一种轨控发动机在轨故障检测系统和方法与流程
1.本发明涉及轨控发动机在轨故障检测技术领域,具体涉及一种轨控发动机在轨故障检测系统和方法。
背景技术:
2.轨控发动机是为空间飞行器提供轨道控制所需控制力的系统,用于完成末速修正、轨道控制等任务。由于系统结构复杂,需在恶劣的空间环境在轨长时间飞行,不确定性因素多,工作过程中几乎所有零部件都在动作,堵、卡、漏等故障时有发生。故障发生后,轻则影响系统性能,重则寿命缩短,甚至空间任务失败。若能在轨实时检测轨控发动机故障,便可在发生故障后迅速采取关闭相应自锁阀、启用冗余备份发动机等措施,从而隔离故障,避免带来更坏影响。此外,现有轨控发动机的故障检测一般由地面人员通过实时遥测量判断,在轨故障检测方法的相关文献资料较少。当前我国测控网络覆盖有限,空间飞行器轨控发动机故障后人工干预能力有限。因此,对于轨控发动机在轨故障检测系统和方法有迫切的需求。
技术实现要素:
3.本发明的目的在于提供一种轨控发动机在轨故障检测系统和方法,解决空间飞行器轨控发动机无法进行在轨实时故障检测的问题。
4.为达到上述目的,本发明采用下述技术方案:
5.本发明一方面提供一种轨控发动机在轨故障检测系统,所述系统包括:
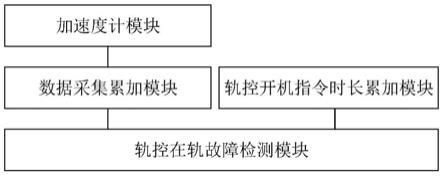
6.加速度计模块、数据采集累加模块、轨控开机指令时长累加模块和轨控在轨故障检测模块;
7.其中,
8.加速度计模块接收数据采集累加模块按周期发送来的数据采集命令,加速度计模块接收到某一周期的数据采集命令后,实时测量空间飞行器的x轴、y轴和z轴三个方向的线性加速度并产生相应的电流信号,再将电流信号转换为电压信号,并将电压信号进行放大、驱动和滤波处理后再对处理后的电压信号进行信号调理和a/d转换进而生成该周期内的速度增量信息,最终将生成的该周期内的速度增量信息发送给数据采集累加模块;
9.数据采集累加模块按周期向加速度计模块发送数据采集命令,接收并累加预定时间内加速度计模块发送来的各个周期内的速度增量信息,并将最终生成的累加速度增量信息发送给轨控在轨故障检测模块;
10.轨控开机指令时长累加模块用于累加预定时间内系统向轨控发动机发送的各个周期内的开机指令的时长,并将最终生成的累加轨控开机指令时长发送给轨控在轨故障检测模块;
11.轨控在轨故障检测模块根据接收到的累加速度增量信息和累加轨控开机指令时长对轨控发动机进行实时故障判断;
12.其中,
13.所述数据采集累加模块和轨控开机指令时长累加模块中的周期和预定时间相同。
14.在一个具体实施例中,所述数据采集累加模块的速度增量信息累加方法包括:
15.创建一个m*f行3列的二维数组dvbuf,并初始化为0;
16.在每个采样周期开始时移动一次二维数组dvbuf的内容,即:
17.dvbuf[i][0]=dvbuf[i
‑
1][0]
[0018]
dvbuf[i][1]=dvbuf[i
‑
1][1]
[0019]
dvbuf[i][2]=dvbuf[i
‑
1][2]
[0020]
记录当前采样周期的速度增量信息至二维数组dvbuf,即:
[0021]
dvbuf[0][0]=dvx
[0022]
dvbuf[0][1]=dvy
[0023]
dvbuf[0][2]=dvz
[0024]
计算累加m秒内加速度计模块发送来的各个周期内的速度增量信息,得到累加速度增量信息dv,即:
[0025]
sumdvx=|dvbuf[0][0]+dvbuf[1][0]+
…
+dvbuf[m*f
‑
1][0]|
[0026]
sumdvy=|dvbuf[0][1]+dvbuf[1][1]+
…
+dvbuf[m*f
‑
1][1]|
[0027]
sumdvz=|dvbuf[0][2]+dvbuf[1][2]+
…
+dvbuf[m*f
‑
1][2]|
[0028]
dv=sumdvx+sumdvy+sumdvz
[0029]
其中,
[0030]
dvx、dvy和dvz分别为当前采样周期内空间飞行器在x轴、y轴和z轴三个方向的速度增量信息,单位为m/s;
[0031]
m为缓存数据长度即所述预定时间,单位为s;f=1/t,为采样频率,单位为hz;t为所述周期,单位为s;
[0032]
其中,i取m*f
‑
1~1。
[0033]
在一个具体实施例中,所述轨控开机指令时长累加模块的开机指令时长累加方法包括:
[0034]
首先创建一个m*f列的一维数组tbuf,并初始化为0;
[0035]
在每个采样周期开始时移动一次一维数组tbuf的内容,即:
[0036]
tbuf[i]=tbuf[i
‑
1]
[0037]
记录当前采样周期系统向轨控发动机发送的开机指令时长至一维数组tbuf;若当前采样周期内系统向轨控发动机发送的指令为开机,则tbuf[0]=t,否则tbuf[0]=0;
[0038]
计算累加m秒内系统向轨控发动机发送的各个周期内的开机指令的时长,得到累加轨控开机指令时长t
on
,即:
[0039]
t
on
=tbuf[0]+tbuf[1]+
…
+tbuf[m*f
‑
1]。
[0040]
在一个具体实施例中,所述轨控在轨故障检测模块的故障判断方法包括:
[0041]
轨控发动机开机时,若t
on
>p_t
on
lim且dv<p_dv
on
lim,则认为轨控发动机发生了无法打开故障;
[0042]
其中,
[0043]
p_t
on
lim为判断轨控发动机开机故障时的开机时长门限,单位为s;p_dv
on
lim为判
断轨控发动机开机故障时的速度增量门限,单位为m/s;
[0044]
轨控发动机关机时,若t
on
=0且dv>p_dv
off
lim,则认为轨控发动机发生了无法关闭故障;
[0045]
其中,
[0046]
p_dv
off
lim为判断轨控发动机关机故障时的速度增量门限,单位为m/s。
[0047]
本发明另一方面提供一种根据上述的轨控发动机在轨故障检测系统的轨控发动机在轨故障检测方法,所述方法,包括以下步骤:
[0048]
s101:数据采集累加模块按周期向加速度计模块发数据采集命令,加速度计模块接收到某一周期的数据采集命令后,实时测量空间飞行器的x轴、y轴和z轴三个方向的线性加速度并产生相应的电流信号,再将电流信号转换为电压信号,并将电压信号进行放大、驱动和滤波处理后再对处理后的电压信号进行信号调理和a/d转换进而生成该周期内的速度增量信息,最终将生成的该周期内的速度增量信息发送给数据采集累加模块;
[0049]
s102:数据采集累加模块接收并累加预定时间内加速度计模块发送来的各个周期内的速度增量信息,并将最终生成的累加速度增量信息发送给轨控在轨故障检测模块;
[0050]
s103:轨控开机指令时长累加模块用于累加预定时间内系统向轨控发动机发送的各个周期内的开机指令的时长,并将最终生成的累加轨控开机指令时长发送给轨控在轨故障检测模块;
[0051]
s104:轨控在轨故障检测模块根据接收到的累加速度增量信息和累加轨控开机指令时长对轨控发动机进行实时故障判断。
[0052]
本发明的有益效果如下:
[0053]
相比传统的地面人工判断方法,本发明提供的一种轨控发动机在轨故障检测系统和方法,可在轨实时检测空间飞行器轨控发动机是否出现故障,简单有效,快速准确,无需增加空间飞行器配置,降低了轨控发动机对空间飞行器进行轨道控制时对地面测控资源的依赖,具有较高的工程应用价值。
附图说明
[0054]
为了更清楚地说明本申请具体实施方式或现有的技术方案,下面将对具体实施方式或现有的技术描述中所需要使用的附图作简单地介绍,显而易见的,下面描述中的附图是本申请的一种实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0055]
图1示出根据本发明一个实施例的一种轨控发动机在轨故障检测系统组成框图。
[0056]
图2示出根据本发明一个实施例的一种轨控发动机在轨故障检测系统的轨控发动机在轨故障检测方法的流程图。
具体实施方式
[0057]
为了使本发明的技术方案更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。以下通过具体实施例对本发明进行了详细的说明,但这些并非构成对本发明的限制。在不脱离本发明原理的情况下,本领域的技术人员可以做出变形与改进,也应视为本发明的保护范围。
[0058]
本实施例一方面提供一种轨控发动机在轨故障检测系统,如图1,图1示出根据本发明一个实施例的一种轨控发动机在轨故障检测系统组成框图。
[0059]
所述轨控发动机在轨故障检测系统包括:
[0060]
加速度计模块、数据采集累加模块、轨控开机指令时长累加模块和轨控在轨故障检测模块;
[0061]
其中,
[0062]
加速度计模块接收数据采集累加模块按周期发送来的数据采集命令,加速度计模块接收到某一周期的数据采集命令后,实时测量空间飞行器的x轴、y轴和z轴三个方向的线性加速度并产生相应的电流信号,再将电流信号转换为电压信号,并将电压信号进行放大、驱动和滤波处理后再对处理后的电压信号进行信号调理和a/d转换进而生成该周期内的速度增量信息,最终将生成的该周期内的速度增量信息发送给数据采集累加模块;
[0063]
数据采集累加模块按周期向加速度计模块发送数据采集命令,接收并累加预定时间内加速度计模块发送来的各个周期内的速度增量信息,并将最终生成的累加速度增量信息发送给轨控在轨故障检测模块;
[0064]
数据采集累加模块的速度增量信息累加方法包括:
[0065]
创建一个m*f行3列的二维数组dvbuf,并初始化为0;
[0066]
在每个采样周期开始时移动一次二维数组dvbuf的内容,即:
[0067]
dvbuf[i][0]=dvbuf[i
‑
1][0]
[0068]
dvbuf[i][1]=dvbuf[i
‑
1][1]
[0069]
dvbuf[i][2]=dvbuf[i
‑
1][2]
[0070]
其中,i取m*f
‑
1~1;
[0071]
记录当前采样周期的速度增量信息至二维数组dvbuf,即:
[0072]
dvbuf[0][0]=dvx
[0073]
dvbuf[0][1]=dvy
[0074]
dvbuf[0][2]=dvz
[0075]
计算累加m秒内加速度计模块发送来的各个周期内的速度增量信息,得到累加速度增量信息dv,即:
[0076]
sumdvx=|dvbuf[0][0]+dvbuf[1][0]+
…
+dvbuf[m*f
‑
1][0]|
[0077]
sumdvy=|dvbuf[0][1]+dvbuf[1][1]+
…
+dvbuf[m*f
‑
1][1]|
[0078]
sumdvz=|dvbuf[0][2]+dvbuf[1][2]+
…
+dvbuf[m*f
‑
1][2]|
[0079]
dv=sumdvx+sumdvy+sumdvz
[0080]
其中,
[0081]
dvx、dvy和dvz分别为当前采样周期内空间飞行器在x轴、y轴和z轴三个方向的速度增量信息,单位为m/s;
[0082]
m为缓存数据长度即所述预定时间,单位为s;f=1/t,为采样频率,单位为hz;t为所述周期,单位为s。
[0083]
轨控开机指令时长累加模块用于累加预定时间内系统向轨控发动机发送的各个周期内的开机指令的时长,并将最终生成的累加轨控开机指令时长发送给轨控在轨故障检测模块;
[0084]
轨控开机指令时长累加模块的开机指令时长累加方法包括:
[0085]
首先创建一个m*f列的一维数组tbuf,并初始化为0;
[0086]
在每个采样周期开始时移动一次一维数组tbuf的内容,即:
[0087]
tbuf[i]=tbuf[i
‑
1]
[0088]
其中,i取m*f
‑
1~1;
[0089]
记录当前采样周期系统向轨控发动机发送的开机指令时长至一维数组tbuf;若当前采样周期内系统向轨控发动机发送的指令为开机,则tbuf[0]=t,否则tbuf[0]=0;
[0090]
计算累加m秒内系统向轨控发动机发送的各个周期内的开机指令的时长,得到累加轨控开机指令时长t
on
,即:
[0091]
t
on
=tbuf[0]+tbuf[1]+
…
+tbuf[m*f
‑
1]。
[0092]
轨控在轨故障检测模块根据接收到的累加速度增量信息和累加轨控开机指令时长对轨控发动机进行实时故障判断;
[0093]
轨控在轨故障检测模块的故障判断方法包括:
[0094]
轨控发动机开机时,若t
on
>p_t
on
lim且dv<p_dv
on
lim,则认为轨控发动机发生了无法打开故障;
[0095]
其中,
[0096]
p_t
on
lim为判断轨控发动机开机故障时的开机时长门限,单位为s;p_dv
on
lim为判断轨控发动机开机故障时的速度增量门限,单位为m/s;
[0097]
p_t
on
lim和p_dv
on
lim的值需根据轨控发动机推力、空间飞行器质量和加速度计性能指标等,并预留一定余量具体确定。
[0098]
轨控发动机关机时,若t
on
=0且dv>p_dv
off
lim,则认为轨控发动机发生了无法关闭故障;
[0099]
其中,p_dv
off
lim为判断轨控发动机关机故障时的速度增量门限,单位为m/s。
[0100]
p_dv
off
lim的值需根据轨控发动机推力、空间飞行器质量和加速度计性能指标等,并预留一定余量具体确定。
[0101]
其中,
[0102]
所述数据采集累加模块和轨控开机指令时长累加模块中的周期和预定时间相同。
[0103]
本实施例的另一方面还提供一种根据上述的轨控发动机在轨故障检测系统的轨控发动机在轨故障检测方法,如图2,图2示出根据本发明一个实施例的一种轨控发动机在轨故障检测系统的轨控发动机在轨故障检测方法的流程图,所述方法包括以下步骤:
[0104]
s101:数据采集累加模块按周期向加速度计模块发数据采集命令,加速度计模块接收到某一周期的数据采集命令后,实时测量空间飞行器的x轴、y轴和z轴三个方向的线性加速度并产生相应的电流信号,再将电流信号转换为电压信号,并将电压信号进行放大、驱动和滤波处理后再对处理后的电压信号进行信号调理和a/d转换进而生成该周期内的速度增量信息,最终将生成的该周期内的速度增量信息发送给数据采集累加模块;
[0105]
s102:数据采集累加模块接收并累加预定时间内加速度计模块发送来的各个周期内的速度增量信息,并将最终生成的累加速度增量信息发送给轨控在轨故障检测模块;
[0106]
s103:轨控开机指令时长累加模块用于累加预定时间内系统向轨控发动机发送的各个周期内的开机指令的时长,并将最终生成的累加轨控开机指令时长发送给轨控在轨故
障检测模块;
[0107]
s104:轨控在轨故障检测模块根据接收到的累加速度增量信息和累加轨控开机指令时长对轨控发动机进行实时故障判断。
[0108]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定,对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动,这里无法对所有的实施方式予以穷举,凡是属于本发明的技术方案所引伸出的显而易见的变化或变动仍处于本发明的保护范围之列。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1