基于相位模态理论的高阶声场传感器阵列的方位估计方法与流程
1.本发明属于信号处理、水声测量领域,具体涉及一种基于相位模态理论的高阶声场传感器阵列,利用相位模态分解(phase mode decomposition,pmd)提取每个高阶声场传感器的相位模态信号并构建信号模型,用相应方法完成的目标方位估计(direction of arrival,doa)。
背景技术:
2.声呐系统通过传感器阵列接收水下声场信息,然后利用信号处理算法实现潜艇等水下目标的探测和相关参数的估计。随着科技的进步,潜艇的隐蔽性越来越好,如何最大限度地提高我国新型声呐对安静型潜艇等水下目标的探测能力,已经成为一项十分迫切的任务。传统声呐的尺寸和性能之间的矛盾越来越突出,如何在低信噪比条件下实现对目标有效的估计和识别是现在需要解决的一个重要的问题。想要基于主流的声压传感器单从处理算法优化上获得较大的突破比较困难,而高阶声场传感器可以同步获取空间内同一位置的高阶声场信息,为解决这类问题提供了一种新的思路。
3.目前能够获取到的声场高阶信息主要有两种,一种是利用矢量传感器直接测量得到的声压、振速和振速梯度(王笑.高阶矢量水听器阵列信号处理[d].哈尔滨工程大学硕士学位论文.2018),另一种是利用声压圆环阵或球面阵通过模态分解得到的多阶模态(teutsch h.modal array signal processing:principles and applications of acoustic wavefield decomposition[m].berlin heidelberg:springer
‑
verlag.2007)。对于矢量水听器,已有的技术最高能实现二阶信息即振速梯度的获取,且二阶传感器技术仍未成熟,而圆环阵多阶模态的最高阶数虽受限于采样定理,但在一定条件下可以通过阵元数的调整获得比矢量水听器更多的高阶信息,且有更容易实现的物理结构。在矢量阵的信号处理中,有长矢量及张量信号模型及相应的doa估计算法(forster p.,ginolhac g.and boizard m."derivation of the theoretical performance of a tensor music algorithm."signal processing 129(12):97
‑
105.2016.),除了均匀直线阵(uniform line array,ula),矢量嵌套阵属于稀疏阵的一种,可以用较少的阵元通过特定的排布方式实现阵列孔径的扩展,从而提高方位分辨性能(han k.and nehorai a."nested vector
‑
sensor array processing via tensor modeling."ieee transactions on signal processing 62(10):2542
‑
2553.2014.)。
[0004]
目前针对相位模态分解展开的研究多局限于单个圆环阵,且研究重点多在于指向性性能,几乎没有将其看作一个阵元组成阵列进行处理的研究,这未能充分发挥多阶模态的优势。本发明将建立以圆环阵列为阵元结构的高阶声场传感器阵列的信号模型,并借鉴矢量阵相关算法对适用于高阶声场传感器阵列的doa估计方法进行研究,以充分发挥其性能优势。
技术实现要素:
[0005]
要解决的技术问题
[0006]
为了提高阵列的方位估计性能,本发明提出一种基于相位模态理论的高阶声场传感器阵列的方位估计方法,采用基于相位模态理论的高阶声场传感器作为阵元,利用每个阵元的多维输出搭建长矢量及张量信号模型,分别使用music和张量music进行doa估计,可以发现其doa估计性能优于矢量阵。
[0007]
技术方案
[0008]
一种基于相位模态理论的高阶声场传感器阵列的方位估计方法,其特征在于步骤如下:
[0009]
1)高阶声场传感器阵列设计:高阶声场传感器阵列包含n个阵元,每个高阶声场传感器由m个声压传感器在半径为r的圆上均匀分布构成,阵元位置等效为圆的中心,因此单个阵元m个声压传感器的接收信号矩阵为x(t)=[x1(t),
…
,x
m
(t)]
t
,元素x
m
(t)=a
m
(θ)s(t)+e(t)为声压传感器m的接收信号,其中为导向矢量中m对应的元素,e(t)为它的接收噪声,p
m
为它的坐标,s(t)为声源信号,u=[cos(θ),sin(θ)]
t
为声源的方向向量,(
·
)
t
表示矩阵的转置,t∈1,2,
…
n
s
为快拍编号,j为虚数单位。
[0010]
2)相位模态信号提取:利用阵元上声压传感器的接收信号x(t)提取相位模态信号
[0011][0012]
其中,n=0,1,
…
,n
max
为模态阶数,模态最高阶数满足n
max
≤m/2,m为阵元中声压传感器编号,m=1,2,
…
,m,为声压传感器m和圆心连线与传感器1的夹角。每个阵元有n
c
=n
max
+1路输出信号。
[0013]
对应的每个阵元的导向矢量中的元素为:
[0014][0015]
其中,a
m
(θ)为导向矢量中声压传感器m对应的元素,波数k=2π/λ。由此相位模态信号可表示为e
n
=j
n
j
n
(kr)e
‑
inθ
s(t)+e
′
(t)=f
n
(θ)s(t)+e
n
′
(t),其中e
n
′
(t)为相应运算后的噪声,j
n
(
·
)为n阶贝塞尔函数。
[0016]
3)信号模型构建:高阶声场传感器输出信号具有多维结构,可构建为长矢量或张量模型。
[0017]
长矢量模型将阵元的每一路输出信号e
n
等效为单个独立阵元的输出,由此可构建阵列的输出矩阵为其中为高阶声场传感器阵列的导向矢量,e
′
(t)为相应的噪声矩阵。从而获得协方差矩阵r=e[xx
h
]。表示克罗内克积,(
·
)
h
表示矩阵的共轭转置,e(
·
)表示求期望。
[0018]
张量信号模型保留了高阶声场传感器的多维信号结构,利用阵元的多路输出构建
阵列的输出张量其中,为高阶声场传感器阵列的导向矩阵。由此可得协方差张量传感器阵列的导向矩阵。由此可得协方差张量表示两个矩阵的外积运算,(
·
)
*
表示矩阵的共轭。
[0019]
4)doa估计:对于长矢量模型,利用奇异值分解r=uσu
‑1求得r的子空间为u,其中σ是元素为特征值的对角矩阵。根据目标数截去k个较大特征值对应的特征向量得到噪声子空间u
n
,可得music空间方位谱:
[0020][0021]
其中,||
·
||表示欧几里得范数。
[0022]
对于张量模型,通过高阶奇异值分解求解协方差张量t对应模的子空间u1和u2,其中k为核张量,
×
r
表示张量的r模乘积。根据相应的较大特征值个数截取其噪声子空间得和可得t
‑
music空间方位谱:
[0023][0024]
最终通过谱峰搜索获取目标方位。
[0025]
有益效果
[0026]
本发明提出的一种基于相位模态理论的高阶声场传感器阵列的方位估计方法,高阶声场传感器由声压传感器组合而成,相较于矢量传感器,阵元的物理结构较为简单,而且可以通过增加声压传感器数目来获取更高阶的信号。相较于矢量水听器阵列,高阶声场传感器阵列对多目标有更好的分辨能力,而且在成功分辨的情况下有更小的均方误差。
附图说明
[0027]
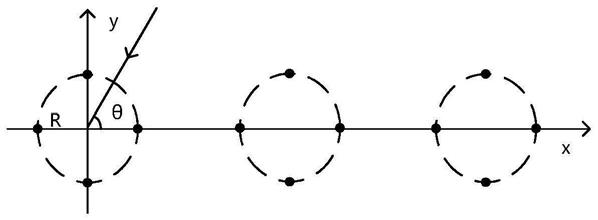
图1是高阶声场传感器阵列示意图;
[0028]
图2是各阶模态对各方向的归一化响应幅度;
[0029]
图3是高阶声场传感器阵列doa估计算法流程示意图;
[0030]
图4是在具体例子的条件下高阶声场传感器阵列空间方位谱;
[0031]
图5是不同阶数的高阶声场传感器阵列与矢量传感器阵列对双目标的分辨概率及成功分辨情况下的均方根误差(root mean square error,rmse)随信噪比(signal
‑
to
‑
noise ratio,snr)变化情况。
具体实施方式
[0032]
现结合实施例、附图对本发明作进一步描述:
[0033]
1.本发明适用的信号模型如下:
[0034]
在同一平面中有k个远场非相干窄带源,阵列有n个阵元,如图1所示,每个高阶声场传感器由m个声压传感器在半径为r的圆上均匀分布构成,阵元位置等效为圆的中心。导向矢量中a(θ
j
)可以表示为
[0035][0036]
其中p=[x,y]
t
表示阵列中声压传感器位置,x和y分别为阵元在直角坐标系下的横纵坐标,u
j
=[cos(θ
j
),sin(θ
j
)]
t
,j=1,2,
…
k表示声源的方向向量,(
·
)
t
表示矩阵的转置,j为虚数单位。
[0037]
定义声源发出的窄带不相关信号为s(t)=[s1(t),
…
,s
k
(t)]
t
,则阵列中的声压传感器的接收信号矩阵为x(t)=[x1(t),
…
,x
mn
(t)]
t
为
[0038]
x(t)=a(θ)s(t)+e(t)
[0039]
其中,t∈1,2,
…
n
s
为快拍编号,阵列流形矩阵a(θ)=[a(θ1)
ꢀ…ꢀ
a(θ
k
)],s(t)=[s1(t),
…
,s
k
(t)]
t
为声源信号矩阵,e(t)为阵列接收到的噪声矩阵,假设每一个阵元上接收到噪声的均为各向同性噪声场,阵元间的噪声不相关,信号与噪声不相关。
[0040]
根据采样定理,高阶声场传感器最高阶数n
max
≤m/2。此外,它的尺寸受到阵列阵元间距d的限制:
[0041][0042]
2.本发明中目标方位估计算法包括以下步骤:
[0043]
1)利用每个阵元的声压传感器接收信号x(t)求相位模态信号:
[0044][0045]
其中,n=0,1,
…
,n
max
为模态阶数,m为阵元中声压传感器编号,为声压传感器m和圆心连线与传感器1的夹角。
[0046]
每个阵元可由m个声压传感器的接收信号,获得n
c
=n
max
+1个输出信号,因此整个阵列可获取nn
c
个输出信号。对应的每个阵元的导向矢量中的元素为:
[0047][0048]
其中,a
m
(θ)为导向矢量中声压传感器m对应的元素,图2给出了各阶模态的归一化响应幅度。每个阵元上的n阶相位模态信号可表示为如下形式:
[0049]
e
n
(kr,θ)=j
n
j
n
(kr)e
‑
jnθ
s(t)+e
′
(t)=f
n
(θ)s(t)+e
n
′
(t)
[0050]
其中e
n
′
(t)为运算后的噪声,j
n
(
·
)为n阶贝塞尔函数。
[0051]
2)构建高阶声场传感器阵列信号模型:
[0052]
长矢量信号模型将每一个信号看作是一个独立阵元的输出,因此在上一步中获得的信号可以等效为nn
c
个阵元的输出,由此构建出一个nn
c
×
n
s
的输出信号矩阵x=l(θ)s(t)+e
′
(t),其中,n
s
为快拍数,为θ方向的高阶声场传感器阵列导向矢量,e
′
(t)为相应的噪声矩阵。协方差矩阵为:
[0053][0054]
其中,(
·
)
h
表示矩阵的共轭转置,e(
·
)表示求期望。
[0055]
张量信号模型中保留了高阶声场传感器原本的多维信号结构,将每个阵元的多路输出存储在一个n
×
n
c
的矩阵中,由此构建整个阵列n
×
n
c
×
n
s
的输出张量y=h(θ)s(t)+e
′
(t)中,其中,为θ方向的高阶声场传感器阵列导向矩阵。协方差张量为:
[0056][0057]
其中,表示两个矩阵的外积运算,(
·
)
*
表示矩阵的共轭。
[0058]
(3)doa估计
[0059]
在长矢量模型模型中将协方差矩阵统一记为r,通过奇异值分解r=uσu
‑1求得r的子空间为u,σ是元素为特征值的对角矩阵。根据目标数k截去k个较大特征值对应的特征向量,得到噪声子空间u
n
,则music空间方位谱为:
[0060][0061]
其中,||
·
||表示欧几里得范数。
[0062]
在张量模型中,对t进行高阶奇异值分解所得结果为:
[0063][0064]
其中k为核张量,u1和u2分别为对应模的子空间,
×
r
表示张量的r模乘积,根据相应较大特征值个数截取其噪声子空间得和则t
‑
music空间方位谱为:
[0065][0066]
最终通过谱峰搜索获取目标方位。
[0067]
图3给出了高阶声场传感器阵列完整的方位估计流程。
[0068]
具体实施例:
[0069]
在同一平面中存在k=2个高斯随机信号源,真实的波达方向θ=[50
°
,60
°
]。以阵元数为m=6的ula为例,阵元间距为4khz对应的半波长,每个阵元接收到的噪声为各向同性噪声,各个阵元之间噪声不相关。
[0070]
高阶声场传感器(hoas)尺寸满足kr=1,阶数为n
max
。单个矢量传感器(vs)的方向矢量为v(θ)=[1,cos(θ),sin(θ)]
t
。仿真中声速为1500m/s,快拍数为200,蒙特卡洛实验次数为500。
[0071]
成功分辨两阵元的方位估计结果应满足以下条件:
[0072][0073]
其中θ1和θ2为实际目标方位,和为仿真结果。rmse的计算公式为:
[0074][0075]
其中t
′
为蒙特卡洛实验总次数,t
′
为蒙特卡洛实验编号。
[0076]
图4给出了snr=5db时高阶声场传感器和矢量传感器组成的ula单次仿真所得归
一化空间方位谱。从中可以看出,高阶声场传感器阵列和矢量传感器阵列在长矢量和张量模型下均能分辨出两个目标。此图仅说明高阶声场传感器及相应算法的合理性。
[0077]
图5比较了不同阶数高阶声场传感器阵列和矢量传感器阵列在各个信噪比下对两目标的分辨概率,及成功分辨后的均方根误差。对于music算法,在给定仿真条件下snr为3db时,高阶声场传感器ula的双目标分辨概率较矢量ula高出0.5。对于t
‑
music算法,在给定仿真条件下snr为
‑
6db时,4阶高阶声场传感器ula的双目标分辨概率较2阶高阶声场传感器ula高出0.3。从中可以看出较高阶的高阶声场传感器阵列的doa性能优于低阶的高阶声场传感器阵列。无论是music还是t
‑
music方法,高阶声场传感器的doa估计性能优于矢量传感器阵列。而t
‑
music算法的方位估计性能也优于music算法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1