一种多旋翼无人机水样采集系统的制作方法
[0001]
本发明属于环境水质监测技术领域,特别涉及一种多旋翼无人机水样采集系统。
背景技术:
[0002]
传统采集水样的一般方法是依靠人力,借助船只等交通工具到达目标采样点,人为地放下采样瓶至设定水深并采集水样。该采样方法受人工因素影响大,工作效率低且具有一定的危险性。因此,急需一种更加高效、安全的多旋翼无人机水样采集系统。
技术实现要素:
[0003]
本发明的目的在于提供一种多旋翼无人机水样采集系统,以解决人工进行水样采集,工作效率低且具有一定的危险性的问题。
[0004]
为实现以上目标,本发明提供如下技术方案:
[0005]
一种多旋翼无人机水样采集系统,包括多旋翼无人机、水样采集系统及手持移动设备,其中水样采集系统设置于多旋翼无人机上;所述手持移动设备用于与所述多旋翼无人机和所述水样采集系统进行无线通信;
[0006]
所述水样采集系统包括收放控制装置、收放绳索及采样瓶,其中收放控制装置设置于多旋翼无人机上,所述收放绳索的一端与所述收放控制装置连接,另一端与采样瓶连接。
[0007]
所述采样瓶包括瓶体、上出水阀门及下进水阀门,其中瓶体的顶部和底部分别设有上出水口和下进水口,所述上出水口处设有上出水阀门;所述下进水口处设有下进水阀门。
[0008]
所述上出水口大于所述下进水口。
[0009]
所述上出水阀门和所述下进水阀门均为单向压力阀。
[0010]
所述瓶体的底部设有采样瓶底座,所述下进水阀门设置于所述采样瓶底座上;所述采样瓶底座上设有位于所述下进水阀门外侧的配重环。
[0011]
所述瓶体的两侧设有采样瓶提柄。
[0012]
所述收放控制装置包括电机和绕线轮,所述电机设置于所述多旋翼无人机的机身上,并且输出轴与绕线轮连接;所述收放绳索的一端固定在所述绕线轮上;所述电机通过所述手持移动设备控制,所述电机可驱动所述绕线轮转动,从而实现所述收放绳索的缠绕或释放。
[0013]
所述水样采集系统设置于所述多旋翼无人机底部的机身底座上。
[0014]
本发明的优点及有益效果是:本发明装置简单,易组成,操作方便,可实现对不同深度的水质进行精确采样,并且采样瓶采用下进水阀门进水,上出水阀门出水设计,可以有效确保在采样回收过程中,采样瓶中水不外流。
附图说明
[0015]
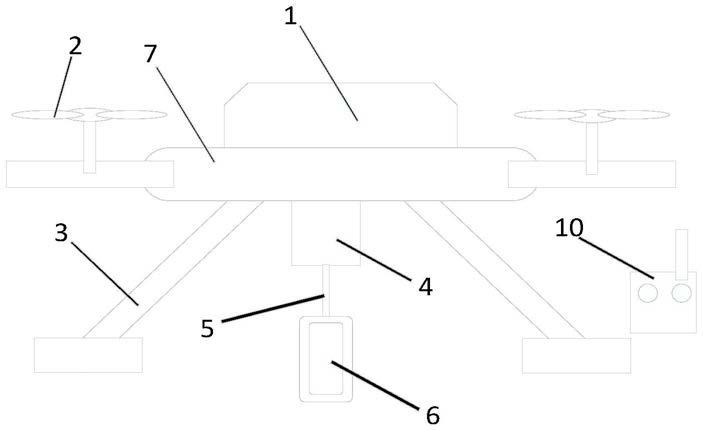
图1是本发明多旋翼无人机水样采集系统的结构示意图;
[0016]
图2是本发明中采样瓶的俯视图;
[0017]
图3是本发明中采样瓶的仰视图;
[0018]
图4是本发明中采样瓶的立体图;
[0019]
图5是本发明中采样瓶的截面图。
[0020]
图中:1为机身,2为旋翼,3为起落架,4为收放控制装置,5为收放绳索,6为采样瓶,7为机身底座,8为采样瓶提柄,9为上出水阀门,10为手持移动设备,11为下进水阀门,12为采样瓶底座。
具体实施方式
[0021]
为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
[0022]
如图1所示,本发明提供的一种多旋翼无人机水样采集系统,包括多旋翼无人机、水样采集系统及手持移动设备10,其中水样采集系统设置于多旋翼无人机上;手持移动设备10用于与多旋翼无人机和水样采集系统进行无线通信;水样采集系统包括收放控制装置4、收放绳索5及采样瓶6,其中收放控制装置4设置于多旋翼无人机上,收放绳索5的一端与收放控制装置4连接,另一端与采样瓶6连接。
[0023]
本发明的实施例中,多旋翼无人机包括机身1、旋翼2和起落架3,在机身1的底部设有机身底座7,机身底座7上设有水样采集系统。
[0024]
如图2-3所示,本发明的实施例中,采样瓶6包括瓶体、上出水阀门9及下进水阀门11,其中瓶体的顶部和底部分别设有上出水口和下进水口,上出水口处设有上出水阀门9;下进水口处设有下进水阀门11。
[0025]
如图4-5所示,本发明的实施例中,上出水阀门9和下进水阀门11均为单向压力阀。具体地,采样瓶6下潜时,下进水阀门11为圆形,随着水流向内打开,水流进入采样瓶6中。上出水阀门9呈扇形,上出水阀门9随着水流向外打开,使采样瓶6中的水流出。
[0026]
进一步地,上出水口大于下进水口,下进水口小,处于深处压强大。上出水口大,相比下进水口处于高处压强小,两处水压差距再加上配重环重力作用保证采样瓶未到目标水深时,瓶内水是自下向上流动的,并且上出水口大方便取出水样。
[0027]
进一步地,如图3所示,瓶体的底部设有采样瓶底座12,下进水阀门11设置于采样瓶底座12上;采样瓶底座12上设有位于下进水阀门11外侧的配重环。
[0028]
进一步地,如图2所示,瓶体的两侧设有采样瓶提柄8,瓶体内部设有温度计。
[0029]
本发明的实施例中,收放控制装置4包括电机和绕线轮,电机设置于机身1底部的机身底座7上,并且输出轴与绕线轮连接;收放绳索5的一端固定在绕线轮上,收放绳索5的末端连接不同规格的采样瓶6;手持移动设备10可控制电机正传或反转,电机带动绕线轮转动,从而实现收放绳索5的缠绕或释放。
[0030]
本发明的工作过程如下:
[0031]
当多旋翼无人机飞至目标水域上空时,保持一定的悬停状态。使用手持移动设备10远程操控,使收放控制装置4中的电机正传释放采样瓶6,使采样瓶6浸入水中,直至上出
水阀门9完全莫入水中,使释放采样瓶6到达目标水深后,操控手持移动设备10,远程指挥收放控制装置4中的电机反转,回收采样瓶6。采样完成后,多旋翼无人机返回。
[0032]
本发明提供的一种多旋翼无人机水样采集系统,采样瓶6采用下进水阀门11进水,上出水阀门9出水设计,下进水阀门11和上出水阀门9通过采样瓶6下潜时水产生的流速打开,且只能向上开;下进水阀门11和上出水阀门9依靠采样瓶6上升时瓶内外水压关闭。在采样瓶6未到达目标水深时,水流从下进水阀门11流入采样瓶6内,再由上出水阀门9流出;在采样瓶6到达目标水深以及后续再上升回收时,通过采样瓶6内水压将下进水阀门11锁死,通过采样瓶6外侧水压将上出水阀门9锁死,确保准确采集到目标水深水质;采样瓶6的规格有500ml、1l、2l。
[0033]
本发明提供的一种多旋翼无人机水样采集系统,具有高效率,易操作等优点,可以实现对不同深度的水样进行准确采集,提高目标水样采集准确度。
[0034]
以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1