一种正负旋塞曼空间四频差动激光陀螺的制作方法
1.本发明属于激光陀螺领域,尤其涉及一种正负旋塞曼空间四频差动激光陀螺。
背景技术:
2.陀螺仪是惯性导航的主要器件之一。1960年激光在世界上首次出现后,heer和rosenthal于1962提出环形激光陀螺的设想,认为可以利用激光来测量转动。经过几十年的发展,激光陀螺已经在多方面获得实际应用,成为中高等精度的主要惯性仪表之一。与传统的机电陀螺相比其具有以下一些优点:1.性能稳定,坚固可靠,抗加速度性能好,耐冲击振动能力强;比例因子稳定,典型性能为ppm量级;2.寿命长,可靠性好,典型寿命可达20万小时以上;3.无交叉耦合效应,对敏感轴正交方向上的转动角速度、角加速度及线加速度不敏感;4.角速率测量的动态范围宽,动态性能好;5.启动时间短,功耗低,体积小,重量轻,成本低;6.易与计算机接口。激光陀螺的输出信号是脉冲形式,对脉冲进行计数就得到对应转动角度的数字量,便于计算机处理;这些优点使得rlg迅速取代了精度相当的机电陀螺。尽管各种新型陀螺不断涌现,但对标度因数稳定性要求极高的中等精度应用中,rlg应是首选。
3.激光陀螺良好的性能使其成为中高等精度惯性导航的理想器件。常用的主要是二频机械抖动激光陀螺(mdrlg)和四频差动激光陀螺(nffdlg)。四频激光陀螺不存在机械噪声,具有全固态、比例因子稳定度高、信号无延时等特点,在国外已广泛应用于高精度姿态测量、精确定位定向、制导及导航等军事领域。
4.四频差动激光陀螺的思想最早由h.de lang在1964年提出,并建议采用法拉第旋光器和相位各向异性的环形谐振腔,产生四个圆偏振模频率构成四频rlg以避开闭锁问题。之后有许多团队进行了相关研究,但当时都主要因腔内元件水晶片或法拉第室的负性影响导致性能不佳而陆续下马。1978年t.dorschner等人提出用空间环路异面腔结构代替水晶片来产生互易偏频,消除了水晶片引入的双折射、损耗、温度敏感性等负性效应。空间环路异面腔可取代水晶片产生互易偏频,而非互易偏频可由法拉第室、塞曼效应、磁镜极向克尔效应来产生,这就使得除反射片外无腔内元件的四频激光陀螺的产生成为可能,但这一方案到目前尚未有实用产品出现。如磁镜偏频四频激光陀螺由于高损耗被证明并不实用,塞曼偏频四频差动激光陀螺(为与本发明的方案相区别,称之为左右旋塞曼偏频四频差动激光陀螺)则对磁场和稳频等很敏感,只有空间环路异面腔和法拉第室相结合的方案最终得以实用化。1985年litton公司购买了raytheon公司这一专利,经过一系列技术攻关,特别是成功研制了法拉第旋光玻璃表面极低损耗增透膜(<100ppm),于1991年研发出了高精度四频差动激光陀螺并批量生产,即零锁区激光陀螺zero lock
‑
in laser gyro,zlg
tm
。
5.为进一步提高四频差动激光陀螺的性能,则必须要减少陀螺腔内的元件,降低损耗。如果把平面环路四频陀螺内产生互易效应的腔内元件水晶片去除,用空间环路的互易效应来代替,那么由水晶片的安装、应力和温度等效应造成的零漂也就随之消失,激光陀螺的性能就会有所提高。但是异面腔+法拉第室方案空间四频差动激光陀螺在研制中也暴露了一些问题,比如陀螺的温度敏感性较大,零偏稳定性和零偏重复性较之高精度的二频机
械抖动激光陀螺还有差距。特别是在有些应用场合,比如卫星的高精度姿态控制与补偿、战略级的惯性导航系统等,空间四频差动激光陀螺的角度随机游走系数还显得较大。对于异面腔+法拉第室方案的四频差动激光陀螺来说,以上几项误差主要的来源都是其腔内元件——法拉第室。如果能够消除法拉第室的不利影响,那么陀螺的性能将大幅度提高。在现在的加工工艺和安装技术水平下,如果想通过专攻高性能法拉第室及其加工安装工艺来大幅提高陀螺精度已很困难,因此必须另外考虑四频激光陀螺的实现方案。综上所述,去掉腔内元件——法拉第室是获得更高精度激光陀螺的必然发展方向。前面提到的左右旋塞曼偏频四频差动激光陀螺,其腔内就无元件,理论上应该可以获得高精度的性能,但是左右旋方案在原理上有不可克服的理论缺陷,如图2所示左右旋塞曼偏频四频差动激光陀螺的基本模式分布,单陀螺对模的净增益差很大,从而光强差很大,而且这种光强差随工作点频率的变化也很大,因而影响零漂,这是左右旋塞曼偏频四频差动激光陀螺不能获得应用的主要原因。
技术实现要素:
6.本发明要解决的技术问题是怎样在去掉腔内元件的基础上提高激光陀螺的精度,提供了一种正负旋塞曼空间四频差动激光陀螺。
7.为了解决该问题,本发明所采用的技术方案是:
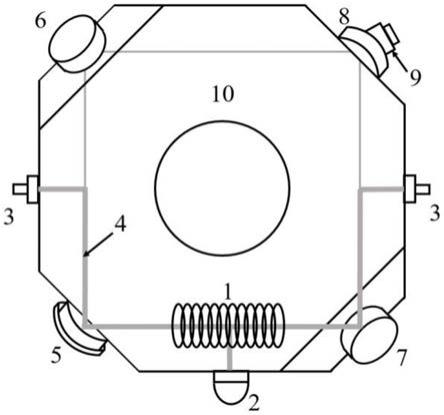
8.一种正负旋塞曼空间四频差动激光陀螺,包括异面腔体、阴极、两个阳极、在所述异面腔体的四个角上分别布设有腔平移镜以及三个输出镜,在其中一个输出镜上装设有合光棱镜,两个所述阳极分别布设在异面腔体的两个对立面上,所述阴极布设在异面腔体的一个非阳极的侧面上,在异面腔体的通光管道内充满增益介质,所述腔平移镜及三个输出镜与异面腔体一起构成陀螺的空间环路,在两个阳极和阴极之间的增益区上布设有用于产生互易偏频的导电线圈。
9.与现有技术相比,本发明所取得的有益效果是:
10.本发明一种正负旋塞曼空间四频差动激光陀螺,在导电线圈通电后产生磁场,与增益介质相互作用通过塞曼效应产生四频差动激光陀螺工作所需的互易偏频,并利用异面腔体的空间旋光效应提供非互易偏频,取消了传统四频差动激光陀螺中的法拉第室,去除了陀螺腔内元件;平衡了单陀螺对模的净增益,大幅减小了单陀螺的光强差,从而最终提高四频差动激光陀螺的性能。
附图说明
11.图1为本发明激光陀螺结构示意图;
12.图2为左右旋塞曼偏频四频差动激光陀螺基本模式分布的示意图;
13.图3为本发明正负旋塞曼空间四频差动激光陀螺基本模式分布的示意图;
具体实施方式
14.现有技术中与本发明最接近的左右旋四频差动激光陀螺,在左右旋塞曼激光陀螺方案中,该结构利用水晶片对其光轴方向传播的左、右旋圆偏振光的折射率不同,使左右旋圆偏振在激光陀螺中的光程不等,图2示出了左右旋塞曼偏频四频差动激光陀螺的模式分
布,可以看出同q纵模有一频差。纵向磁场作用于增益介质,利用塞曼效应产生正、负旋圆偏振光的频差。对于同为正(负)旋光来说,左、右旋在光路中传播方向相反;对于同为左(右)旋光来说,正、负旋在光路中传播方向相反。因此,该方案中,塞曼陀螺由一对左旋单陀螺和右旋单陀螺组成。四个频率模式均为同q纵模,并且左旋的顺时针模式(v
lc
)和左旋的逆时针模式(v
lcc
)构成左旋单陀螺,右旋的顺时针模式(v
rc
)和右旋的逆时针模式(v
rcc
)构成右旋单陀螺,固定偏频v
h
为纵向磁场作用于增益介质,利用塞曼效应产生正、负旋圆偏振光的频差。由于左右旋对模的中心频率间隔v
rl
=v
r0
‑
v
l0
较之单陀螺内部的偏频v
h
大很多,一般为几百兆赫兹,故一对左旋模式组成左旋单陀螺,一对右旋模式组成右旋单陀螺。在外界输入角速度ω的作用下,左右旋单陀螺的拍频分别为:
[0015][0016]
其中v
l
为左旋单陀螺的输出频率,v
r
为右旋单陀螺的输出频率,v
ω
为外界输入角速度ω引起的频率改变。对频率为v
r
和v
l
的输出信号进行分别计数然后求二者的差值、和值,即为:
[0017][0018]
其中v
o
为左右旋单陀螺的输出频率之差、与输入角速度ω成正比,v
sum
为法拉第偏频量v
h
的两倍,a为环形光路所包围的面积,l为环形光路的几何长度,λ为波长。空间环路四频激光陀螺的偏频量由于差动的原因,v
h
的稳定性基本上已不再影响角速度的计算,另外比例因子为二频单陀螺的2倍,灵敏度提高了一倍。
[0019]
评估一个陀螺的设计方案优劣,主要是对其误差进行分析,主要看是否可以采取相应措施消除或控制误差到可接受范围之内。该陀螺为平面腔加水晶片方案,其腔内元件较少,平面腔加工难度低,有其优点。但是其有严重的缺点:
[0020]
一是每个单陀螺的对模在净增益上有比较大的差异。以左旋单陀螺为例,其两个模式来源于不同的增益曲线,在各自增益曲线的位置差别很大,单陀螺对摸的净增益差就大,从而光强差很大,而且这种光强差随工作点频率的变化也很大,因而影响零漂,这是左右旋频四频激光陀螺不能获得应用的主要原因之一。
[0021]
二是为避免腔内出现异q纵模以及为保证各工作模式净增益大于零,都要求磁场不能过大,而偏频量正比于所加磁场,磁场的大小限制了偏频量的大小,也就限制了的测量范围。
[0022]
如图1所示,本发明一种正负旋塞曼空间四频差动激光陀螺,包括异面腔体、阴极、两个阳极、在所述异面腔体的四个角上分别布设有腔平移镜以及三个输出镜,在其中一个输出镜上装设有合光棱镜,两个所述阳极分别布设在异面腔体的两个对立面上,所述阴极布设在异面腔体的一个非阳极的侧面上,在异面腔体的通光管道内充满增益介质,所述腔平移镜及三个输出镜与异面腔体一起构成陀螺的空间环路,在两个阳极和阴极之间的增益区上布设有用于产生互易偏频的导电线圈。
[0023]
本发明四频激光陀螺腔内的任意一个单陀螺的恒定非互易偏频由空间环路效应
产生。
[0024]
该恒定非互易偏频决定了陀螺的动态测量范围,理论上可以很大,可以设计偏频比较大的空间环路。但是该非互易偏频量不应设计的太大,因为它还决定后续陀螺检测电路的带宽,随着电路带宽的增加检测电路信噪比会下降。另外偏频过大,单陀螺内部的光强差也会变大,并且会随工作点的变化而变化,从而会对零漂产生不利影响。
[0025]
本发明克服左右旋陀螺传统观念上使用异面腔体产生互异偏频,导电线圈所加磁场产生非互易偏频的思想,本发明使用的结构与之相反,导电线圈所加磁场产生互异偏频,异面腔体产生非互易偏频,如图3所示给出了本发明正负旋塞曼空间四频差动激光陀螺基本模式分布的示意图,与图2相比,本发明可以平衡单陀螺对模的净增益,大幅减小单陀螺的光强差;同时也不存在腔内元件,从而获得更高性能的四频差动激光陀螺。图3中v
nc
为正旋的顺时针模式输出频率、v
ncc
为正旋的逆时针模式输出频率、v
pc
为负旋的顺时针模式输出频率、v
pcc
为负旋的逆时针模式输出频率。
[0026]
导电线圈所加的磁场应使正、负旋光的增益峰间隔δν
z
大于纵模间隔。同时,在导电线圈所加的磁场使正、负旋光的增益峰间隔δν
z
大于纵模间隔的情况下,导电线圈所加的磁场可以使相邻纵模ν
q+1
的正旋净增益大于零、负旋净增益小于零;使相邻纵模ν
q
的正旋净增益小于零、负旋净增益大于零;从而可以避免两个单陀螺之间的竞争耦合。
[0027]
根据正负旋塞曼空间四频差动激光陀螺的结构,从光强和频率的自洽方程组出发,推导出正负旋塞曼空间四频差动激光陀螺的自洽方程组模型,考虑实际情况,为讨论问题的方便,忽略一些误差效应,突出主要误差效应,得到简化的零漂模型。按照上述研究方案,参考左右旋四频激光陀螺在近独立陀螺近似下的零漂简化模型,建立相应的正负旋塞曼空间四频差动激光陀螺的零漂简化模型。这是因为基于陀螺误差效应主要来源于单陀螺内部的耦合效应,陀螺间的耦合效应与之相比是小的,如果把两个陀螺间的耦合效应加进去,也只能是在定量的方面有一些效果,并且也还不能完全精确,而对于应用层面来讲并无实质区别。因此简化模型建立在近独立陀螺近似的基础上。正负旋塞曼空间四频差动激光陀螺在近独立陀螺近似下输出拍频的基本表达式为:
[0028][0029]
上式中,ω1=2π
·
v
ncc
为正旋的逆时针角频率,ω2=2π
·
v
nc
为正旋的顺时针角频率,ω3=2π
·
v
pc
为负旋的顺时针角频率,ω4=2π
·
v
pcc
为负旋的逆时针角频率,ω
ω
=2π
·
v
ω
为为外界输入角速度ω引起的角频率改变,ω
h
=2π
·
v
h
为固定偏频的角频率;sfc
12
是介质反常色散效应对负旋陀螺的相对比例因子修正,sfc
34
是对正旋陀螺的相对比例因子修正,sfc是差动陀螺的相对比例因子修正,其表达式为正,sfc是差动陀螺的相对比例因子修正,其表达式为为波数即单位长度波长数的2π倍,v为放电毛细管内朗缪尔流动的两臂总平均流速;ρ、τ、β、θ分别为自推斥系数、互推斥系数、自饱和系数、互饱和系数;γ为单程损耗;
为引入的频率参量,(为多普勒展宽频带的半宽度,为正负旋光增益曲线的中心频率);
‑
sfc
×
4kv为朗缪尔效应项,为差损零漂项。
[0030]
根据式1,并结合理论研究的结果,分析出各项零漂对误差的影响,然后再根据误差模型,给出抑制各项误差的相应措施,将各项误差都控制在可以接受的范围之内。初步分析,得出以下定性结论:
[0031]
1.差动陀螺的相对比例因子修正sfc导致的零漂误差;由于相对比例因子的稳定性与陀螺频率、增益的稳定性直接相关,因此频率和增益的稳定控制仍然是该方案陀螺所必须的。实际中,要采用高精度的检测与控制电路,尽可能的提高频率稳定和增益稳定的控制精度;
[0032]
2.介质反常色散效应对正负旋单陀螺的相对比例因子修正之差(sfc
12
‑
sfc
34
)导致的零漂;该项表明(sfc
12
‑
sfc
34
)越小越好,可以通过调腔改变陀螺在增益曲线上的位置而使此项为零或接近为零。这与左右旋陀螺的最佳工作点控制是一致的;
[0033]
3.sfc
×
4kv此项误差为朗缪尔流动项,通过放电区对称合理的设计,这项误差可以被有效抑制;
[0034]
4.为差损零漂项,这项误差比较复杂,需要进一步提高陀螺的工艺以降低这项误差。现在左右旋四频陀螺的工艺已经成熟,这项误差的抑制方法与之是相通的,实际中可以直接借鉴。
[0035]
通过正负旋塞曼空间四频差动激光陀螺在近独立陀螺近似下输出拍频的基本表达式,对误差的分析可知,使用本发明的结构可以实现对零漂误差的控制,这种陀螺方案是具有充分可行性的。
[0036]
并且本发明在导电线圈通电后产生磁场,与增益介质相互作用通过塞曼效应产生四频差动激光陀螺工作所需的互易偏频,并利用异面腔体的空间旋光效应提供非互易偏频,取消了传统四频差动激光陀螺中的法拉第室,去除了陀螺腔内元件;平衡了单陀螺对模的净增益,大幅减小了单陀螺的光强差,从而最终提高四频差动激光陀螺的性能。
[0037]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1