一种应用室内外AGV小车的激光定位装置的制作方法
一种应用室内外agv小车的激光定位装置
技术领域
[0001]
本实用新型属于agv小车的激光定位技术领域,特别是涉及一种应用室内外agv小车的激光定位装置。
背景技术:
[0002]
现有技术中,agv小车的激光定位一般是在agv小车行驶路径的周围安装多个已知坐标激光反射板,再在agv小车表面安装一个激光雷达发射激光束,同时采集由反射板反射的激光束,通过三角几何运算确定其当前的位置和方向;这种定位方法一般适用于室内,但在室外,因为场地空旷面积大,距离远;或是场地不平整,天气恶劣,灰尘大,阳光直射等等原因,使得这种定位技术存在较多问题,比如在室外需要安装很多反射板,维修复杂,容易污染;激光雷达靠反射方式来采集激光,在雨雾天,灰尘大时候,反射激光强度不够,无法进行长距离采集;由于激光雷达是一维的,地面不平整时,容易丢失激光信号。
[0003]
为了使agv小车在室外也能够较容易地被定位,我们设计一种应用室内外agv小车的激光定位装置,以解决上述问题。
技术实现要素:
[0004]
本实用新型的目的在于提供一种应用室内外agv小车的激光定位装置,解决现有的agv小车激光定位适用范围小、成本高、精度低和易受外界干扰的问题。
[0005]
为解决上述技术问题,本实用新型是通过以下技术方案实现的:
[0006]
本实用新型为一种应用室内外agv小车的激光定位装置,包括激光发射装置、激光测角装置、agv小车和测角载体,所述激光发射装置一表面与agv小车连接;所述激光测角装置一表面与测角载体连接;所述激光发射装置与激光测角装置之间相互配合,通过激光测角装置接收激光发射装置发射的激光和图像信号再进行处理;
[0007]
所述激光测角装置包括锥镜、摄像头和图像及无线通信处理器;所述锥镜周侧面粘连有若干隔离板,能够将外界的阳光隔绝开,避免阳光对激光测角装置的干扰;所述隔离板与摄像头的位置相适应;所述图像及无线通信处理器与摄像头之间电性连接。
[0008]
进一步地,所述锥镜包括锥底与锥顶;所述锥顶表面与摄像头连接;所述摄像头朝向锥镜;所述锥镜的轴心线与摄像头的轴心线重合;若干所述隔离板沿锥镜圆心放射方向均匀排布,保证锥镜只能接收其正面方向来的激光,过滤掉其他方向光线。
[0009]
进一步地,所述激光发射装置包括安装板、激光管和无线通信装置;所述安装板周侧面安装有若干激光管;所述安装板与激光管之间嵌套配合;若干所述安装板之间上下依次粘连;所述无线通信装置与激光管之间电性连接。
[0010]
进一步地,所述安装板为圆形板体结构;若干所述激光管沿安装板的圆周均匀排列;所述激光管的轴心线与安装板圆心线重合,激光发射方向由安装板圆心指向外部,形成一个360
°
的环状激光发射器。
[0011]
进一步地,所述测角载体一表面与锥镜的锥底连接;所述安装板一表面与agv小车
连接。
[0012]
进一步地,所述摄像头与激光管之间相互配合;所述无线通信装置与图像及无线通信处理器之间电性连接。
[0013]
本实用新型具有以下有益效果:
[0014]
本发明通过在每个agv小车上安装一个激光发射装置,在室外场地的r若干测角载体上均安装激光测角装置,就可以对agv小车进行准确实时定位,整个方案各组件成本低,便于安装;由于没有机械扫描速度限制,定位响应速度快;由于激光有一定的垂直发散角度,即使在场地不平整时,也能够保证很好的激光接收;激光角度测量模块直接接收agv小车发射的强激光信号,可以解决雨雾天恶劣天气和距离远时信号不稳定问题;由于在激光测角装置内部安装阳光隔离板,可以将阳光隔绝开,避免阳光的干扰。
[0015]
当然,实施本实用新型的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
[0016]
为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0017]
图1为本实用新型的一种应用室内外agv小车的激光定位装置的模拟结构示意图;
[0018]
图2为本实用新型的一种应用室内外agv小车的激光定位装置的激光测角装置结构示意图;
[0019]
图3为本实用新型的一种应用室内外agv小车的激光定位装置的激光发射装置结构示意图;
[0020]
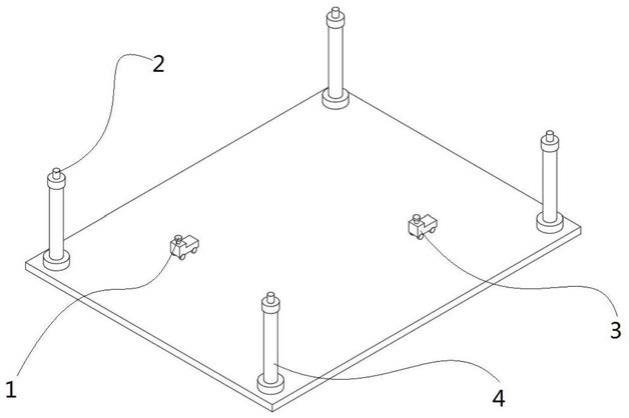
图4为agv小车与各位点位置关系示意图。
[0021]
附图中,各标号所代表的部件列表如下:
[0022]
1-激光发射装置,2-激光测角装置,3-agv小车,4-测角载体,201-锥镜,202-隔离板,203-摄像头,204-图像及无线通信处理器,101-安装板,102-激光管,103-无线通信装置。
具体实施方式
[0023]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
[0024]
请参阅图1-4所示,本实用新型为一种应用室内外agv小车的激光定位装置,包括激光发射装置1、激光测角装置2、agv小车3和测角载体4,激光发射装置1一表面与agv小车3连接;激光测角装置2一表面与测角载体4连接;激光发射装置1与激光测角装置2之间相互配合,通过激光测角装置2接收激光发射装置1发射的激光和图像信号再进行处理;
[0025]
激光测角装置2包括锥镜201、摄像头203和图像及无线通信处理器204;锥镜201周侧面粘连有若干隔离板202;隔离板202与摄像头203的位置相适应;图像及无线通信处理器
204与摄像头203之间电性连接。
[0026]
其中,锥镜201包括锥底与锥顶;锥顶表面与摄像头203连接;摄像头203朝向锥镜201;锥镜201的轴心线与摄像头203的轴心线重合;若干隔离板202沿锥镜201圆心放射方向均匀排布,保证锥镜只能接收其正面方向来的激光,过滤掉其他方向光线。
[0027]
其中,激光发射装置1包括安装板101、激光管102和无线通信装置103;安装板101周侧面安装有若干激光管102;安装板101与激光管102之间嵌套配合;若干安装板101之间上下依次粘连;无线通信装置103与激光管102之间电性连接。
[0028]
其中,安装板101为圆形板体结构;若干激光管102沿安装板101的圆周均匀排列;激光管102的轴心线与安装板101圆心线重合,激光发射方向由安装板101圆心指向外部,形成一个360
°
的环状激光发射器。
[0029]
其中,测角载体4一表面与锥镜201的锥底连接;安装板101一表面与agv小车3连接。
[0030]
其中,摄像头203与激光管102之间相互配合;无线通信装置103与图像及无线通信处理器204之间电性连接。
[0031]
实施例1:
[0032]
请参阅图2所示,本实施例为一种应用室内外agv小车的激光定位装置的激光测角装置2的组装方法和工作原理:
[0033]
首先将锥镜201水平放置,锥顶朝上,锥底朝下并与测角载体4固定连接;而后在锥镜201正上方固定安装一摄像头203,摄像头203为300万像素的普通摄像头,内部安装808nm的滤光片,只能接受808nm的激光信号;摄像头203镜头朝下,锥镜201与摄像头203的轴心线重合;图像及无线通信处理器204负责接收/发射指令和处理图像,可通过导线与摄像头203电性连接;在锥镜201外圈,垂直安装隔离板202,隔离板202为长方形薄钢片,厚度为0.1mm左右,长*宽=50cm*10cm,360各隔离板202每隔1
°
,并沿锥镜201中心点放射方向垂直安装于锥镜201外圈;
[0034]
实施例2:
[0035]
请参阅图4所示,本实施例为一种应用室内外agv小车的激光定位装置的测角方法:
[0036]
激光发射装置1水平安装在agv小车3顶端,在室外场地安装若干立柱,作为测角载体4,并在每个立柱上安装一个激光测角装置2,当agv小车3需要定位时,发射出一个指令,激光发射装置1发出一个环状脉冲激光;立柱上所有激光测角装置2都可以接收到激光,摄像头203进行图片抓取,通过图像处理器可以求出ab值,已知摄像头焦距bf值,可以通过公式tgc=ab/bf计算出激光来的方向入射角度c;由于每个立柱坐标位置是已知的(在图4中为摄像头203激光入射点f),形成立柱到agv小车3的直线方程ea,同样可以计算出eu、ev、ew等不同直线方程,取其中二个求出它们交点就是e的坐标。
[0037]
以上公开的本实用新型优选实施例只是用于帮助阐述本实用新型。优选实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本实用新型的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本实用新型。本实用新型仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1