一种定位ADAS标定标靶位置的装置的制作方法
一种定位adas标定标靶位置的装置
技术领域
1.本实用新型属于标定标靶定位技术领域,特别涉及一种定位adas 标定标靶位置的装置。
背景技术:
2.目前车辆adas标定主要为动态标定法,即路试过程中进行标定,在进行动态标定标靶的过程中,对标定标靶与车辆行驶轴线之间的位置及角度要求较高,车辆行驶过程中轴线难以捕捉,且标定标靶过程中能耗高、效率低。
技术实现要素:
3.本实用新型的目的是克服现有技术中的不足,提供一种定位adas 标定标靶位置的装置,由于车辆处于静止状态,大大降低了标定标靶过程中的能量损耗,并且车辆静止工作人员能够更加快速找到车辆的轴线,提高标定标靶的效率。
4.为了实现上述目的,本实用新型采用的技术方案是:
5.一种定位adas标定标靶位置的装置,包括机架、汽车和控制柜,在机架上安装有第一传动机构、第二传动机构、第三传动机构以及滑轨,所述第一传动机构安装在机架的一侧,滑轨安装在机架的另一侧,所述第二传动机构和第三传动机构的一端安装在第一传动机构上、另一端安装在滑轨上,并与滑轨滑动连接,在第二传动机构上安装有摄像头标定标靶,所述第三传动机构上安装有雷达标定标靶,在机架的一侧的地面上安装有刻度尺支架,所述刻度尺支架上安装有刻度尺,在刻度尺支架的一侧地面上设有停车线,所述汽车的前轮压在停车线上,在汽车上安装有摄像头与雷达,在汽车的轮毂上安装有卡爪,在卡抓上安装有激光测距仪,所述控制柜安装在地面上汽车的一侧。
6.优选的,所述第一传动机构包括第一保护罩、第一螺纹杆和第一驱动电机,所述第一保护罩固定安装在机架上,所述第一螺纹杆安装在第一保护罩的内部,且第一螺纹杆的一端与第一保护罩的一侧壁转动连接,另一端贯穿第一保护罩的另一侧壁与第一驱动电机相连接,方便对第二传动机构和第三传动机构调节,保证标定的准确性。
7.优选的,所述第二传动机构和第三传动机构为相同的结构,第二传动机构包括第二驱动电机、第二保护罩、第二螺纹杆以及第一套筒,所述第一套筒套在第一螺纹杆上,且第二螺纹杆的一端贯穿第二保护罩与第一套筒转动连接、另一端贯穿第二保护罩的另一侧壁与第二驱动电机相连接,在第二保护罩的一端上开有滑槽,所述滑槽与所述滑轨相配合,第二传动机构用于调节摄像头标定标靶,第三传动机构用于调节雷达标定标靶,提高了该装置的灵活性,从而保证标定的准确。
8.优选的,所述摄像头标定标靶包括支撑杆、第二套筒、第一旋转电机以及第一标定标靶,所述支撑杆的顶部安装在第二套筒上,所述第二套筒安装在第二传动机构上的第二螺纹杆上,所述第一旋转电机安装在支撑杆的上,并且旋转电机的输出轴与所述第一标定标靶相连接,用于为汽车进行标定,保证了标定的准确。
9.优选的,所述雷达标定标靶包括第二标定标靶、第三驱动电机、第二旋转电机、第三套筒、第四套筒、第三保护罩以及第三螺纹杆,所述第三套筒安装在第三传动机构上的第二螺纹杆上,所述第三螺纹杆的一端安装在第三保护罩一端的内壁上、另一端贯穿第三保护罩的另一侧壁以及第三套筒与第三驱动电机相连接,所述第四套筒套在第三螺纹杆上,所述第二旋转电机安装在第四套筒上,所述第二标定标靶安装在第二旋转电机的输出轴上,用于为汽车进行标定标靶,保证了标定的准确。
10.优选的,所述刻度尺支架设有两个,两个对称安装在机架的两侧,所述刻度尺设有两个,两个刻度尺与两个刻度尺支架一一对应,刻度尺支架用于支撑刻度尺,保证了刻度尺测量的准确性,从而保证标定更加的准确。
11.优选的,所述卡爪设有两个,两个卡爪安装在对应的两个轮毂上,所述激光测距仪设有两个,两个激光测距仪与两个卡爪一一对应,卡爪能够将激光测距仪固定,保证了激光测距仪的稳定,保证激光测距仪测出的结果更加的准确。
12.本实用新型的有益效果是:
13.1)本装置由于车辆处于静止状态,大大降低了标定标靶过程中的能量损耗,并且车辆静止工作人员能够更加快速找到车辆的轴线,提高标定标靶的效率。
14.2)本装置第一传动机构包括第一保护罩、第一螺纹杆和第一驱动电机,所述第一保护罩固定安装在机架上,所述第一螺纹杆安装在第一保护罩的内部,且第一螺纹杆的一端与第一保护罩的一侧壁转动连接,另一端贯穿第一保护罩的另一侧壁与第一驱动电机相连接,方便对第二传动机构和第三传动机构调节,保证标定的准确性。
15.3)本装置第二传动机构和第三传动机构为相同的结构,第二传动机构包括第二驱动电机、第二保护罩、第二螺纹杆以及第一套筒,所述第一套筒套在第一螺纹杆上,且第二螺纹杆的一端贯穿第二保护罩与第一套筒转动连接、另一端贯穿第二保护罩的另一侧壁与第二驱动电机相连接,在第二保护罩的一端上开有滑槽,所述滑槽与所述滑轨相配合,第二传动机构用于调节摄像头标定标靶,第三传动机构用于调节雷达标定标靶,提高了该装置的灵活性,从而保证标定的准确。
16.4)本装置摄像头标定标靶包括支撑杆、第二套筒、第一旋转电机以及第一标定标靶,所述支撑杆的顶部安装在第二套筒上,所述第二套筒安装在第二传动机构上的第二螺纹杆上,所述第一旋转电机安装在支撑杆的上,并且旋转电机的输出轴与所述第一标定标靶相连接,用于为汽车进行标定标靶,保证了标定的准确。
17.5)本装置雷达标定标靶包括第二标定标靶、第三驱动电机、第二旋转电机、第三套筒、第四套筒、第三保护罩以及第三螺纹杆,所述第三套筒安装在第三传动机构上的第二螺纹杆上,所述第三螺纹杆的一端安装在第三保护罩一端的内壁上、另一端贯穿第三保护罩的另一侧壁以及第三套筒与第三驱动电机相连接,所述第四套筒套在第三螺纹杆上,所述第二旋转电机安装在第四套筒上,所述第二标定标靶安装在第二旋转电机的输出轴上,用于为汽车进行标定,保证了标定的准确。
18.6)本装置刻度尺支架设有两个,两个对称安装在机架的两侧,所述刻度尺设有两个,两个刻度尺与两个刻度尺支架一一对应,刻度尺支架用于支撑刻度尺,保证了刻度尺测量的准确性,从而保证标定更加的准确。
19.7)本装置卡爪设有两个,两个卡爪安装在对应的两个轮毂上,所述激光测距仪设
有两个,两个激光测距仪与两个卡爪一一对应,卡爪能够将激光测距仪固定,保证了激光测距仪的稳定,保证激光测距仪测出的结果更加的准确。
附图说明
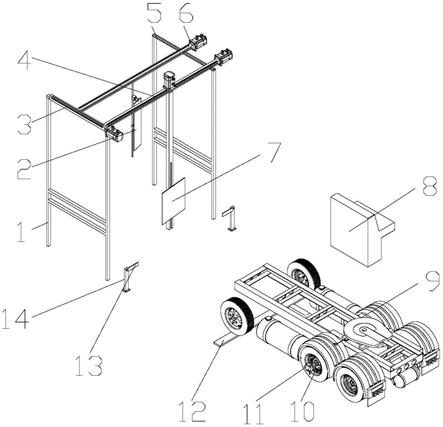
20.附图1是本实用新型的结构示意图。
21.附图2是本实用新型中摄像头标定标靶的结构示意图。
22.附图3是本实用新型中第一传动机构的结构示意图。
23.附图4是本实用新型中第二传动机构的结构示意图。
24.附图5是本实用新型中雷达标定标靶的爆炸图。
25.附图6是本实用新型中空间坐标系示意图。
26.附图7是本实用新型算法的说明图。
27.图中:1、机架;2、摄像头标定标靶;201、第二套筒;202、第一标定标靶;203、第一旋转电机;204、支撑杆;3、第一传动机构;301、第一驱动电机;302、第一螺纹杆;303、第一保护罩;4、第三传动机构;5、滑轨;6、第二传动机构;601、第二驱动电机;602、第二保护罩;603、第一套筒;604、第二螺纹杆;7、雷达标定标靶; 701、第三驱动电机;702、第三套筒;703、第三保护罩;704、第三螺纹杆;705、第二旋转电机;706、第二标定标靶;707、第四套筒; 8、控制柜;9、汽车;10、卡爪;11、激光测距仪;12、停车线;13、刻度尺;14、刻度尺支架。
具体实施方式
28.下面结合附图1
‑
7,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.在本实用新型的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
30.一种定位adas标定标靶位置的装置,包括机架1、汽车9和控制柜8,在机架1上安装有第一传动机构3、第二传动机构6、第三传动机构4以及滑轨5,所述第一传动机构3安装在机架1的一侧,滑轨5安装在机架1的另一侧,所述第二传动机构6和第三传动机构 4的一端安装在第一传动机构3上、另一端安装在滑轨5上,并与滑轨5滑动连接,在第二传动机构6上安装有摄像头标定标靶2,所述第三传动机构4上安装有雷达标定标靶7,在机架1的一侧的地面上安装有刻度尺支架14,所述刻度尺支架14上安装有刻度尺13,在刻度尺支架14的一侧地面上设有停车线12,所述汽车9的前轮压在停车线12上,在汽车9上安装有摄像头与雷达,在汽车9的轮毂上安装有卡爪10,在卡抓上安装有激光测距仪11,所述控制柜8安装在地面上汽车9的一侧;本装置由于车辆处于静止状态,大大降低了标定标靶过程中的能量损耗,并且车辆静止工作人员能够更加快速找到车辆的轴线,提高标定标靶的效率。
31.其中,摄像头与雷达在图中未标出,摄像头与雷达根据需要安装在汽车9的不同位
置上。
32.所述第一传动机构3包括第一保护罩303、第一螺纹杆302和第一驱动电机301,所述第一保护罩303固定安装在机架1上,所述第一螺纹杆302安装在第一保护罩303的内部,且第一螺纹杆302的一端与第一保护罩303的一侧壁转动连接,另一端贯穿第一保护罩303 的另一侧壁与第一驱动电机301相连接,方便对第二传动机构6和第三传动机构4调节,保证标定的准确性。
33.所述第二传动机构6和第三传动机构4为相同的结构,第二传动机构6包括第二驱动电机601、第二保护罩602、第二螺纹杆604以及第一套筒603,所述第一套筒603套在第一螺纹杆302上,且第二螺纹杆604的一端贯穿第二保护罩602与第一套筒603转动连接、另一端贯穿第二保护罩602的另一侧壁与第二驱动电机601相连接,在第二保护罩602的一端上开有滑槽,所述滑槽与所述滑轨5相配合,第二传动机构6用于调节摄像头标定标靶2,第三传动机构4用于调节雷达标定标靶7,提高了该装置的灵活性,从而保证标定的准确。
34.所述摄像头标定标靶2包括支撑杆204、第二套筒201、第一旋转电机203以及第一标定标靶202,所述支撑杆204的顶部安装在第二套筒201上,所述第二套筒201安装在第二传动机构6上的第二螺纹杆604上,所述第一旋转电机203安装在支撑杆204的上,并且旋转电机的输出轴与所述第一标定标靶202相连接,用于为汽车9进行标定标靶,保证了标定的准确。
35.所述雷达标定标靶7包括第二标定标靶706、第三驱动电机701、第二旋转电机705、第三套筒702、第四套筒707、第三保护罩703 以及第三螺纹杆704,所述第三套筒702安装在第三传动机构4上的第二螺纹杆604上,所述第三螺纹杆704的一端安装在第三保护罩 703一端的内壁上、另一端贯穿第三保护罩703的另一侧壁以及第三套筒702与第三驱动电机701相连接,所述第四套筒707套在第三螺纹杆704上,所述第二旋转电机705安装在第四套筒707上,所述第二标定标靶706安装在第二旋转电机705的输出轴上,用于为汽车9 进行标定,保证了标定的准确。
36.所述刻度尺支架14设有两个,两个对称安装在机架1的两侧,所述刻度尺13设有两个,两个刻度尺13与两个刻度尺支架14一一对应,刻度尺支架14用于支撑刻度尺13,保证了刻度尺13测量的准确性,从而保证标定更加的准确。
37.所述卡爪10设有两个,两个卡爪10安装在对应的两个轮毂上,所述激光测距仪11设有两个,两个激光测距仪11与两个卡爪10一一对应,卡爪10能够将激光测距仪11固定,保证了激光测距仪11 的稳定,保证激光测距仪11测出的结果更加的准确。
38.该装置对汽车9进行标定标靶的过程以及计算方法为:
39.1)车辆直线行驶进入雷达及摄像头标定工位;地面设置停车线 12,驾驶员通过观察前轮与停车线12位置停止车辆,保证雷达与雷达标定标靶7间距为1.2m~2m;
40.2)在控制柜8输入车辆信息,车辆的雷达与摄像头安装高度、轴距、驱动轴中轴线与雷达、车轴与摄像头距离便可写入算法中;
41.3)将卡爪10和激光测距仪11安装车辆轮毂上,打开激光测距仪11;
42.4)刻度尺13接收激光,调整激光测距仪11使两端激光线束照射点处在同一水平面,读取测量的距离数值,并记录照射点在刻度尺 13的刻度值,通过建立的空间坐标系,能够确定照射点的坐标值;
43.5)在控制柜8输入数值,后台算法计算摄像头标定标靶2或雷达标定标靶7由初始位置(x1,y1)移动到的位置坐标点(x2,y2)及旋转角β;
44.①
计算标定标靶旋转角β:
45.当l1=l2时,车辆行驶轴线垂直于x坐标轴,β=α=0
°
;
46.当l1≠l2时,根据三角几何关系可得:
47.β=α=θ=arctan(|l1‑
l2|/d)
48.②
计算标定标靶需移动到位置坐标点(x2,y2):
49.当l1=l2时,x2=x
a
+(x
b
-x
a
)/2
50.y2=(l1-d2)-d151.(其中,d1:adas标定要求的雷达与雷达标定标靶7、摄像头与摄像头标定标靶2间距;d2:雷达、摄像头与驱动轴中轴线的距离);
52.当l1≠l2时,
53.x2=(x
a
+y
a
tanθ)+[(x
b
+y
b
tanθ)-(x
a
+y
a
tanθ)]/2,
[0054]
y2=(|l1‑
l2|/2-d2)-d1[0055]
(其中,d1:adas标定要求的雷达与雷达标定标靶7、摄像头与摄像头标定标靶2间距;d2:雷达、摄像头与驱动轴中轴线的距离);
[0056]
6)其中一个第二传动机构6在x坐标轴方向传动雷达标定标靶7 至x2位置;根据车辆雷达安装高度,雷达标定标靶7上的第三驱动电机701沿z坐标轴方向传动雷达标定标靶7,使第二标定标靶706中心与雷达中心偏移量满足≤0.05m的要求;第二旋转电机705根据算法计算的角度β旋转雷达标定标靶7,使其与汽车9行驶轴线夹角满足≤0.2
°
的要求;进行雷达标定,雷达标定后雷达标定标靶7复位;
[0057]
7)另一个第二传动机构6在x坐标轴方向传动摄像头标定标靶 2至摄像头标定标靶2的竖直中心线与车辆行驶轴线相交位置;通过算法计算摄像头与摄像头标定标靶2的间距,第一传动机构3在y坐标轴方向传动摄像头标定标靶2,保证摄像头与摄像头标定标靶2间距满足1.70
±
0.05m的要求;第一旋转电机204根据算法计算的角度β旋转第一标定标靶203满足第一标定标靶203与汽车9行驶轴线夹角满足≤5
°
的要求,进行近靶标定;
[0058]
8)近距离位置标定完成后,同样由第一传动机构3、另一个第二传动机构6、第一旋转电机204调节摄像头标定标靶2,使得摄像头与摄像头标定标靶2间距满足2.70
±
0.05m的要求;摄像头标定标靶 2与汽车9行驶轴线夹角满足≤5
°
的要求,进行远靶标定,标定完成后摄像头标定标靶2复位。
[0059]
以上内容仅仅是对本实用新型的结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本实用新型的结构或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1