位置进行预估;
[0053]
若所述球心位置与所述控制模块中预先设定好的球心位置发生偏差,控制数据计算模块计算所述球心位置与预先设定好的球心位置之间的偏差系数;
[0054][0055]
其中,η表示所述球心位置与预先设定好的球心位置之间的偏差系数,a{x,y,z}表示所述标准球球心的实际坐标点,a{x,y,z}表示预先设定好的所述标准球球心的目标坐标点,v表示所述标准球的体积,r表示所述标准球的半径,α表示所述标准球的球心位置与预先设定好的所述标准球的球心位置连线与水平线之间的夹角,k表示所述标准球的张力参数;
[0056]
基于所述球心位置与预先设定好的球心位置之间的偏差系数,通过数据计算模块,计算所述标准球位置需要校正的校正值;
[0057][0058]
其中,q表示所述标准球位置需要校正的校正值,η表示所述球心位置与预先设定好的球心位置之间的偏差系数,m表示所述标准球的质量,r表示所述标准球的半径,ρ表示所述标准球的密度,ζ表示校正系数,w表示位置校正的校正频率,w表示所述数据计算模块的工作频率,t表示所述数据计算模块的工作时间,v表示所述数据计算模块的工作速度,l表示校正幅值;
[0059]
通过控制模块并基于所述校正值控制校正模块对所述标准球的球心位置进行校正;
[0060]
根据x、y、z光栅,重新获取校正后的所述标准球的球心位置,并继续与预先设定好的球心位置进行预估;
[0061]
若所述球心位置与所述控制模块中预先设定好的球心位置的偏差系数为零,控制校正模块停止工作,完成对所述标准球的球心位置的校正。
[0062]
与现有技术相比,本发明的有益效果是:
[0063]
1.本发明提出的一种断层三维数字化检测方法,利用图像采集仪器获取pet发射图像上像素点的像素值,且此像素值包括最大像素值,将大于或等于预设的起始阈值的像素值所对应的pet发射图像上的像素点作为起始轮廓区,且起始阈值为小于或等于最大像素值的像素值,调整起始阀值,并统计和获取调整后的起始阀值所对应的起始轮廓区上和其内部所包含的像素点个数,再获取均匀断面上对应的pet发射图像对应位置的像素点个数,将计算调整后的起始轮廓区内的像素点数与均匀断面上对应位置像素点之间的差值,最后将差值最小值所对应的起始轮廓区作为pet发射图像上构成断面的轮廓区并以此锁定断面的方位,与传统的断面定位方法相比,此方法能够利用pet技术对不同结构断层进行色度编码,以此对断层进行标记和与预设阀值比对,更加精确地知晓不同断层所在方位以及其结构轮廓,观察断层时也更加直观和清晰。
[0064]
2.本发明提出的一种断层三维数字化检测方法,在测量时,先确定四点边界的一条边并将其设定为起始边长,同时利用超声波探测技术测定断面到测点的距离,若需衔接的四边形个数较多,则加长起始边长,并将重新加长后的边长重新作为待测四点边界的边长,再对断层进行测量,若需衔接的四边形个数较少,则适当缩短起始边长,并再次对断层进行测量,且在测量的过程中可更换任意角度,与一般的键入四点边界方法不同的是其能够先利用超声波探测技术确定所测断面的大致方位,在测量时能够根据所测断面的范围加长或缩短四点边界的边长,并根据不同范围的断面选用不同边长的四点边界将其进行分隔和衔接,以此达到拼接更完全和优化四点检测的目的,也能够对一些微小断层进行检测,解决了传统断层识别技术无法识别微小断层特性的技术问题。
[0065]
3.本发明提出的一种断层三维数字化检测方法,在断层处更换测头角度,并将其初步确定为40度,记录更换角度时的两点坐标,并将断层部分作为一个独立五边形进行测量,待角度更换完成后键入所记录的坐标,并再次记录其中两点坐标,利用所记录的两点坐
标作为下一个被测五边形的一条边,以延伸出下一个被测多边形,更换测头角度,并将其确定为50度,再重复多次,依此类推,测量任务可一次完成,既满足了多边形完全拼接的目的,且测头角度可多次选择,避免断层处的数据不完整或边界部分缺失甚至造成数据出现重叠,在一定程度上也提高了测量精度。
[0066]
4.在测距开始时,通过控制单元向超声测距模块中的发射端以及接收端发送控制启动指令,从而有利于准确控制计时器进行计时,当接收端在接收到发射端传输的回波信号后,准确控制计时器停止计时,从而有效记录回波信号到达接收端的时间点,根据时间点与断面到测点可探测的距离范围,可以将回波信号划分为n个子信号,通过获取n个子信号中每个子信号的能量值,从而准确快速从n个子信号中选取m个候选子信号,通过设定权值函数,精确获取m个候选子信号中每个候选子信号的选波概率,并将m个候选子信号的选波概率和能量值生成选波参数,从而有利于确定超声测距模块的测距目标回波信号,并对目标回波信号进行时间信息数据化处理,同时将处理结果发送至控制单元,之后再次交替向不同超声波测距模块中的发射端和接收端发送启动指令,并重复上述步骤,获取断面到测点的多组距离权值,同时进行综合分析计算,使得获得的断面到测点的最终距离更加准确。
[0067]
5.通过x、y、z光栅准确获取标准球的球心位置,并将球心位置与控制模块中预先设定好的球心位置进行预估,从而有利于快速判定球心位置是否发生偏差,如果发生偏差,通过球心的实际坐标与目标坐标之间的差异计算该球心位置与预先设定好的球心位置之间的偏差系数,并基于球心位置与预先设定好的球心位置之间的偏差系数,通过数据计算模块,精准计算标准球位置需要校正的校正值,通过控制模块并基于校正值控制校正模块对标准球的球心位置进行校正,同时,在校正后重新获取球心位置,从而继续计算偏差系数,当偏差系数为0时,控制校正模块停止工作,从而完成对标准球的球心位置的校正,该过程大大提升了该方法的智能性与高效性。
附图说明
[0068]
图1为本发明断层三维检测方法的总系统流程图;
[0069]
图2为本发明断层三维检测方法的步骤s103的系统流程图;
[0070]
图3为本发明断层三维检测方法的步骤s104的系统流程图;
[0071]
图4为本发明断层三维检测方法的步骤s102的系统流程图;
[0072]
图5为本发明断层三维检测方法的步骤s1024的系统流程图。
具体实施方式
[0073]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0074]
参阅图1和图4,一种断层三维数字化检测方法,包括以下步骤:
[0075]
s101:利用dmis技术建立地震超前观测模型,并采集和处理地震数据;
[0076]
s102:开始利用探测仪器进行断层探测实验;
[0077]
s103:通过pet彩色图像技术向断层表面发射彩色光源,并判断断层位置;
[0078]
s104:利用键入四点边界方法对断层进行自动测量,并加以记录;
[0079]
s105:对测量结果进行数据处理并对结果进行自行比对。
[0080]
针对步骤s102,还包括以下步骤:
[0081]
s1021:探测仪器选用ph10m测头,且测头包括三个电子接触器,前端红宝石探针以及自动旋转测座;
[0082]
s1022:利用探针接触被测物体并使探针偏转一定角度,并至少断开一个接触器;
[0083]
s1023:利用机器读出此时的x、y、z光栅,并记录此时探针所检测到的标准球的球心位置;
[0084]
s1024:从标准球上重取五点进行重新校正,以此消除误差,同时更换探测角度再重复步骤s1022和s1023。
[0085]
针对步骤s1021,ph10m测头采用偏心转动远离,且测量软件显示的坐标数据不是测量灯光栅数据,而是红宝石球中心数据。
[0086]
针对步骤s1024,既可利用重取五点进行校正也可以在测量前将全部使用的角度预先校准完全后再进行测量,无需再重新进行校正。
[0087]
参阅图5,一种断层三维数字化检测方法,针对步骤s1024,还包括以下步骤:
[0088]
s10241:在断层处更换测头角度,并将其初步确定为40度;
[0089]
s10242:记录更换角度时的两点坐标,并将断层部分作为一个独立五边形进行测量;
[0090]
s10243:待角度更换完成后键入所记录的坐标,并再次记录其中两点坐标;
[0091]
s10244:利用步骤s10243所记录的两点坐标作为下一个被测五边形的一条边,以延伸出下一个被测多边形;
[0092]
s10245:更换测头角度,并将其确定为50度,再重复步骤s10241-s10244。
[0093]
依此类推,测量任务可一次完成,既满足了多边形完全拼接的目的,且测头角度可多次选择,避免断层处的数据不完整或边界部分缺失甚至造成数据出现重叠,在一定程度上也提高了测量精度。
[0094]
参阅图2-3,一种断层三维数字化检测方法,针对步骤s103,还包括以
[0095]
下步骤:
[0096]
s1031:利用图像采集仪器获取pet发射图像上像素点的像素值,且此像素值包括最大像素值;
[0097]
s1032:将大于或等于预设的起始阈值的像素值所对应的pet发射图像上的像素点作为起始轮廓区,且起始阈值为小于或等于最大像素值的像素值;
[0098]
s1033:调整起始阀值,并统计和获取调整后的起始阀值所对应的起始轮廓区上和其内部所包含的像素点个数;
[0099]
s1034:获取均匀断面上对应的pet发射图像对应位置的像素点个数;
[0100]
s1035:计算调整后的起始轮廓区内的像素点数与均匀断面上对应位置像素点之间的差值;
[0101]
s1036:将差值最小值所对应的起始轮廓区作为pet发射图像上构成断面的轮廓区并以此锁定断面的方位。
[0102]
与传统的断面定位方法相比,此方法能够利用pet技术对不同结构断层进行色度
编码,以此对断层进行标记和与预设阀值比对,更加精确地知晓不同断层所在方位以及其结构轮廓,观察断层时也更加直观和清晰。
[0103]
针对步骤s104,还包括以下步骤:
[0104]
s1041:在测量时,先确定四点边界的一条边并将其设定为起始边长,同时利用超声波探测技术测定断面到测点的距离;
[0105]
s1042:若需衔接的四边形个数较多,则加长起始边长,并将重新加长后的边长重新作为待测四点边界的边长,再对断层进行测量;
[0106]
s1043:若需衔接的四边形个数较少,则适当缩短起始边长,并再次对断层进行测量;
[0107]
s1044:在测量的过程中更换任意角度,且角度的最大值为180度。
[0108]
与一般的键入四点边界方法不同的是其能够先利用超声波探测技术确定所测断面的大致方位,在测量时能够根据所测断面的范围加长或缩短四点边界的边长,并根据不同范围的断面选用不同边长的四点边界将其进行分隔和衔接,以此达到拼接更完全和优化四点检测的目的,也能够对一些微小断层进行检测,解决了传统断层识别技术无法识别微小断层特性的技术问题。
[0109]
进一步地,针对步骤s1043,分割后的四边形边界可以完全衔接,且相邻的四边形衔接处无间隙,缩短时对四边形的多条边长同步进行缩短。
[0110]
综上所述:本发明提出的一种断层三维数字化检测方法,利用dmis技术建立地震超前观测模型,并采集和处理地震数据,开始利用探测仪器进行断层探测实验,在断层处更换测头角度,并将其初步确定为40度,记录更换角度时的两点坐标,并将断层部分作为一个独立五边形进行测量,待角度更换完成后键入所记录的坐标,并再次记录其中两点坐标,利用所记录的两点坐标作为下一个被测五边形的一条边,以延伸出下一个被测多边形,更换测头角度,并将其确定为50度,再重复多次,依此类推,测量任务可一次完成,既满足了多边形完全拼接的目的,且测头角度可多次选择,避免断层处的数据不完整或边界部分缺失甚至造成数据出现重叠,在一定程度上也提高了测量精度,通过pet彩色图像技术向断层表面发射彩色光源,并判断断层位置,利用图像采集仪器获取pet发射图像上像素点的像素值,且此像素值包括最大像素值,将大于或等于预设的起始阈值的像素值所对应的pet发射图像上的像素点作为起始轮廓区,且起始阈值为小于或等于最大像素值的像素值,调整起始阀值,并统计和获取调整后的起始阀值所对应的起始轮廓区上和其内部所包含的像素点个数,再获取均匀断面上对应的pet发射图像对应位置的像素点个数,将计算调整后的起始轮廓区内的像素点数与均匀断面上对应位置像素点之间的差值,最后将差值最小值所对应的起始轮廓区作为pet发射图像上构成断面的轮廓区并以此锁定断面的方位,与传统的断面定位方法相比,此方法能够利用pet技术对不同结构断层进行色度编码,以此对断层进行标记和与预设阀值比对,更加精确地知晓不同断层所在方位以及其结构轮廓,观察断层时也更加直观和清晰,利用键入四点边界方法对断层进行自动测量,并加以记录,在测量时,先确定四点边界的一条边并将其设定为起始边长,同时利用超声波探测技术测定断面到测点的距离,若需衔接的四边形个数较多,则加长起始边长,并将重新加长后的边长重新作为待测四点边界的边长,再对断层进行测量,若需衔接的四边形个数较少,则适当缩短起始边长,并再次对断层进行测量,且在测量的过程中可更换任意角度,与一般的键入四点边界方
法不同的是其能够先利用超声波探测技术确定所测断面的大致方位,在测量时能够根据所测断面的范围加长或缩短四点边界的边长,并根据不同范围的断面选用不同边长的四点边界将其进行分隔和衔接,以此达到拼接更完全和优化四点检测的目的,也能够对一些微小断层进行检测,解决了传统断层识别技术无法识别微小断层特性的技术问题,对测量结果进行数据处理并对结果进行自行比对。
[0111]
本发明提供了一种断层三维数字化检测方法,针对步骤s1041,在利用超声波探测技术测定断面到测点的距离,具体工作步骤还包括:
[0112]
s10411:在测距开始时,通过控制单元向超声测距模块中的发射端以及接收端发送控制启动指令;
[0113]
s10412:所述发射端与所述接收端在接收到所述控制启动指令时,控制计时器开始进行计时;
[0114]
s10413:所述接收端在接收到所述发射端传输的回波信号后,通过所述控制单元控制所述计时器停止计时,同时,记录所述回波信号到达所述接收端的时间点;
[0115]
s10414:根据所述回波信号到达所述接收端的时间点与所述断面到测点可探测的距离范围,将所述回波信号划分为n个子信号;
[0116]
s10415:获取n个子信号中每个子信号的能量值,同时,根据每个子信号的能量值从n个子信号中选取m个候选子信号;
[0117]
s10416:设定权值函数,并根据所述权值函数获取m个候选子信号中每个候选子信号的选波概率,并将m个候选子信号的选波概率和能量值生成选波参数;
[0118]
s10417:根据m个候选子信号的选波参数确定超声测距模块的测距目标回波信号;
[0119]
s10418:对接收到所述测距目标回波信号进行时间信息数据化处理,并将处理结果发送至控制单元;
[0120]
s10419:所述控制单元接收到所述处理结果后,再次交替向不同超声波测距模块中的发射端和接收端发送启动指令,其中,所述处理结果中包括:所述断面到测点的距离权值;
[0121]
s10420:重复步骤s10412—s10419,交替启动不同超声波测距模块中的一一对应的发射端和接收端进行测距,并获取所述断面到测点的多组距离权值;
[0122]
s10421:通过控制单元将获取的所有所述断面到测点的距离权值进行综合分析计算,获得所述断面到测点的最终距离。
[0123]
该实施例中,发送控制启动指令可以是人工操作发送,也可以是系统自动发送控制启动指令。
[0124]
该实施例中,回波信号可以是当接收端不能完全吸收波的能量时,波的一部分能量会被反射回来,就形成了回波信号。
[0125]
该实施例中,权值函数可以是根据候选子信号的信号能量均值所构成的函数。
[0126]
该实施例中,选波概率可以是与回波信号相匹配的候选子信号的概率。
[0127]
该实施例中,选波参数可以是衡量超声波测量距离的参数。
[0128]
该实施例中,测距目标回波信号,可以根据当超声波测距反射回的能量符合选波参数的标准时的信号。
[0129]
该实施例中,距离权值可以是通过不同超声波模块获取的断面到测点的距离均值
的频数。
[0130]
上述技术方案的工作原理及有益效果是:在测距开始时,通过控制单元向超声测距模块中的发射端以及接收端发送控制启动指令,从而有利于准确控制计时器进行计时,当接收端在接收到发射端传输的回波信号后,准确控制计时器停止计时,从而有效记录回波信号到达接收端的时间点,根据时间点与断面到测点可探测的距离范围,可以将回波信号划分为n个子信号,通过获取n个子信号中每个子信号的能量值,从而准确快速从n个子信号中选取m个候选子信号,通过设定权值函数,精确获取m个候选子信号中每个候选子信号的选波概率,并将m个候选子信号的选波概率和能量值生成选波参数,从而有利于确定超声测距模块的测距目标回波信号,并对目标回波信号进行时间信息数据化处理,同时将处理结果发送至控制单元,之后再次交替向不同超声波测距模块中的发射端和接收端发送启动指令,并重复上述步骤,获取断面到测点的多组距离权值,同时进行综合分析计算,使得获得的断面到测点的最终距离更加准确。
[0131]
本发明提供了一种断层三维数字化检测方法,针对步骤s1023,通过所述标准球的球心位置,同时,获取所述标准球的球心位置的误差系数,并根据误差系数,对所述标准球位置进行重新校正,具体工作过程包括:
[0132]
通过所述x、y、z光栅,获取所述标准球的球心位置,同时,将所述球心位置与所述控制模块中预先设定好的球心位置进行预估;
[0133]
若所述球心位置与所述控制模块中预先设定好的球心位置发生偏差,控制数据计算模块计算所述球心位置与预先设定好的球心位置之间的偏差系数;
[0134][0135]
其中,η表示所述球心位置与预先设定好的球心位置之间的偏差系数,a{x,y,z}表示所述标准球球心的实际坐标点,a{x,y,z}表示预先设定好的所述标准球球心的目标坐标点,v表示所述标准球的体积,r表示所述标准球的半径,α表示所述标准球的球心位置与预先设定好的所述标准球的球心位置连线与水平线之间的夹角,k表示所述标准球的张力参数;
[0136]
基于所述球心位置与预先设定好的球心位置之间的偏差系数,通过数据计算模块,计算所述标准球位置需要校正的校正值;
[0137][0138]
其中,q表示所述标准球位置需要校正的校正值,η表示所述球心位置与预先设定好的球心位置之间的偏差系数,m表示所述标准球的质量,r表示所述标准球的半径,ρ表示所述标准球的密度,ζ表示校正系数,w表示位置校正的校正频率,w表示所述数据计算模块的工作频率,t表示所述数据计算模块的工作时间,v表示所述数据计算模块的工作速度,l表示校正幅值;
[0139]
通过控制模块并基于所述校正值控制校正模块对所述标准球的球心位置进行校正;
[0140]
根据x、y、z光栅,重新获取校正后的所述标准球的球心位置,并继续与预先设定好
的球心位置进行预估;
[0141]
若所述球心位置与所述控制模块中预先设定好的球心位置的偏差系数为零,控制校正模块停止工作,完成对所述标准球的球心位置的校正。
[0142]
上述技术方案的工作原理及有益效果是:通过x、y、z光栅准确获取标准球的球心位置,并将球心位置与控制模块中预先设定好的球心位置进行预估,从而有利于快速判定球心位置是否发生偏差,如果发生偏差,通过球心的实际坐标与目标坐标之间的差异计算该球心位置与预先设定好的球心位置之间的偏差系数,并基于球心位置与预先设定好的球心位置之间的偏差系数,通过数据计算模块,精准计算标准球位置需要校正的校正值,通过控制模块并基于校正值控制校正模块对标准球的球心位置进行校正,同时,在校正后重新获取球心位置,从而继续计算偏差系数,当偏差系数为0时,控制校正模块停止工作,从而完成对标准球的球心位置的校正,该过程大大提升了该方法的智能性与高效性。
[0143]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1