基于变微分步长相对变化熵的目标检测与信号频率估计方法
1.本发明涉及水声信号处理技术领域,具体为一种水中目标检测与信号频率估计方法。
背景技术:
2.水中远距离目标的检测方法中较为常用的是线谱检测,线谱检测中常用的方法有 自相关检测方法、快速傅里叶变换方法、自适应线谱增强方法等,但这些方法很多需 要得到线谱先验信息,无此先验信息时,结果会受到很大的影响,这种搜索过程很大 程度上依赖于经验。同时,由于声隐身技术的高速发展,机械设备主动隔振、主动约 阻尼、声学智能结构等技术的陆续应用,水中目标辐射噪声的线谱得到了很好的控制, 线谱的幅值变得很小、能量大幅度降低、甚至数量可控。
[0003][0004]
连续谱是目标辐射噪声频谱的另一重要特征和组成部分,具有单独的谱峰。张晓勇等从频率与能量分布的角度出发,在顺势频率方差检测器的基础上,推导出了窄带信号和宽带信号同时满足的瞬时频率分布与能量分布的表达式,从而利用目标辐射噪声连续谱分量存在一个能量相对集中的频率中心这一特性,利用瞬时频率分析进行描述,实现了利用舰船辐射噪声连续谱进行目标检测,然而,这种基于能量的检测方法,在远距离下结果会受到较大影响。
技术实现要素:
[0005]
为了克服现有技术的不足,本发明提供一种基于变微分步长相对变化熵的目标检测与信号频率估计方法。针对特征线谱不断被削弱甚至消除的问题,结合复杂海洋环境下的非线性特征表征的需要,本发明通过提取目标辐射噪声中固有的非线性特征,提供一种不需任何先验信息的水中目标远距离检测方法,并增大了目标检测的距离,提高了方法的可适用性,并在检测水中目标的同时,通过相对变化熵与微分步长之间的关系,对目标信号特征线谱的频率进行估计。
[0006]
针对水下微弱信号方向估计的背景噪声复杂多样和低信噪比条件下目标信号检测难度大等问题,提出一种基于变微分步长相对变化熵的目标检测与信号频率估计方法,通过选取合适的微分步长,利用噪声与信号之间相关性的差异,进一步提升对目标信号的信噪比增益,从而实现对水下弱小目标的远距离检测,同时利用微分步长与相对变化熵数值之间的关系,实现对水中弱小目标特征线谱的估计。本发明能够精确检测水中弱小目标并实现对水中目标特征线谱的估计,具有检测信噪比低,频率估计精度高等优点。
[0007]
本发明解决其技术问题所采用的技术方案的步骤如下:
[0008]
步骤一:利用声呐采集海洋中的声信号,记为s(t),即为输入信号;
[0009]
步骤二:根据takens重构定理对接收数据s(t)进行相空间重构;
[0010]
将接收到声信号的数据,利用g
‑
p算法求取数据的重构维数与时间延迟,最后完成
接收数据的相空间重构:
[0011]
s(t
i
)=[s(t
i
),s(t
i
+τ),s(t
i
+2τ),
…
,s(t
i
+(m
‑
1)τ)]
ꢀꢀꢀ
(1)
[0012]
其中s(t
i
)表示重构后信号第i个向量,s(t
i
)表示输入信号第i个数据,τ为延迟时间,m为重构维数;
[0013]
步骤三:利用式(1)将初始时刻接收到的数据s1(t)进行相空间重构,得到重构后的数据s1(t);
[0014]
步骤四:将微分步长设定为l+d,l与d是设定的数据重组间隔,根据重构后的数据s1(t)按照式(2)进行序列的重组,得到重组序列s
11
(t),公式(2)为:
[0015]
s
11
(t)={s1(t
l+d+1
),s1(t
l+d+2
),s1(t
l+d+3
),
…
,s1(t
n
‑1),s1(t
n
),s1(t1),s1(t2),
…
,s1(t
l+d
)}
ꢀꢀꢀ
(2)
[0016]
然后按照式(3)得到s1(t)的一阶微分矩阵s
′1(t);
[0017][0018]
其中,t是采样周期;
[0019]
步骤五:将步骤四得到的微分矩阵s
′1(t)按照步骤四,进行n次循环微分得到 s1″′
(t),最后求取循环微分矩阵s1″′
(t)的奇异值并记为参考向量a;
[0020]
步骤六:将初始时刻之后的接收的数据s2(t),按照步骤二进行相空间重构,得到重构后的数据s2(t),重构完成后按照步骤四与步骤五,求取s2(t)的循环微分矩阵s
″′2(t),并求取s
″′2(t)的奇异值并记为待测向量b;
[0021]
步骤七:将待测向量b与参考向量a按照式(4)进行计算,得到相对向量g:
[0022][0023]
其中:i=1、2
…
m,代表相应向量中元素的下标;
[0024]
步骤八:按照式(5)求取接收数据的相对膨胀熵;
[0025][0026]
其中:f(c)表示相对向量c中元素的乘积;
[0027]
步骤九:从1到k依次改变d的取值,依次进行步骤四至步骤八,得到相应步长对应的相对变化熵,最终得到步长d与相对变化熵之间的对应关系图,如果出现如图 2所示的规则的深凹,则认为有目标出现,凹陷的深度为超过没有目标时最小值的1.5 倍,则认为有深凹出现,并通过深凹之间步长的间距l以及公式(6),估算出目标的特征线谱的频率f:
[0028][0029]
其中,f为目标特征线谱频率,l为出现规则深凹的步长间距,f
s
为采样率,计算出目标频率之后,通过特征线谱频率的大小以及差别,实现对不同目标的分类以及识别。
[0030]
所述l是一个定值,取值为10000。
[0031]
所述d是一个变量,取值范围为1,2,3,....,fs,fs为声信号数据的采样率。
[0032]
所述n次为1000次。
[0033]
所述k大于等于100。
[0034]
本发明的有益效果在于结合复杂海洋环境下目标检测的需要,利用多阶循环变步长微分相对变化熵分析方法,对步长与相对变化熵数值的对应关系进行分析,进而提取出反应目标非线性特性的非线性特征,最后实现对水中目标的检测,并通过微分步长对相对变化熵数值大小的影响,估算出目标特征线谱的频率。本发明能够做到无先验信息的水中目标远距离检测,具有检测距离远、不需先验信息等优点。
附图说明
[0035]
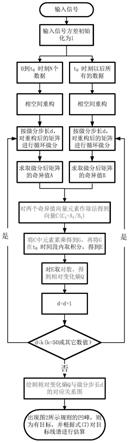
图1为本发明的总体方法框图。
[0036]
图2为本发明含噪信号(
‑
31db)变微分步长相对变化熵数值与步长对应关系图。
[0037]
图3为本发明高斯白噪声变微分步长相对变化熵数值与步长对应关系图。
具体实施方式
[0038]
下面结合附图和实施例对本发明进一步说明。
[0039]
一种基于变微分步长相对变化熵的目标检测与信号频率估计方法,步骤如下:
[0040]
步骤一:利用声呐采集海洋中的声信号,记为s(t),即为输入信号;
[0041]
步骤二:根据takens重构定理对接收数据s(t)进行相空间重构;
[0042]
将接收到声信号的数据,利用g
‑
p算法求取数据的重构维数与时间延迟,最后完成接收数据的相空间重构:
[0043]
s(t
i
)=[s(t
i
),s(t
i
+τ),s(t
i
+2τ),
…
,s(t
i
+(m
‑
1)τ)]
ꢀꢀꢀ
(1)
[0044]
其中s(t
i
)表示输入信号第i个数据,s(t
i
)表示重构后信号第i个向量,τ为延迟时间,m为重构维数。
[0045]
步骤三:利用式(1)将初始时刻接收到的数据s1(t)进行相空间重构,得到重构后的数据s1(t);
[0046]
步骤四:将微分步长设定为l+d,根据重构后的数据s1(t)按照下式(2)进行序列 的重组,得到重组序列s
11
(t),然后按照下式(3)得到s1(t)的一阶微分矩阵s
′1(t);
[0047]
s
11
(t)={s1(t
l+d+1
),s1(t
l+d+2
),s1(t
l+d+3
),
…
,s1(t
n
‑1),s1(t
n
),s1(t1),s1(t2),
…
,s1(t
l+d
)}
ꢀꢀꢀ
(2)
[0048][0049]
步骤五:将步骤四得到的微分矩阵s
′1(t)按照步骤四,进行多次循环微分得到 s1″′
(t),最后求取循环微分矩阵s1″′
(t)的奇异值并记为参考向量a;
[0050]
步骤六:将初始时刻之后的接收的数据s2(t),按照步骤二进行相空间重构,得到重构后的数据s2(t),重构完成后按照步骤四与步骤五,求取s2(t)的循环微分矩阵s
″′2(t),并求取s
″′2(t)的奇异值并记为待测向量b;
[0051]
步骤七:将待测向量b与参考向量a按照下式(4)进行处理,得到相对向量c;
[0052][0053]
其中:i=1、2
…
m,代表相应向量中元素的下标,m为步骤二中的嵌入维数。
[0054]
步骤八:按照下式(5)与(6)求取接收数据的相对膨胀熵;
[0055][0056][0057]
其中:f(c)表示相对向量c中元素的乘积。
[0058]
步骤九:从1到k依次改变d的取值(k=100或其它更大的值),依次进行步骤四、五、六、七、八,得到相应步长对应的相对变化熵,最终得到步长d与相对变化熵之间的对应关系图。如果出现如图2所示规则的深凹,则认为有目标出现,并通过深凹之间步长的间距l以及公式(7),估算出目标的特征线谱的频率f(仿真使用的目标信号频率为50hz)。
[0059][0060]
其中:f
‑‑‑
目标特征线谱频率,l
‑‑‑
出现规则深凹的步长间距,f
s
‑‑‑
采样率。
[0061]
如图2所示,采样率f
s
=1000hz,l=20,则可以计算出
[0062]
如图2所示,为含噪信号(
‑
31db)变微分步长相对变化熵数值与步长对应关系图,当待测数据为含噪信号时,不同微分步长下相对变化熵数值与微分步长的对应关系图。
[0063]
如图3所示,为高斯白噪声变微分步长相对变化熵数值与步长对应关系图,当待测数据为高斯白噪声时,不同微分步长下相对变化熵数值与微分步长的对应关系图。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1