一种可模拟一阶和二阶模态海洋内孤立波的实验装置
1.本实用新型公开了一种可模拟一阶和二阶模态海洋内波的实验装置,尤其是涉及密度分层透明水槽中产生二阶模态内孤立波的装置,特别适用于长度较长的大型透明水槽内模拟具有一定跃层厚度的密度分层海洋中的二阶模态内孤立波。
背景技术:
2.海洋中由于水温和盐度的差异,使得海水密度在各深度层的分布不同,在淡水与盐水之间的界面易被扰动而产生内波。内波的恢复力极其微弱,约为表面波的0.1%,目前观测到的内波波幅达百多米量级,其不仅对海洋生态调节起到了重要作用,而且对海洋工程结构物以及水下航行器安全产生不可忽视的影响。因此通过实验室模拟内孤立波的生成演化及其与结构物作用,具有重要意义。
3.目前用于产生内孤立波的实验装置大致分为两类:
4.一是通过机械装置扰动密度分层界面来残剩内孤立波,如摇板式造波方法,其不仅对流体的密度分层要求较高,且控制生成内孤立波基本要素的结构较为复杂;
5.二是通过构建重力势阱的方式,自发产生内孤立波,如提升闸门式、卷帘门式、槽拉门式以及百叶门式等,其中百叶门式造波装置具有对水体扰动小,操作安全便利以及产生的内孤立波质量较高等优点。
6.但以上两类造波装置仅限于制造一阶模态内孤立波,均无法制造二阶模态内孤立波,对于实验室研究内孤立波而言存在不足。
技术实现要素:
7.本实用新型目的是:为克服在大型分层流试验透明水槽中制造二阶模态内孤立波工序繁琐、重复性差以及造波质量不易控制等不足,同时遵循结构简洁、操作安全便利的原则,本实用新型提出一种新型复合式一阶、二阶模态内孤立波造波装置。这种造波装置在旋转百叶门重力式内孤立波造波装置基础上,对百叶门结构进行改进,使其可构建一阶和二阶模态内孤立波所需的方势阱。该复合式内孤立波造波装置同时也继承了旋转百叶门重力式内孤立波造波装置对水体扰动小,操作安全便利的优点。
8.本实用新型解决其技术问题所采用的技术方案是:
9.一种可模拟一阶和二阶模态海洋内孤立波的实验装置,包括:
10.透明水槽,其内装有液体,透明水槽上端边缘沿透明水槽长度方向设有直线导轨;
11.纵移驱动机构,用于驱动百叶门与百叶门联动控制机构沿透明水槽上所述直线导轨运动;
12.百叶门联动机构,安装在所述直线导轨上,包括百叶门和带动百叶门联动的百叶门联动控制机构,所述百叶门由若干细长薄型叶片组成,所述叶片可以在所述联动控制机构的控制下同步瞬间旋转开启和闭合,全部叶片构成的“隔门”采用重叠方式排列,闭合时重叠部分具有密封性,多个叶片底部与一底板之间可转动的连接;
13.所述百叶门联动控制机构包括:
14.联动控制箱,安装在所述直线导轨上,联动控制箱内设置联杆滑块、滑动导轨、气缸和气泵,其中,每块叶片通过所述联动块与对应联动块的联杆滑块的一端相接,所有联杆滑块均绕对应的联动块旋转,所有联杆滑块的另一端与气缸活塞杆连接,联杆滑块在滑动导轨上做往复运动,气缸活塞带动活塞杆作往复运动时,带动联杆滑块运动,进而带动叶片的联动块同时旋转90度;
15.单个所述叶片包括:
16.叶片本体、第一连杆、第二连杆和联动块,其中,所述叶片本体的上端与所述第一连杆的底端刚性连接,第一连杆的上端与所述联动块之间滑动连接,所述联动块的上端与所述联动控制机构之间以插销方式相连;
17.所述叶片本体的底部设有中空竖腔含有内螺纹,所述底板上设有圆形凹槽;
18.所述第二连杆包括位于上端的竖杆和连接在所述竖杆底端的圆盘,所述圆盘与所述底板中的圆形凹槽活动连接,第二连杆的竖杆含有外螺纹与叶片本体底部的中空竖腔螺纹连接;
19.提升机构,用于带动整个百叶门沿透明水槽高度方向上、下移动。
20.所述联动块的一端设有沿联动块轴向开设的滑槽,所述第一连杆上端伸入所述滑槽内,且通过滚珠与所述滑槽内壁之间实现滑动连接。
21.所述提升机构包括设置在百叶门联动机构中左、右两端的两个直径相等的轴辊,每个轴辊的两端分别通过钢丝绳与所述底板连接,一个轴辊转动即可实现底板两端4根钢丝绳的同步升降。
22.所述底板上设有用于连接钢丝绳的吊钩。
23.所述纵移驱动机构包括滚珠丝杆和两台蜗轮蜗杆减速器,其中,两台蜗轮蜗杆减速器串行连接,滚珠丝杆上的螺母移动副与所述联动控制箱固定连接,联动控制箱的向前和向后运动由方向摇柄或步进电机驱动蜗轮蜗杆完成。
24.本实用新型的有益效果是:
25.本实用新型复合式一阶、二阶模态模态内孤立波造波装置是适用于分层流透明水槽中的实验设备,在利用重力塌陷原理产生内孤立波的造波机构中首次实现可产生二阶模态内孤立波的装置,采用闭合百叶门及上下移动百叶门控制上、下水流通道开闭及沿透明水槽纵向移动调节水体方式实现构造一阶及二阶模态内孤立波落差条件,百叶门的同步快速开闭通过联动控制系统实现,复合式一阶、二阶模态内孤立波造波装置安装在透明水槽边缘导轨上,通过电机及相应的减速结构控制造波机主体沿透明水槽纵向的移动。
26.通过左右及上下移动闭合百叶门,来构建一阶及二阶模态内孤立波所需的势阱结构。实现了造波机可通过重力势阱产生一阶或二阶模态内孤立波。
27.装置对水体扰动较小,使得产生的内孤立波质量较高,同时整个装置结构简洁操作简单,安全性得到有效提高。
附图说明
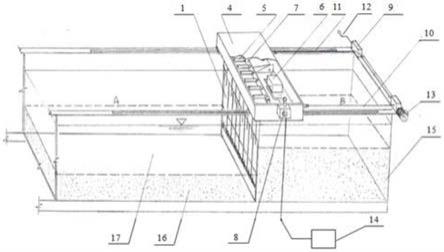
28.图1是本实用新型可模拟一阶和二阶模态海洋内孤立波的实验装置的结构示意图;
29.图2是本实用新型单个所述叶片的结构示意图;
30.图3是图1中第一连杆与联动块之间的连接结构放大图;
31.图4是图1中底板、第二连杆以及叶片本体之间连接结构示意图;
32.图5是百叶门提升机构结构示意图;
33.图6是图5的侧视图;
34.图7是本实用新型一阶模态内孤立波的侧视图。
35.图8是本实用新型二阶模态内孤立波的侧视图。
36.图中,1.百叶门,2.底板,4.联动控制箱,5.联杆滑块,6.气缸活塞,7.滑动导轨,8.换向阀,9.蜗轮蜗杆减速器,10.滚珠丝杆,11.直线导轨,12.方向摇柄,13.步进电机,14.气泵,15.透明水槽,16.盐水层,17.清水层,18.第一钢丝绳,19.第二钢丝绳,20.轴辊,21.吊钩,1
‑
1.联动块,1
‑
2.第一连杆,1
‑
3.叶片本体,1
‑
4.第二连杆,1
‑
5.滚珠。
具体实施方式
37.如图1~图8所示,本实用新型一种可模拟一阶和二阶模态海洋内孤立波的实验装置,包括:
38.透明水槽15,其内装有液体,透明水槽15上端两侧沿透明水槽长度方向设有直线导轨11;
39.百叶门联动机构,安装在所述直线导轨11上,包括百叶门1和带动百叶门联动的百叶门联动控制机构,所述百叶门1由若干细长薄型叶片组成,所述叶片可以在联动控制机构的控制下同步瞬间旋转开启和闭合,全部叶片构成的“隔门”采用重叠方式排列,闭合时重叠部分具有良好的密封性,多个叶片底部与一底板2之间可转动的连接;
40.纵移驱动机构,用于驱动百叶门与百叶门联动控制机构沿透明水槽上所述直线导轨11运动;
41.单个所述叶片包括:
42.叶片本体1
‑
3、第一连杆1
‑
2、第二连杆1
‑
4和联动块1
‑
1,其中,所述叶片本体1
‑
3的上端与所述第一连杆1
‑
2的底端刚性连接,第一连杆1
‑
2的上端与所述联动块1
‑
1之间滑动连接,所述联动块1
‑
1的上端与所述联动控制机构之间以插销方式相连;
43.所述叶片本体的底部设有中空竖腔含有内螺纹,所述底板上设有圆形凹槽;
44.所述第二连杆1
‑
4为一t形杆结构,t形杆结构的横杆与所述底板中的圆形凹槽连接,t形杆结构的竖杆含有外螺纹与叶片本体底部的中空竖腔螺纹连接;
45.提升机构,用于带动整个百叶门沿透明水槽高度方向上、下移动。
46.进一步的,所述提升机构包括设置在百叶门联动机构中左、右两端的两个直径相等的轴辊20,每个轴辊20的两端分别通过钢丝绳与所述底板2连接,一个轴辊转动即可实现底板2两端4根钢丝绳的同步升降。
47.进一步的,所述底板2上设有用于连接钢丝绳的吊钩21。
48.如图3所示,所述联动块1
‑
1的一端设有沿联动块轴向开设的滑槽,所述第一连杆1
‑
2上端伸入所述滑槽内,且通过滚珠1
‑
5与所述滑槽内壁之间实现滑动连接。
49.进一步的,所述百叶门联动控制机构包括:
50.联动控制箱4,安装在所述直线导轨11上,联动控制箱4内设置联杆滑块、滑动导
轨、气缸和气泵,其中,每块叶片通过所述联动块1
‑
1与对应联动块的联杆滑块的一端相接,所有联杆滑块的另一端与气缸活塞杆连接,联杆滑块在滑动导轨上做往复运动,气缸活塞带动活塞杆作往复运动时,带动联杆滑块运动,进而带动叶片的联动块1
‑
1同时旋转90度。
51.进一步的,所述纵移驱动机构包括滚珠丝杆和两台蜗轮蜗杆减速器9,其中,两台蜗轮蜗杆减速器9串行连接,滚珠丝杆上的螺母移动副与所述联动控制箱4固定连接,联动控制箱4的向前和向后运动由方向摇柄或步进电机驱动蜗轮蜗杆完成。
52.利用本实用新型一种可模拟一阶和二阶模态海洋内孤立波的实验装置进行一阶模态内孤立波的实验方法,首先根据需要制造的一阶模态内孤立波属性,计算出所需要的一阶模态造波机移动后造波机右侧密度分层水体中上层厚度h
′
10
即势阱深度和造波机初始位置据水槽右侧的距离l
10
即势阱宽度,然后通过方程
53.l0h
10
=h
′
10
l
10
ꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0054][0055]
l0=l
10
+x0ꢀꢀꢀꢀꢀꢀꢀꢀ
(19)
[0056][0057]
得出造波机初始位置据水槽右侧的距离l0和造波机移动距离x0,最后,实际操作造波机移动来构建方势阱,具体步骤如下:
[0058]
1)在百叶门打开的情况下将造波机移动至初始位置j0处距离水槽右侧距离为l0;
[0059]
2)启动联动控制机构将百叶门闭合,并将百叶门提起确保其上端露出水面,百叶门底部的底板与透明水槽槽底之间留有溢流通道;
[0060]
3)启动纵移驱动机构将百叶门向透明水槽右侧匀速缓慢移动距离x0至位置j1处距离水槽右侧距离为l
10
,即可构建所需方势阱;
[0061]
4)缓慢将百叶门放下,待势阱稍稍稳定后,启动控制装置将百叶门瞬间开启,方势阱在重力作用下塌陷形成所需内孤立波。
[0062]
一阶模态内孤立波的实验如图7所示,h
10
为密度分层水体中上层厚度,h
20
为密度分层水体中下层厚度,h为总深度,s为透明水槽总长度,ρ
10
为上层水体密度,ρ
20
为下层水体密度,j0为造波机初始位置,j1为造波机移动后位置,x0为造波机移动距离,l0为造波机初始位置据水槽右侧的距离,l
10
为一阶模态造波机最终位置据水槽右侧的距离即势阱宽度,为一阶模态造波机移动后造波机左侧密度分层水体中上层厚度即势阱深度,为一阶模态造波机移动后造波机左侧密度分层水体中下层厚度,h1'0为一阶模态造波机移动后造波机右侧密度分层水体中上层厚度,h'
20
一阶模态为造波机移动后造波机右侧密度分层水体中下层厚度。
[0063]
如图8所示,与一阶模态内孤立波实施步骤类似,首先根据需要制造的二阶模态内孤立波属性,计算出所需要的方势阱几何参数中的位置偏移参数t、势阱深度h”2
以及势阱宽度l2,通过方程:
[0064]
(1)造波机移动至i1位置时
[0065]
l
‑
x1=l1ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0066]
lh1=l1h
′1ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0067]
lh2=l1h'2ꢀꢀꢀꢀꢀꢀ
(3)
[0068]
h1+h2+h3=h
ꢀꢀꢀꢀ
(4)
[0069]
h
′1+h'2+h
′3=h
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0070][0071][0072][0073]
(2)造波机移动至i2位置时
[0074]
l1‑
x2=l2ꢀꢀꢀꢀꢀꢀꢀ
(9)
[0075]
l1h
′3=l2h
″3ꢀꢀꢀ
(10)
[0076]
l1h'2=l2h
″2ꢀꢀꢀꢀꢀꢀ
(11)
[0077]
h
″1+h
″2+h
″3=h
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0078][0079][0080][0081]
取方势阱中中间跃层的位置偏移参数为t,其满足方程:
[0082][0083]
得到l,x1和x2,即造波机初始位置及两次移动的位置。
[0084]
二阶模态内孤立波的实验如图8所示,i0为造波机初始位置,l为造波机初始位置距离透明水槽右侧的长度,h1为密度分层水体中上层厚度,h2为密度分层水体中中间层厚度,h3为密度分层水体中下层厚度,h为总深度,s为透明水槽总长度;ρ1为上层水体密度,ρ2为中层水体密度,ρ3为中层水体密度;i1为造波机第一步移动后位置,x1为造波机初次移动的距离,l1为造波机初次移动后位置距离透明水槽右侧的长度,为造波机初次移动后造波机左侧密度分层水体中上层厚度,为造波机初次移动后造波机左侧密度分层水体中中间层厚度,为造波机初次移动后造波机左侧密度分层水体中中间层厚度,h
′1为造波机初次移动后造波机右侧密度分层水体中上层厚度,h'2为造波机初次移动后造波机右侧密度分层水体中中间层厚度,h
′3为造波机初次移动后造波机右侧密度分层水体中下层厚度;i2为造波机第二步移动后位置,x2为造波机初次移动的距离,l2为造波机再次移动后位置距离透明水槽右侧的长度即势阱宽度,为造波机再次移动后造波机左侧密度分层水体中上层厚度,为造波机再次移动后造波机左侧密度分层水体中中间层厚度,为造波机再次移动后造波机左侧密度分层水体中中间层厚度,h
″1为造波机再次移动后造波机右侧密度分层水体中上层厚度,h
″2为造波机再次移动后造波机右侧密度分层水体中中间层厚度即势阱深度,h
″3为造波机再次移动后造波机右侧密度分层水体中下层厚度,参数t为造波机右侧中间层与造波机左侧上、下层密度分界面高度差之比即位置偏移参数,
[0085]
最后,实际操作造波机移动来构建方势阱,具体步骤如下:
[0086]
1)在百叶门打开的情况下将造波机移动至位置i0处;
[0087]
2)启动控制装置将百叶门闭合,并将百叶门提起确保其上端露出水面,百叶门底部的底板与透明水槽槽底之间留有溢流通道;
[0088]
3)启动控制装置将百叶门匀速缓慢移动距离x1至位置i1处后,并缓慢将百叶门放下,百叶门底部的底板与水槽槽底接触,关闭底部溢流通道,同时确保百叶门顶部降至水面以下,在顶部形成新的溢流通道;
[0089]
4)启动控制装置将百叶门匀速缓慢移动距离x2至位置i2处,即可构建所需方势阱;
[0090]
5)待方势阱稍稍稳定后,启动控制装置将百叶门瞬间开启,方势阱在重力作用下塌陷形成所需的二阶模态内孤立波。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1