一种基于图像智能识别的皮带清洁监控装置的制作方法
1.本实用新型涉及煤矿运输技术, 尤其涉及一种基于图像智能识别的皮带清洁监控装置。
背景技术:
2.皮带机,又称带式输送机, 是煤矿主要运输设备之一, 在煤矿应用非常广泛,其担负着采掘工作中大部分煤炭或矸石的运输任务。在现有技术中,皮带机很多故障是因为皮带跑偏、打滑,追其根本原因大多是皮带表面物料残留,所以急需一种可以清理皮带表面物料残留的装置。
技术实现要素:
3.针对上述技术问题,本实用新型提供一种基于图像智能识别的皮带清洁监控装置,包括皮带机、支撑架、rfid定位标签、输送带接头定位读卡器、矿用本安型激光除尘摄像仪、速度传感器、清洁装置、除尘装置。
4.所述的皮带机固定安装在地面,所述的支撑架固定安装在皮带机上,所述的rfid定位标签固定安装在皮带机的皮带上,所述的输送带接头定位读卡器固定安装在支撑架上,所述的矿用本安型激光除尘摄像仪固定安装在支撑架上,所述的速度传感器固定安装在支撑架上,所述的清洁装置固定安装在皮带机上,所述的除尘装置固定安装在皮带机上。
5.所述的清洁装置包括:丝杠电机、丝杠导轨、横移丝杠、丝杠滑块、支撑板、清洁电机支架、清洁电机、第一连杆、第二连杆、滚珠固定板、滚珠、丝杠螺母、丝杠、刷头座、弹簧、刷头,丝杠电机固定安装在皮带机上,丝杠导轨固定安装在皮带机上,横移丝杠和丝杠导轨转动安装,横移丝杠和丝杠电机的输出轴固定安装,丝杠滑块和横移丝杠螺纹安装,丝杠滑块在丝杠导轨上滑动安装,支撑板固定安装在丝杠滑块上,清洁电机支架固定安装在丝杠滑块上,清洁电机固定安装在清洁电机支架上,清洁电机的输出轴和第一连杆固定安装,第一连杆和第二连杆转动安装,第二连杆和滚珠固定板固定安装,滚珠固定板和滚珠转动安装,滚珠和第二连杆转动安装,滚珠和丝杠固定安装,丝杠螺母和丝杠螺纹安装,丝杠螺母和支撑板固定安装,丝杠和刷头座固定安装,弹簧的一端和刷头座固定安装,弹簧的另一端和刷头固定安装;
6.所述的除尘装置包括:升降电机、第三连杆、第四连杆、连杆固定板、刮泥板固定板、轨道、刮泥板,升降电机固定安装在皮带机上,升降电机的输出轴和第三连杆固定安装,第三连杆和第四连杆转动安装,第四连杆和连杆固定板转动安装,连杆固定板和刮泥板固定板固定安装,刮泥板固定板和刮泥板固定安装,刮泥板固定板和轨道滑动安装,轨道固定安装在皮带机上。
7.进一步的,所述的清洁电机和底座固定安装,清洁电机的底座固定安装在清洁电机支架上。
8.进一步的,所述的升降电机和底座固定安装,升降电机的底座固定安装在皮带机
上。
9.进一步的,所述的滚珠为不完全球体。
10.进一步的,所述的第二连杆的一端有半圆形凹槽,凹槽的大小和滚珠相匹配。
11.进一步的,所述的第二连杆和滚珠固定板由螺栓固定连接。
12.进一步的,所述的滚珠固定板的一端圆孔的直径和第二连杆凹槽的直径相等,滚珠固定板另一端的直径小于第二连杆凹槽的直径,滚珠固定板内部轮廓和滚珠相匹配。
13.进一步的,所述的刮泥板固定板的两端有t型滑块,该t型滑块与轨道形成滑动配合。
14.进一步的,所述的输送带接头定位读卡器固定安装在传输皮带中心点位置下方,rfid定位标签与输送带接头定位读卡器的位置相对应。
15.本实用新型与现有技术相比的有益效果是:(1)本实用新型能够实现对于皮带上残留异物的精准定位;(2)本实用新型能将清洁装置移动到指定位置上;(3)本实用新型安全性高,操作简单;(4)本实用新型自动化程度高,可以减轻人工的劳动强度。
附图说明
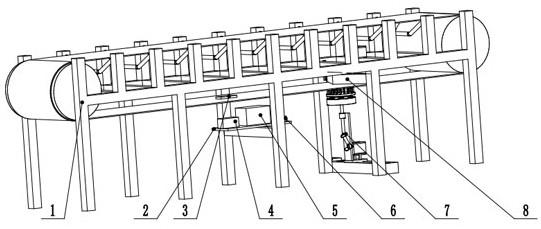
16.图1为本实用新型整体结构示意图。
17.图2为本实用新型整体结构细部示意图。
18.图3为本实用新型清洁装置示意图。
19.图4为本实用新型除尘装置示意图。
20.附图标号:1
‑
皮带机;2
‑
支撑架;3
‑
rfid定位标签;4
‑
输送带接头定位读卡器;5
‑
矿用本安型激光除尘摄像仪;6
‑
速度传感器;7
‑
清洁装置;8
‑
除尘装置;701
‑
丝杠电机;702
‑
丝杠导轨;703
‑
横移丝杠;704
‑
丝杠滑块;705
‑
支撑板;706
‑
清洁电机支架;707
‑
清洁电机;708
‑
第一连杆;709
‑
第二连杆;710
‑
滚珠固定板;711
‑
滚珠;712
‑
丝杠螺母;713
‑
丝杠;714
‑
刷头座;715
‑
弹簧;716
‑
刷头;801
‑
升降电机;802
‑
第三连杆;803
‑
第四连杆;804
‑
连杆固定板;805
‑
刮泥板固定板;806
‑
轨道;807
‑
刮泥板。
具体实施方式
21.下面结合具体实施例对本实用新型作进一步描述,在此实用新型的示意性实施例以及说明用来解释本实用新型,但并不作为对本实用新型的限定。
22.实施例:如图1、图2、图3、图4所示的一种基于图像智能识别的皮带清洁监控装置,皮带机1固定安装在地面,支撑架2固定安装在皮带机1上,rfid定位标签3固定安装在皮带机1的皮带上,输送带接头定位读卡器4固定安装在支撑架2上,矿用本安型激光除尘摄像仪5固定安装在支撑架2上,速度传感器6固定安装在支撑架2上,清洁装置7固定安装在皮带机1上,除尘装置8固定安装在皮带机1上。当矿用本安型激光除尘摄像仪5检测到皮带机1的皮带上沾有异物时,通过速度传感器6对皮带运转的持续监测,rfid定位标签3和输送带接头定位读卡器4之间的数据交互,可以快速定位异物位置。
23.清洁装置7的具体结构如图3所示,丝杠电机701固定安装在皮带机1上,丝杠导轨702固定安装在皮带机1上,横移丝杠703和丝杠导轨702转动安装,横移丝杠703和丝杠电机701的输出轴固定安装,丝杠滑块704和横移丝杠703螺纹安装,丝杠滑块704在丝杠导轨702
上滑动安装,支撑板705固定安装在丝杠滑块704上,清洁电机支架706固定安装在丝杠滑块704上,清洁电机707固定安装在清洁电机支架706上,清洁电机707的输出轴和第一连杆708固定安装,第一连杆708和第二连杆709转动安装,第二连杆709和滚珠固定板710固定安装,滚珠固定板710和滚珠711转动安装,滚珠711和第二连杆709转动安装,滚珠711和丝杠713固定安装,丝杠螺母712和丝杠713螺纹安装,丝杠螺母712和支撑板705固定安装,丝杠713和刷头座714固定安装,弹簧715的一端和刷头座714固定安装,弹簧715的另一端和刷头716固定安装。启动丝杠电机701,丝杠电机701驱动横移丝杠703转动,使丝杠滑块704在丝杠导轨702上直线往复运动,启动清洁电机707,清洁电机707驱动第一连杆708转动,第一连杆708带动第二连杆709上下运动,在丝杠螺母712的作用下,第二连杆709带动滚珠711和固定在滚珠711上的丝杠713同时上下运动和转动,刷头座714、弹簧715、刷头716也同时转动,从而将皮带上的异物进行清理。
24.除尘装置8的具体结构如图4所示,升降电机801固定安装在皮带机1上,升降电机801的输出轴和第三连杆802固定安装,第三连杆802和第四连杆803转动安装,第四连杆803和连杆固定板804转动安装,连杆固定板804和刮泥板固定板805固定安装,刮泥板固定板805和刮泥板807固定安装,刮泥板固定板805和轨道806滑动安装,轨道806固定安装在皮带机1上。启动升降电机801,升降电机801驱动第三连杆802转动,第三连杆802带动第四连杆803上下运动,第四连杆803带动刮泥板固定板805的两端在轨道806的t型槽内上下滑动,刮泥板固定板805带动刮泥板807上下运动,通过调整刮泥板807的位置,可以将皮带机1的皮带上的尘土刮掉。
25.本实用新型的工作原理包括以下步骤:步骤一:通过在传输皮带中心点位置下方安装输送带接头定位读卡器4,并在对应位置的皮带上安装相应的rfid定位标签3,将此处定义为皮带“零点”,通过速度传感器6对皮带的运转状态进行持续监测,当通过矿用本安型激光除尘摄像仪5发现皮带有异物时,能够实现对皮带异物的具体定位;
26.步骤二:启动丝杠电机701,丝杠电机701驱动第一连杆708转动,第一连杆708带动刷头716上下运动并转动,从而清理皮带机1的皮带上的异物;
27.步骤三:启动升降电机801,升降电机801驱动第三连杆802转动,第三连杆802带动刮泥板807上下运动,调整刮泥板807的位置,从而将皮带机1的皮带上的尘土刮掉,当不需要使用时,将刮泥板807移动至最上方即可。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1