THMC耦合煤岩体三轴流变试验多参数测量装置及方法与流程
thmc耦合煤岩体三轴流变试验多参数测量装置及方法
技术领域
[0001]
本发明属于岩石力学与工程技术领域,具体为一种thmc耦合作用下煤岩体三轴流变试验及多参数测量装置及方法。
背景技术:
[0002]
随着残煤复采技术的逐步推广和应用,上世纪采用旧式开采体系遗留的煤炭资源逐步被开采利用,该部分煤炭资源大都以煤柱的形式赋存,称为残采煤柱。残采煤柱长期处在采空水、地压、地温等的复杂环境中,呈现明显的流变特性,残采煤柱出现不同程度的变形和损伤破坏,在复采巷道掘进动压及工作面回采动压的扰动下,残采煤柱的变形及损伤破坏明显增加,其力学特性及稳定性发生明显的变化。研究残采煤柱在thmc耦合作用下的力学特征及稳定性对研究复采采场顶板稳定及煤柱失稳机理有极为重要的作用。
[0003]
众所周知,煤岩体流变试验的主要特点是试验持续时间长,因而对试验装置的加载及测量系统稳定性要求高,且流变实验对环境尤其是温度极其敏感,必须保证试验过程中温度的恒定。研究煤岩体在三轴状态下的流变特性,最重要的是获取煤岩体在不同加载条件下的轴向及径向变形,进而建立流变的本构模型。
[0004]
目前国内大多数煤岩体三轴流变试验机均采用油为围压介质,而关于以水为围压介质的三轴流变试验机的研究较少,其主要技术难题就是解决在水环境中煤岩体变形的测量,现有的大多数位移传感器无法保证孔隙水压作用下位移引伸计及应变片的稳定性。研究在以水为围压介质的条件下测量煤岩体的径向变形方法及装置是研究残采煤柱在采空水、地压、地温、采动压力等多场耦合作用下的三轴流变特性的关键。
[0005]
目前国内关于煤岩体三轴流变试验装置的中国发明专利主要有:中国矿业大学发明的“一种多功能高温高压三轴煤岩试验装置及方法”(cn103884604b);太原理工大学发明的“一种高温下单轴压缩岩石径向变形测量方法”(cn109946171a);中国科学院武汉岩土力学研究所发明的“一种并联型岩石温度-渗流-应力耦合三轴流变仪”(cn105510144b);中国矿业大学(北京)发明的“动力扰动低温岩石三轴加卸载流变仪及试验方法”(cn107036903b)。已有的相关发明专利的主要有以下特点:现有的煤岩体三轴压缩试验机施加围压的介质一般为油,煤岩体受压过程中的轴向及径向变形一般采用引伸计和应变片进行测量;三轴流变实验一般采用机械加载或微机伺服控制加载;煤岩体在动载作用下的力学特性及力学响应一般对煤岩体进行shpb动态冲击试验,一般用应变率的大小来评判动态冲击试验过程中动载的大小。
[0006]
在水环境中进行煤岩体的三轴流变试验时,现有的试验装置及技术存在以下缺陷:受水的导电性的影响,煤岩样的径向变形测量困难,现有的径向位移传感器无法在水中进行测量;应变片需要进行防水处理,且受水压的影响,应变片本身产生较大的应变对测量结果产生较大的影响;轴向加载不能实现不同应变率的精准控制,无法在试验过程实现对试件的动态加载,且不能确保长时间的稳压效果。因此,需要研制新的实验装置实现thmc耦合作用下的煤岩体的三轴流变试验,且能在水环境中测量试样的径向变形。
技术实现要素:
[0007]
本发明克服了现有技术的不足,提出一种thmc耦合作用下煤岩体三轴流变试验及多参数测量装置及方法。
[0008]
为了达到上述目的,本发明是通过如下技术方案实现的。
[0009]
thmc耦合煤岩体三轴流变试验多参数测量装置,包括轴向伺服加载系统、三轴压力室及主测试系统、围压跟踪系统、温度控制系统、数据采集与控制系统;其特征在于,所述三轴压力室及主测试系统的三轴压力室外部设置有水浴槽,所述温度控制系统与水浴槽相连接;三轴压力室通过管路与围压跟踪泵相连接,通过围压跟踪泵对三轴压力室内的试件施加孔隙水压;所述三轴压力室的水平轴向均匀布置n个径向位移传感器,n为偶数,通过径向位移传感器测量试件水平轴向相应测点的径向变形;所述三轴压力室的底部设置有通道,所述通道用于监测试件的损伤变形;所述轴向伺服加载系统为电液伺服加载控制。
[0010]
优选的,所述径向位移传感器的传感器探头长度可调节。
[0011]
优选的,所述三轴压力室为圆柱型结构,三轴压力室的中部圆周均匀布置n个径向位移传感器。
[0012]
更进一步,三轴压力室的中部圆周均匀布置8个径向位移传感器。
[0013]
进一步的,所述通道内设置有声发射监测装置或应变片。
[0014]
进一步的,所述轴向伺服加载系统由加载油缸、伺服油源系统、轴向力传感器、电液伺服阀、控制器组成,控制器接收轴向力传感器的反馈信号后控制轴向加载速率与幅度。
[0015]
采用所述测量装置的thmc耦合煤岩体三轴流变试验多参数测量方法,包括以下步骤:
[0016]
1)安装试样并装配三轴压力室,采用恒位移目标力加载方式进行预加载,使试件与轴向伺服加载系统完全接触。
[0017]
2)三轴压力室内充满水并通过围压跟踪泵对试件施加孔隙水压,使三轴压力室内围压和温度恒定;三轴压力室的中部圆周均匀布置8个径向位移传感器,通过试件的直径d的变化计算得出试件的径向应变ε
d
;具体为通过径向位移传感器获得8个径向变形:δd1~δd8;8个径向变形数据两两对应,共计4对径向变形数据δd1+δd5、δd2+δd6、δd3+δd7、δd4+δd8;计算试件的径向应变ε
d
=(δd1+δd2+
…
+δd8)/4d;
[0018]
3)通过数据采集与控制系统设置加载参数,并通过设置多个位移加载速率实现轴向多等级静态或动态加载。
[0019]
优选的,三轴压力室内围压的压力范围0~20mpa。
[0020]
优选的,通过轴向伺服加载系统内的轴向力传感器的读数ε
l
和试件高度l计算试件的轴向应变ε
l
=δl/l;通过应变率和试件高度计算试验所需的轴向加载速率,其中试件高度l、轴向应变率ε、轴向加载速率v之间的关系为:v=ε
×
l。
[0021]
优选的,所述温度控制系统对三轴压力室进行恒温控制,温度控制范围5~80℃。
[0022]
本发明相对于现有技术所产生的有益效果为:
[0023]
1、本发明装置的轴向加载系统采用电液伺服加载控制,可实现轴向加载的恒压控制,实现加载过程恒试验力、恒位移控制,轴向位移加载速率可在0~3mm/s范围内调节,实现轴向动态加载,轴向加载稳压精度高,稳压误差小于0.05kn。
[0024]
2、本发明装置及方法的三轴压力室内施加围压的介质为水,结合围压跟踪泵对煤
岩体施加孔隙水压,试件的径向变形采用高精度防水lvdt位移传感器进行测量,通过测量试件中部圆周8个表面点沿直径方向的扩张量,间接测量试件的径向应变。
[0025]
3、本发明装置及方法的围压跟踪系统配合温度控制系统实现三轴压力室内的围压(孔隙水压)和温度保持恒定,温度控制和围压介质均为水,三轴压力室内的温度受外界温度变化影响小且能保持恒定。
附图说明
[0026]
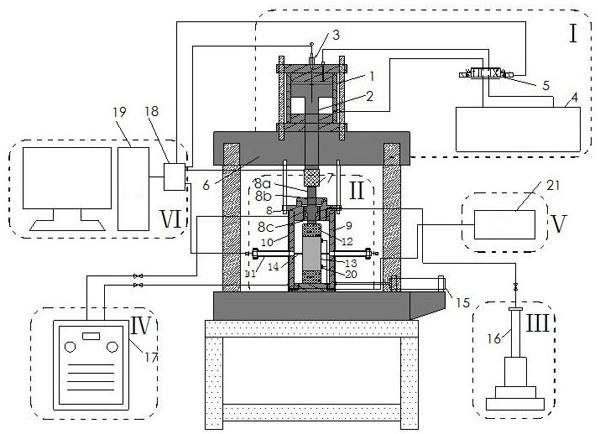
附图1是本发明涉及的试验装置的整体结构及各系统连接示意图。
[0027]
附图2是本发明径向位移传感器布置的剖面图。
[0028]
附图3是本发明三轴压力室内部结构图。
[0029]
附图4是实施例所述自平衡压力室结构示意图。
[0030]
附图5是试件径向应变的计算示意图。
[0031]
附图6是本发明的试验装置及方法进行煤样三轴流变试验的“应变-时间”曲线。
[0032]
图中的标号:
[0033]ⅰ为轴向伺服加载系统;ⅱ为三轴压力室及主测试系统;ⅲ为围压跟踪系统;ⅳ为温度控制系统;
ⅴ
为声发射监测系统;
ⅵ
为数据采集与控制系统。
[0034]
1为加载油缸;2为轴向加载活塞;3为轴向位移传感器;4为伺服油源系统;5为电液伺服阀;6为压机;7为轴向力传感器;8为釜体上堵头;8a为轴向平衡活塞;8b为釜体上堵头压盖;8c为轴压平衡通道;9为三轴压力室;10为高低温水浴槽;11为径向位移传感器;12为岩芯上堵头;13为试件;14为可伸缩探头;15为推拉油缸;16为围压跟踪泵;17为恒温水浴槽加热、制冷系统;18为控制器;19为控制电脑;20为声发射传感器;21为声发射监测仪。
具体实施方式
[0035]
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,结合实施例和附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。下面结合实施例及附图详细说明本发明的技术方案,但保护范围不被此限制。
[0036]
实施例1
[0037]
如图1所示,是一种thmc耦合作用下煤岩体三轴流变试验多参数测量装置,由轴向伺服加载系统ⅰ、三轴压力室及主测试系统ⅱ、围压跟踪系统ⅲ、温度控制系统ⅳ、声发射检测系统
ⅴ
、数据采集与控制系统
ⅵ
构成,轴向伺服加载系统ⅰ采用伺服加载控制,围压跟踪系统ⅲ采用高精度围压跟踪泵16控制,可控制三轴压力室9内的围压并保持恒定。温度控制系统ⅳ采用恒温水浴槽及加热、制冷系统17控制,径向变形测量系统采用八个均匀分布的径向位移传感器11进行测量,试样损伤破坏通过声发射监测系统
ⅴ
的声发射监测仪21监测。声发射检测系统
ⅴ
采用紧贴于试件13表面的声发射探头通过压力室底部的通道监测,声发射探头采用防水耐压结构,可在0~5mpa水压环境下正常工作。
[0038]
轴向伺服加载系统ⅰ由加载油缸1、伺服油源系统4、轴向力传感器7、电液伺服阀5、控制器18组成,控制器18接收各传感器的反馈信号后控制轴向加载速率与幅度,可采用恒位移、恒力、恒位移目标力等多种加载方式实现动静组合加载。轴向加载系统ⅰ是布置于压
机6上方的加载油缸1及其伺服油源系统4,加载油缸1的顶部设置有一轴向位移传感器3,轴向位移传感器3接入控制器18;加载油缸1连接轴向力传感器7和电液伺服阀5,电液伺服阀5连接伺服油源系统4和控制器18,控制器18接受各传感器的反馈信号后控制轴向加载速率与幅度,采用恒位移、恒力、恒位移目标力等多种加载方式实现动静组合加载。
[0039]
如图3和4,三轴压力室9采用自平衡结构,自平衡压力室布置于压力室的上堵头内,平衡三轴压力室内的围压对轴压的影响。自平衡压力室由釜体上堵头8、轴向平衡活塞8a、釜体上堵头压盖8b、轴压平衡通道8c组成;釜体上堵头8封堵在三轴压力室9顶部开口处,轴压平衡通道8c设置在釜体上堵头8内,轴向平衡活塞8a设置在轴压平衡通道8c内并深入三轴压力室9内,可平衡围压对轴压的影响;轴向平衡活塞8a一端连接轴向力传感器7,另一端与岩芯上堵头12接触,两端均采用球形接触,消除因断面不平整导致的水平力;三轴压力室9放置于压机6底座的导轨内,可通过推拉油缸15前后推拉三轴压力室9,便于安装和拆卸试样。
[0040]
如图2和图3所示,三轴压力室9,沿其中部的圆周均匀布置8个径向位移传感器11,传感器探头14可调整长度用于适应不同尺寸的试件,均采用防水结构。相邻两个径向位移传感器11之间夹角为45
°
,径向位移传感器11外壳焊接固定于三轴压力室9的外壁,内部可伸缩的传感器探头14与试件13表面接触,传感器探头14可通过螺纹或更换探针控制其长度,用于测量不同直径试件13的径向变形。试验过程中试件的轴向变形通过加载油缸1内的位移传感器3进行测量、径向变形通过均匀分布的8个径向位移传感器11进行测量,结合试件13的直径、高度等参数计算试验过程中的轴向及径向应变。径向位移传感器11测量范围0~20mm,测量精度<
±
0.1%fs,测量分辨率0.001mm。
[0041]
三轴压力室9的外部布置有高低温恒温水浴槽10,与三轴压力室9连为一体,用于保持三轴压力室内的温度恒定。三轴压力室9内部设置有温度传感器,接入温度控制系统ⅳ;温度控制系统ⅳ接收温度传感器的温度反馈并控制温度。
[0042]
三轴压力室9底部预留有4个可选通道,可采用声发射监测试验过程中试件的损伤破坏情况,也可配合使用应变片对试件不同位置的变形情况进行测量。
[0043]
声发射检测系统
ⅴ
设置有一声发射监测仪21和4个声发射传感器20,声发射传感器20布置于试件表面,经过声发射检测通道连接声发射监测仪21。声发射传感器20布置于三轴压力室9内,紧贴试件13表面布置,用于监测试件13在试验过程中的损伤破坏,通过三轴压力室9底部的专用通道连接声发射监测仪21,其中声发射传感器20特殊处理,可在0~5mpa水压环境下正常工作。其中,轴向伺服加载系统ⅰ恒位移加载速率为0~3mm/s,恒力加载速率为0~20kn/s,轴向位移传感器3量程为0~150mm,测量精度<
±
0.1%fs,测量分辨率0.001mm。加载油缸1的加载幅度为0~150mm,所对应的轴向位移传感器3的量程为0~150mm,测量精度<
±
0.1%fs,测量分辨率0.001mm;伺服油源系统4配合高精度伺服阀5和控制器18可实现轴向高精度加载控制,实现不同加载速率的轴向加载;通过调整轴向位移加载速率,实现不同等级及幅度的动载,其中试件高度(l)、轴向应变率(ε)、轴向加载速率(v)之间的关系为:v=ε
×
l,由此可根据应变率和试件高度计算试验所需的轴向加载速率。
[0044]
数据采集与控制系统
ⅵ
,采用现有的控制程序,具体设置有一控制柜、控制电脑19和控制器18,控制器18接收轴向位移传感器3、径向位移传感器11及轴向力传感器7、温度及围压等数据,同时采集试验过程中的轴向及径向变形、轴向力、围压、温度等数据,并能接收
轴向力、轴向位移的反馈,实现轴向的恒力、恒位移、恒位移目标力及轴向力保持等多种加载方式,实现不同方式、不同速率、不同等级的轴向力加载。
[0045]
三轴压力室9腔体尺寸为ф200
×
400mm,可以通过更换岩芯上下堵头12进行ф100
×
200mm,ф50
×
100mm,ф25
×
50mm三种尺寸试样的加载试验;釜体上堵头设置有自平衡腔体,轴向平衡活塞8a的行程0~40mm。
[0046]
高精度围压跟踪泵16,其压力范围0~20mpa,精度<
±
0.05mpa,测量分辨率0.001mpa。
[0047]
温度控制系统ⅳ采用高低温恒温浴槽、循环泵等组合系统来实现三轴压力室的恒温控制,具有制冷、加热、水循环以及温度自恒定功能,温度控制范围5~80℃,控温精度≤
±
0.2℃。
[0048]
试验过程中试件的轴向变形通过加载油缸1内的位移传感器3进行测量、径向变形通过均匀分布的8个径向位移传感器11进行测量,结合试件13的直径、高度等参数计算试验过程中的轴向及径向应变。
[0049]
如图5和6所示,径向lvdt采用防水结构,分别测量试件中部圆周的8个点的径向变形,通过对数据的整理、分析,结合试件的直径(d)计算得出试件的径向应变(ε
d
)。其中8个径向变形(δd1~δd8)数据两两对应,共计4对径向变形数据(δd1+δd5、δd2+δd6、δd3+δd7、δd4+δd8),由此可以计算试件的径向应变ε
d
=(δd1+δd2+
…
+δd8)/4d。由于试验数据的误差及离散,实际计算时,可根据实际情况对数据进行取舍,选用n(1~4)对径向变形数据计算试件的径向应变(ε
d
)。
[0050]
所述轴向变形测量系统由布置于加载油缸内的位移传感器组成,测量范围0~150mm,测量精度<
±
0.1%fs,测量分辨率0.001mm,通过加载油缸内的位移传感器的读数(ε
l
)和试件高度(l)计算试件的轴向应变ε
l
=δl/l。
[0051]
实施例2
[0052]
下面通过实例,并参照附图,对thmc耦合作用下煤岩体三轴流变试验多参数测量方法进行详细介绍。
[0053]
此处以标准试样ф50
×
100mm的圆柱煤样为例,采用附图1中的试验装置来研究煤样在thmc耦合作用及动静组合加载条件下的流变特性。结合附图,其具体的实施步骤如下:
[0054]
步骤一,取样:在大块的煤样上沿垂直煤层层理方向钻取ф50
×
100mm的圆柱煤样,试样尺寸误差不得大于1.0mm;并对煤样上下端面进行打磨,保证其端面平行,平整度误差不得高于0.01mm。
[0055]
步骤二,连接试验装置各系统并调试:依次连接温度控制系统ⅳ、围压跟踪系统ⅲ、轴向伺服加载系统ⅰ、声发射监测系统
ⅴ
;打开数据采集及控制系统
ⅵ
,确保轴向力传感器、轴向及径向位移传感器、声发射、温度及围压等测量通道畅通。
[0056]
步骤三,安装试样并装配三轴压力室9:控制压机提升釜体上堵头8脱离三轴压力室9后,向前推三轴压力室9,拆卸径向位移传感器后在釜体下堵头中央依次放置岩芯下堵头、试样、岩芯上堵头,同时将声发射探头布置于试件13表面,安装径向位移传感器并调节探针长度使其接触试样圆周,向后拉三轴压力室9至原位后控制压机下降釜体上堵头8,之后采用恒位移目标力加载方式进行预加载,确保试样13与压力机完全完全接触,预加载速率0.005~0.01mm/s,目标力0.3~0.7kn,试件安装完成。
[0057]
步骤四,三轴压力室9充液并保持围压、温度稳定:打开三轴压力室的进液阀门,依次打开恒温水浴槽的进出液阀门、加热及制冷开关、水循环开关,设置围压(2mpa)及温度(30℃),开启环压跟踪泵相应的阀门及温控开关,使三轴压力室9内充满液体,三轴压力室9内围压加至试验所需值并保持,其中围压及温度稳定时间不小于2h。
[0058]
步骤五,设置试验方案及采集参数:在控制电脑上分别设置不同加载阶段的轴向加载方式、加载速率、目标值及保持时间等参数;设置轴向力、轴向及径向变形数据的采集频率并将数值归零,准备进行加载试验。
[0059]
步骤七,开始加载试验—静态分级加载蠕变试验:设置三个不同的试验力等级(3kn、5kn、8kn、12kn),在每个加载等级内以0.05kn/s的加载速率进行加载至目标力,待试验力达到设置值且试件轴向及径向变形保持恒定后(≥24h),方可进行下一级的加载试验,依次循环直至完成所有加载等级。
[0060]
步骤八,开始加载试验—分级动态加载试验:根据试验方案要求的应变率和试件高度,计算试验所需的位移加载速率,采用位移加载方式进行加载至目标试验力,为一个加载循环;然后循环进行动态加载,直至试件破坏。
[0061]
步骤七和步骤八执行过程中,可选择相应的加载等级阶段进行孔隙水压的突变,即试件的轴向及径向变形稳定之后,突然卸去围压,研究孔隙水压对煤样三轴蠕变变形特征的影响,进而分析建立相应条件下煤体的蠕变本构模型。
[0062]
步骤九,记录保存试验数据:在试件加载的全过程,记录并保存试件加载全过程的轴向力数值、轴向变形、径向变形、声发射信号等测量数据以及围压、温度等试验特征参数。
[0063]
步骤十,拆卸试件:通过各控制系统依次卸除轴向力、围压、声发射、温度等,排除三轴压力室内的水后,起吊釜体上堵头,使用侧向推油缸将三轴压力室推出,拆卸径向位移传感器,取出破碎的试件并拆卸声发射探头,清理压力室内试验空间。
[0064]
步骤十一,分析试验数据:处理实验数据,绘制轴向力(应力)、轴向变形(应变)、径向变形(应变)随时间的变化曲线,分析不同加载阶段的试件的应力-应变(轴向、径向)曲线、不同加载阶段轴向应变及径向应变随时间的变化曲线、不同加载阶段试件的声发射特征等。
[0065]
对于不同尺寸的试件,可以通过更换岩芯上下堵头、调整径向位移传感器探头的长度来适应实验需求;试验所需围压和温度根据实验方案确定,围压范围0~20mpa,温度范围5~80℃;试验轴向加载速率可根据试验所需的应变率及试件尺寸进行确定,通过控制不同的位移加载速率进而对试件施加不同的动态载荷,以达到动静组合加载的目的。其余操作步骤与上述试验步骤相同。
[0066]
以上内容是结合具体的优选实施方式对本发明所做的进一步详细说明,不能认定本发明的具体实施方式仅限于此,对于本发明所属技术领域的普通技术人员来说,在不脱离本发明的前提下,还可以做出若干简单的推演或替换,都应当视为属于本发明由所提交的权利要求书确定专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1