一种车用多传感器数据采集装置的制作方法
1.本实用新型涉及无人驾驶技术领域,特别涉及一种车用多传感器数据采集装置。
背景技术:
2.无人驾驶技术的实现必须依托准确的环境感知技术,现阶段无人驾驶环境感知主要依靠毫米波雷达、激光雷达等设备,由于不同的传感器具备不同的性能,激光雷达的优势在于其探测范围更广,探测精度更高,但是,激光雷达的缺点也很明显:在雨雪雾等极端天气下极易受到干扰,探测准确性较低;而毫米波雷达具备抗干扰能力强的特点,但是其探测距离收到频段制约,同时也无法探测行人等。目前所研究的无人驾驶车辆往往同时安装毫米波雷达与激光雷达,在安装过程中没有充分考虑美观及传感器的特性,大多是分散的将两种雷达固定在车辆的不同位置,具备较强的安装随意性,并且大都暴露在车外,极大的影响车辆美观。由于激光雷达需要暴露在车外才能正常工作,但是长期的暴露环境容易受到落尘等的影响降低探测精度,需要定期的进行清洁,特别是在大雾阴雨等天气时,大量的微尘、雨水、雪等附着在激光雷达表面,即便此时激光雷达不处于工作状态,那么在下次重启工作时,也要先进行清洁工作,以降低对激光雷达的干扰。长期的暴露设置在一定程度上降低了激光雷达与毫米波雷达的使用寿命,因此,有必要提供一种车用多传感器数据采集装置,解决上述问题。
技术实现要素:
3.为解决上述技术问题,本实用新型提供一种车用多传感器数据采集装置,充分考虑不同传感器的特性,防止传感器的过分暴露,影响车辆美观。
4.本实用新型是通过以下技术方案实现的:
5.一种车用多传感器数据采集装置,包括:安装箱体,安装箱体顶部一侧固定有顶板,安装箱体顶部另一侧敞开,顶板内部设置空腔,空腔内设置滑动板,空腔内设置滑槽,使滑动板能够沿滑槽来回滑动;所述的滑动板一侧与安装箱体内的第一电动伸缩杆连接;安装箱体内部设置升降座,升降座位于安装箱体内顶部敞开一侧。安装箱体内固定有毫米波雷达,毫米波雷达位于顶板底部,升降座上安装有激光雷达。第一电动伸缩杆通过第一驱动电机控制;
6.优选的,升降座底部通过安装箱体内的第二电动伸缩杆控制升降,第二电动伸缩杆通过安装箱体内的第二驱动电机控制。
7.有益效果:本实用新型结构简单,使用方便。将激光雷达与毫米波雷达设置在同一安装箱体内形成一个整体,充分发挥毫米波雷达穿透能力强的特点,将其隐蔽设置在箱体内,既增加了车辆的美观性,又能避免长期暴露提高其使用寿命。通过升降座实现激光雷达的升降,当其工作时,通过升降控制将其完全暴露在安装箱体外,使其不受箱体干扰;当其停止工作时,可以隐藏在安装箱体内部,既能增强整体美观性,又能避免落尘等对其造成影响。安装箱体底部设置吸盘,能够将整个装置吸附在车顶,安装方便。
附图说明
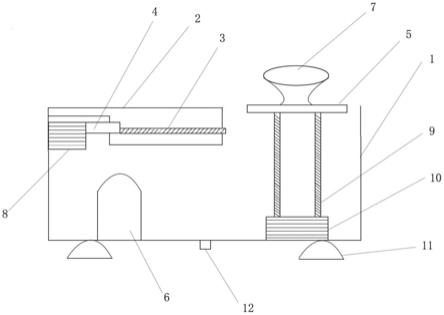
8.图1为本实用新型激光雷达工作时的结构示意图。
9.图2为本实用新型激光雷达隐蔽到安装箱体内部时的结构示意图。
[0010]1‑
安装箱体、2
‑
顶板、3
‑
滑动板、4
‑
第一电动伸缩杆、5
‑
升降座、6
‑
毫米波雷达、7
‑
激光雷达、8
‑
第一驱动电机、9
‑
第二电动伸缩杆、10
‑
第二驱动电机、11
‑
吸盘、12
‑
线束管。
具体实施方式
[0011]
以下将结合实施例对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。本技术中的“上、下、左、右”等方位名词,是以附图中的方向为准,但并不代表对本技术中装置结构的限制。
[0012]
一种车用多传感器数据采集装置,包括:安装箱体1,所述的安装箱体1顶部一侧固定有顶板2,安装箱体1顶部另一侧敞开,所述的顶板2内部设置空腔,空腔内设置滑动板3,空腔内设置滑槽,使滑动板3能够沿滑槽来回滑动;所述的滑动板3一侧与安装箱体1内的第一电动伸缩杆4连接;所述的安装箱体1内部设置升降座5,升降座5位于安装箱体1内对应顶部敞开一侧的底部位置。所述的安装箱体1内固定有毫米波雷达6,毫米波雷达6位于顶板2下方,所述的升降座5上安装有激光雷达7。第一电动伸缩杆4通过第一驱动电机8控制。
[0013]
具体地,所述的升降座5底部通过安装箱体1内的第二电动伸缩杆9控制升降,第二电动伸缩杆9通过安装箱体1内的第二驱动电机10控制;所述的安装箱体1底部设置吸盘12;所述的安装箱体1底部设置线束管12,线束管12内设置连接线束,线束管12与安装箱体1内部连通,连接线束用于将安装箱体1内部的各种控制及连接线路与车体连接。
[0014]
进一步地,第一驱动电机8与第二驱动电机10均与控制器(未图示)连接;控制器通过连接线束与can总线连接。所述的控制器可以采用普通的工控机,具体型号及规格不做限制。当然此处也可以直接通过连接线与车辆原有的智能驾驶控制器或者车辆ecu连接,从而通过车辆原装的ecu或者控制器实现各种控制。
[0015]
其具体工作方式为:如图所示,控制器通过can总线获取雷达控制信号,当激光雷达7关闭后,控制器控制第二驱动电机10工作,第二驱动电机10控制第二电动伸缩杆9收缩,升降座5带动激光雷达7下降,进入安装箱体1内部,与此同时,控制器控制第一驱动电机8带动第一电动伸缩杆4伸展,推动滑动板3在滑槽内向右滑动,使部分滑动板3在空腔内滑出,从而使安装箱体1顶部敞开一侧关闭,使安装箱体1形成密闭空间;对应的,当控制器通过can总线检测到激光雷达7开启后,控制器控制第一驱动电机8带动第一电动伸缩杆4收缩,拉动滑动板3在滑槽内向左滑动,使滑动板3滑动到顶板2的空腔内,从而使安装箱体1顶部一侧打开,与此同时,利用控制器控制第二驱动电机10工作,第二驱动电机10控制第二电动伸缩杆9伸展,升降座5带动激光雷达7上升,直至激光雷达7完全暴露在安装箱体1的外部,避免其受到干扰。
[0016]
上述实施例的阐明了本装置的结构及工作原理,本领域技术人员可以根据实际需要增加安装箱体内激光雷达、毫米波雷达的数量,多个雷达传感器相互配合使用,实现对周围环境的全方位监测。
[0017]
另外,本方案中涉及的安装箱体,其目的是在某些情况下将激光雷达、毫米波雷达进行隐藏,在完成本方案所述的作用功能下其具体结构及形式不做限制。
[0018]
本实用新型将激光雷达与毫米波雷达设置在同一安装箱体内形成一个整体,充分发挥毫米波雷达穿透能力强的特点,将其隐蔽设置在箱体内,既增加了车辆的美观性,又能避免长期暴露提高其使用寿命。通过升降座实现激光雷达的升降,当其工作时,通过升降控制将其完全暴露在安装箱体外,使其不受箱体干扰;当其停止工作时,可以隐藏在安装箱体内部,既能增强整体美观性,又能避免落尘等对其造成影响。安装箱体底部设置吸盘,能够将整个装置吸附在车顶,安装方便。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1