河道箱涵水质实时监测系统及方法与流程
1.本发明涉及测量技术领域,具体地,涉及一种河道箱涵水质实时监测系统及方法。
背景技术:
2.水中的氨氮可以在一定条件下转化成亚硝酸盐,如果长期饮用,水中的亚硝酸盐将和蛋白质结合形成亚硝胺,这是一种强致癌物质,对人体健康极为不利。氨氮对水生物起危害作用的主要是游离氨,其毒性比铵盐大几十倍,并随碱性的增强而增大。氨氮毒性与池水的ph值及水温有密切关系,一般情况,ph值及水温愈高,毒性愈强,对鱼的危害类似于亚硝酸盐。因此,对水资源进行氨氮检测是非常重要的。
3.专利文献cn111504998a公开了一种氨氮在线监测仪,传统的氨氮检测方法为取水样后放入氨氮检测仪器中,进行水样氨氮含量分析,此方法工作效率低,在人工无法到达取水样的地方,如箱涵等地方则无法进行检测,且成本较大。
技术实现要素:
4.针对现有技术中的缺陷,本发明的目的是提供一种河道箱涵水质实时监测系统及方法。
5.根据本发明提供的一种河道箱涵水质实时监测系统,包括:水下机器人和氨氮传感器;
6.所述氨氮传感器安装在所述水下机器人上,所述氨氮传感器的信号线与所述水下机器人的控制系统电连接,所述水下机器人通过线缆与水面控制台电连接,所述水面控制台对所述氨氮传感器和所述水下机器人检测到的数据进行处理和显示。
7.优选地,所述氨氮传感器安装在所述水下机器人的下方。
8.优选地,所述线缆包括脐带缆。
9.优选地,所述线缆设置于缆盘上。
10.优选地,所述信号线经过防水处理。
11.根据本发明提供的一种河道箱涵水质实时监测方法,采用上述的河道箱涵水质实时监测系统,控制所述水下机器人运动至监测点,所述水下机器人运动至所述监测点后保持一定时间,等待回传数据稳定后结束该监测点的监测,水面控制台对所述氨氮传感器和所述水下机器人检测到的数据进行处理和显示。
12.优选地,在监测前还包括对监测环境进行确认,在监测环境满足作业条件时再进行监测。
13.优选地,在监测前还包括对所述水下机器人进行水面检测。
14.优选地,所述监测点的数量为一个或多个。
15.优选地,对监测结束后的所述水下机器人进行回收和清洗保养。
16.与现有技术相比,本发明具有如下的有益效果:
17.(1)通过rov搭载氨氮传感器的方法,解决了人为取样无法到达导致无法得到水质
氨氮含量数据的问题,取得了全方位监测的效果。
18.(2)通过氨氮传感器与rov集成,回传数据同时显示至水面控制台的方法,解决了氨氮传感器数据与rov数据无法同屏显示的问题。
附图说明
19.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
20.图1为本发明的系统总体连接图;
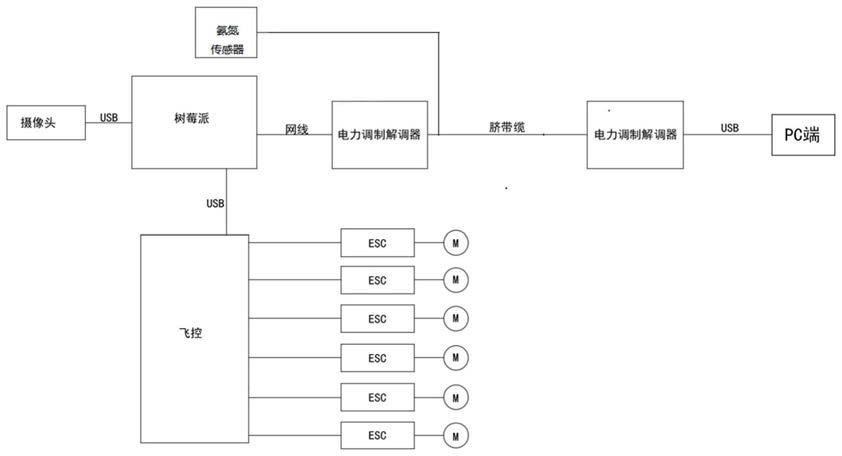
21.图2为本发明的电路结构图;
22.图3为本发明的监测流程图。
具体实施方式
23.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
24.如图1所示,本发明提供的一种河道箱涵水质实时监测系统,包括:水下机器人(rov)、氨氮传感器和摄像头(摄像头通常为水下机器人内部已集成的结构)。
25.氨氮传感器和摄像头安装在水下机器人上,两者的信号线需要足够长,并通过防水处理后与水下机器人的控制系统电连接。水下机器人通过线缆与水面控制台电连接,水面控制台对氨氮传感器和水下机器人检测到的数据进行处理和显示。
26.在本实施例中,氨氮传感器安装在水下机器人的下方,所采用的线缆包括脐带缆,所述其带来设置于缆盘上。如图2所示,水下机器人主要包括控制器(树莓派)、飞控和摄像头。氨氮传感器的信号线接入水下机器人的控制系统,通过脐带缆将数据传输至水面控制台,脐带缆在末端经过转换为usb后连接至所述水面控制台。
27.如图3所示,根据本实施例提供的一种河道箱涵水质实时监测方法,采用上述的河道箱涵水质实时监测系统。
28.执行包括:
29.1)在监测前还包括对监测环境进行确认,在监测环境满足作业条件时再进行监测。
30.在监测前还包括对水下机器人进行水面检测。
31.2)在河道箱涵周围确定布放点。布防点需满足如下条件:1.管涵水流流速小于水下机器人最大抗流能力;2.布防点位置不存在尖锐角或其他可能损坏水下机器人的尖锐表面。
32.3)控制水下机器人运动至监测点,通过水下机器人本体携带的摄像头进行观察,确认是否到达预设监测点,监测点的数量为一个或多个。
33.4)水下机器人运动至监测点后保持一定时间,等待回传数据稳定后结束该监测点的监测,数据稳定的判断依据为所采集并回传的数据波动不大于10%。
34.5)水面控制台对氨氮传感器和水下机器人检测到的数据进行处理和显示、记录。
35.数据处理包括:1.去除采集中产生的离散值2.通过移动窗口平均的方法进行后数据处理3.通过数据可视化进行显示。
36.6)对监测结束后的水下机器人进行回收和清洗保养。
37.在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
38.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1