位置推断装置的制作方法
1.本发明涉及位置推断装置。
背景技术:
2.近年来,不断推进马达的小型化和薄型化。磁传感器与定子之间的间隔对应马达的小型化和薄型化而变窄,因此,马达的磁传感器有时不仅检测到转子的磁体磁通量,还检测到定子的干扰磁通量。因此,为了使位置推断装置高精度地对转子的位置进行检测,需要位置推断装置对转子的磁体磁通量的检测值进行修正。现有技术文献专利文献
3.专利文献1:日本专利特开2016
‑
133376号公报专利文献2:日本专利特开2018
‑
163177号公报专利文献3:日本专利特开2016
‑
169981号公报
技术实现要素:
发明所要解决的技术问题
4.然而,为了使位置推断装置对转子的磁体磁通量的检测值进行修正,需要转子包括对转子的位置进行检测的位置传感器用的磁体。因此,不利于马达的小型化和薄型化。
5.鉴于上述情况,本发明的目的在于提供一种位置推断装置,能在转子不包括位置传感器用的磁体的情况下提高转子的位置的推断精度。解决技术问题所采用的技术方案
6.本发明的一个方面是一种位置推断装置,包括:修正部,所述修正部导出定子的干扰磁通量的推断值,并基于所述干扰磁通量的推断值对转子的磁体磁通量的检测值进行修正;以及推断部,所述推断部基于修正后的所述检测值来推断所述转子的位置。发明效果
7.根据本发明,能在马达的转子不包括位置传感器用的磁体的情况下提高转子的位置的推断精度。
附图说明
8.图1是表示第一实施方式的马达单元的结构的例子的图。图2是表示第一实施方式的、由各传感器检测出的磁通量的检测值的例子的图。图3是表示第二实施方式和第三实施方式的马达单元的结构的例子的图。图4是表示第四实施方式的马达单元的结构的例子的图。
具体实施方式
9.参照附图,对本发明的实施方式进行详细说明。
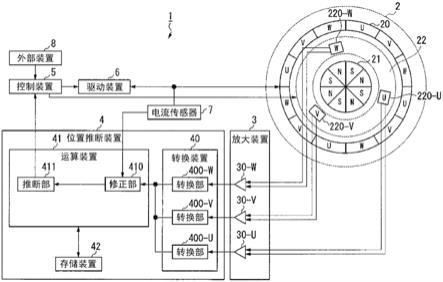
(第一实施方式)图1是表示马达单元1的结构的例子的图。马达单元1是对马达的转子的旋转位置进行推断的系统。马达单元1包括马达2、放大装置3、位置推断装置4、控制装置5、驱动装置6和电流传感器7。
10.马达2是电动机,例如是无刷马达、步进马达。马达2既可以是内转子型马达,也可以是外转子型马达。图1所示的马达2作为一例是内转子型马达。马达2包括定子20、转子21和检测装置22。
11.定子20在u相、v相和w相的各齿(各切槽)上包括绕组。在图1中,定子20包括:四切槽的u相的绕组、四切槽的v相的绕组、四切槽的w相的绕组共计12切槽的绕组。相位各错开120度的三相电流从驱动装置6输入到定子20的齿的绕组中。定子20通过输入到u相、v相和w相的各齿的绕组的三相电流而在转子21和检测装置22的位置产生磁场。
12.转子21由于受到定子20的磁力而绕中心轴旋转。转子21包括一个以上的磁极对(n极和s极)。在图1中,转子21作为一例包括四个磁极对。转子21由于磁极对从定子20受到磁力而旋转。对磁极对分配有极对编号。极对编号对应区域和区段而标注。
13.检测装置22是对磁场强度进行检测的装置。检测装置22对转子21附近的三处以上的磁场强度进行检测。检测装置22包括三个以上的磁场传感器。在图1中,检测装置22包括传感器220
‑
u、传感器220
‑
v和传感器220
‑
w。磁场传感器例如是霍尔元件、线性霍尔ic(integrated circuit:集成电路)、磁阻传感器。在本实施方式中,对磁场传感器是霍尔元件的情况进行说明。
14.传感器220
‑
u是对包括转子21的磁体磁通量和定子20的u相的绕组(电磁体)的磁通量(干扰磁通量)的u相的磁场强度进行检测的传感器。传感器220
‑
u将表示u相的磁场强度的差动信号、即u相差动信号输出给放大装置3。
15.传感器220
‑
v是将转子21的v相的磁体磁通量作为v相的磁场强度进行检测的传感器。有时传感器220
‑
v将v相的磁体磁通量和干扰磁通量作为v相的磁场强度进行检测。传感器220
‑
v将表示v相的磁场强度的差动信号、即v相差动信号输出给放大装置3。
16.传感器220
‑
w是将转子21的w相的磁体磁通量作为w相的磁场强度进行检测的传感器。有时传感器220
‑
w将w相的磁体磁通量和干扰磁通量作为w相的磁场强度进行检测。传感器220
‑
w将表示w相的磁场强度的差动信号、即w相差动信号输出给放大装置3。
17.放大装置3是将差动信号的波形的振幅放大的装置。放大装置3包括差动放大器30
‑
u、差动放大器30
‑
v和差动放大器30
‑
w。差动放大器30
‑
u通过对u相差动信号执行放大处理来生成模拟的u相信号hu。差动放大器30
‑
v通过对v相差动信号执行放大处理来生成模拟的v相信号hv。差动放大器30
‑
w通过对w相差动信号执行放大处理来生成模拟的w相信号hw。
18.位置推断装置4是对马达的转子的旋转位置进行推断的信息处理装置。位置推断装置4从放大装置3获取模拟的u相信号hu、模拟的v相信号hv和模拟的w相信号hw。位置推断装置4对u相信号hu、v相信号hv和w相信号hw的各波形的多个特征量进行计算。位置推断装置4基于算出的各波形的多个特征量对马达2的转子21的旋转位置进行推断。位置推断装置4将旋转位置的推断结果(极对编号)输出给控制装置5。
19.控制装置5是生成控制信号的信息处理装置。控制装置5基于指示信号生成控制信号。控制信号例如是表示与所指示的旋转方向(cw:clckwise:顺时针、ccw:
counterlockwise:逆时针)对应的寄存器值的信号、表示从驱动装置6输出给定子20的电流的电流值的信号。控制信号也可以是例如供给至马达2的检测装置22的电源的电流信号。控制装置5能通过对供给至检测装置22的电源的电流量进行控制以对各传感器220的电源进行控制。
20.驱动装置6是驱动马达的转子的装置。控制信号从控制装置5输入到驱动装置6。驱动装置6将由控制信号表示的电流值的三相电流输入给定子20的各绕组。驱动装置6能通过将三相电流输入给定子20的各绕组以使转子21旋转。详细内容将在后文中进行叙述,但在第一实施方式中,在驱动装置6不将三相电流输入给定子20的各绕组的状态下进行转子21的位置推断。即,在第一实施方式中,位置推断装置4对停止过程中的转子21的旋转位置进行推断。另外,位置推断装置4也可以对旋转过程中的转子21的旋转位置进行推断。
21.电流传感器7对驱动装置6输出给定子20的各绕组的电流的响应值(以下,称为“电流响应值”)进行检测。电流传感器7将检测到的电流响应值输出给位置推断装置4。
22.外部装置8是生成转子的旋转方向和转速等指示信号的信息处理装置。外部装置8将指示信号输出给控制装置5。
23.接着,对位置推断装置4的结构例的详细内容进行说明。位置推断装置4包括转换装置40、运算装置41和存储装置42。转换装置40是将模拟信号转换为数字信号的装置。放大装置40包括转换部400
‑
u、转换部400
‑
v和转换部400
‑
w。
24.转换部400是将模拟信号转换为数字信号的设备。转换部400
‑
u将从差动放大器30
‑
u获取的模拟的u相信号转换为数字的u相信号。转换部400
‑
v将从差动放大器30
‑
v获取的模拟的u相信号转换为数字的v相信号。转换部400
‑
w将从差动放大器30
‑
w获取的模拟的w相信号转换为数字的v相信号。
25.运算装置41是执行运算处理的装置。运算装置41的局部或全部是通过cpu(central processing unit:中央处理单元)等处理器执行在存储器中展开的程序而实现的。运算装置41的局部或全部例如也可以使用lsi(large scale intergration:大规模集成)、asic(application specific integrated circuit:专用集成电路)等硬件来实现。
26.运算装置41包括修正部410和推断部411。修正部410从电流传感器7获取定子20的齿的绕组的电流响应值“i”。修正部410基于定子20的齿的绕组的电流响应值“i”来导出定子20的干扰磁通量的推断值。修正部410基于定子20的干扰磁通量的推断值对转子21的磁体磁通量“φm(t)”(t表示抽样时刻)的检测值进行修正。即,修正部410对u相信号hu、v相信号hv和w相信号hw的各磁场强度的波形进行修正。修正部410将修正后的转子21的磁体磁通量的检测值输出给推断部411。
27.由此,与推断部411基于未修正的波形推断转子21的旋转位置的精度相比,修正部410能提高推断部411推断转子21的旋转位置的精度。
28.推断部411从修正部410获取修正后的转子21的磁体磁通量的检测值。推断部411基于修正后的转子21的磁体磁通量的检测值对转子21的旋转位置进行推断。例如,推断部411通过线段连接法(日本特许第6233532号公报)对转子21的旋转位置进行推断。推断部411将转子21的旋转位置的推断结果(极对编号)输出给控制装置5。
29.存储装置42最好是例如闪存、hdd(hard disk drive:硬盘驱动器)等非易失性的存储介质(非临时性的存储介质)。存储装置42也可以包括ram(random access memory:随
机存取存储器)等易失性的存储介质。存储装置42对程序、学习值等数据表格进行存储。
30.接着,对修正部410的详细内容进行说明。转子21的磁体磁通量的检测值“v
h
(θ)”如式(1)所示。
31.[数学式1]
[0032]
在此,“φ
m
(θ)”表示转子21的磁体磁通量。“φ
s
(θ,i)”表示定子的干扰磁通量。“θ”表示电角度。“i”表示定子20的齿的绕组的电流值。运算符号“*”表示乘法。系数“a”和“b”是基于实验结果等而确定的。
[0033]
定子的干扰磁通量“φ
s”与定子20的齿的绕组的电流响应值“i”成正比。因此,修正部410基于定子20的干扰磁通量“φs”的推断值和定子20的齿的绕组的电流响应值“i”以式(2)的方式对转子21的磁体磁通量的检测值“v
h
(θ)”进行补偿。
[0034]
[数学式2]其中,
[0035]
此处,“k”表示系数(比例常数)。系数是基于实验结果等而确定的。修正部410基于u相的电流响应值“iu”、v相的电流响应值“iv”和w相的电流响应值“iw”这三相的电流的反馈信息来对转子21的磁体磁通量的检测值(h1,h2,h3)进行修正。修正部410以式(3)的方式导出修正后的转子21的磁体磁通量的检测值(h’1,h’2,h’3)。
[0036]
[数学式3]
[0037]
传感器220
‑
u将u相的绕组的电磁体的磁通量作为u相的干扰磁通量进行检测。传感器220
‑
v将v相的绕组的电磁体的磁通量作为v相的干扰磁通量进行检测。传感器220
‑
w将w相的绕组的电磁体的磁通量作为w相的干扰磁通量进行检测。因此,修正后的转子21的磁体磁通量的检测值(h'1,h'2,h'3)是使用传感器220
‑
u的磁通量的检测值“h1”、传感器220
‑
v的磁通量的检测值“h2”和传感器220
‑
w的磁通量的检测值“h3”以将式(3)一般化而形成的式(4)的方式表示。
[0038]
[数学式4]
[0039]
另外,“h'1”、“h'2”、“h'3”、“h1”、“h2”、“h3”、“iu”、“iv”和“iw”也可以分别是离散数据。
[0040]
图2是表示由各传感器220检测到的磁通量“h”的检测值的例子的图。在图2的上层示出了由各传感器220检测到的磁通量的检测值的各波形、即未修正的各波形。横轴表示转子21的旋转角。纵轴表示包括干扰磁通量的磁体磁通量“h”的检测值(数字值)。未修正的波形变成重叠有一阶成分的波形。在未修正的波形中,波形的相位因波形歪曲而偏移。因此,在推断部411使用未修正的波形执行位置推断处理的情况下,位置推断的精度下降。
[0041]
在图2的下层示出了由各传感器220检测到的磁通量的检测值的各波形、即修正后的波形。横轴表示转子21的旋转角。纵轴表示干扰磁通量的影响减小后的磁通量“h”的检测值(数字值)。在修正后的波形中,磁通量的检测值的波形的相位未偏移。因此,在推断部411使用修正后的波形执行位置推断处理的情况下,位置推断的精度上升。
[0042]
如上所述,第一实施方式的位置推断装置4包括修正部410和推断部411。修正部410导出定子20的干扰磁通量的推断值。修正部410基于定子20的绕组(定子齿的绕组)的电流响应值来导出定子20的干扰磁通量的推断值。修正部410基于定子20的干扰磁通量的推断值来对转子21的磁体磁通量的检测值进行修正。推断部411基于修正后的检测值来对转子21的位置进行推断。
[0043]
由此,能在马达2的转子21不包括位置传感器用的磁体的情况下提高转子21的位置的推断精度。即使转子21的磁体为永磁体,也能提高转子21的位置的推断精度。
[0044]
(第二实施方式)在第二实施方式中,定子20的干扰磁通量是基于电流指令值被导出的这一点与第一实施方式不同。在第二实施方式中,对与第一实施方式的不同点进行说明。
[0045]
图3是表示马达单元1的结构的例子的图。马达单元1包括马达2、放大装置3、位置推断装置4、控制装置5和驱动装置6。
[0046]
修正部410从控制装置5获取定子20的u相的电流指令值“iu﹡(t)”、定子20的v相的电流指令值“iv﹡(t)”和定子20的w相的电流指令值“iw﹡(t)”。修正部410基于定子20的齿的绕组的电流指令值“i﹡”来导出定子20的干扰磁通量的推断值。电流指令值“i﹡”与定子20的干扰磁通量的推断值的对应关系是基于例如实验结果来确定的。
[0047]
如上所述,第二实施方式的修正部410基于定子20的电流指令值来导出定子20的干扰磁通量的推断值。由此,能在不使用电流传感器的情况下提高转子的位置的推断精度。即使转子21的磁体为永磁体,也能提高转子21的位置的推断精度。
[0048]
(第三实施方式)在第三实施方式中,定子20的干扰磁通量是基于电压指令值被导出的这一点与第
二实施方式不同。在第三实施方式中,对与第二实施方式的不同点进行说明。
[0049]
修正部410从控制装置5获取定子20的u相的电压指令值“vu﹡(t)”、定子20的v相的电压指令值“vv﹡(t)”和定子20的w相的电压指令值“vw﹡(t)”以作为电压指令值“v﹡
abcs”。
[0050]
修正部410基于u相的电压指令值“vu﹡(t)”、v相的电压指令值“vv﹡(t)”、w相的电压指令值“vw﹡(t)”和马达的模型来导出定子20的干扰磁通量。永磁体同步马达等马达的模型以式(5)和式(6)的方式表示。
[0051]
[数学式5]
[0052]
此处,“v
abcs”表示相电压。“i
abcs”表示电流响应值(相电流)。“λ
abcs”表示与相线圈(绕组)交链的磁通量的总计。“r
s”表示定子的相线圈阻抗。“θ
r”表示转子的电角度。“φ
m”表示磁体磁通量。“l
ls”表示定子20的相线圈漏电感。“l
ms”表示定子20的相线圈磁化电感。在内置磁体型同步马达(interior permanent magnet synchronous motor:ipmsm)的情况下,自感和交感包括与“cos(2θ
r
+k
×
2π/3)(其中,k=0
±
1)”成正比的二阶高频波(l
2s
)。因此,自感和交感被加到常数“l
ms”。此外,高阶谐波被无视。
[0053]
[数学式6]
[0054]
此处,式(6)的右边的第一项的矩阵表示电感矩阵“l
abcs”。式(6)的右边的第一项表示定子20的齿的绕组的干扰磁通量(电磁体的磁通量)“λ
abc_coil”。式(6)的右边的第二项的矩阵表示三相单位矩阵“u
abcs”。式(6)的右边的第二项表示转子21的磁体磁通量(永磁体的磁通量)“λ
abc_pm”。
[0055]
修正部410基于从控制装置5获取的电压指令值“v﹡
abcs”以式(7)的方式导出电流响应值的推断值“^i
abcs”。
[0056]
[数学式7]
[0057]
修正部410基于电流响应值的推断值“^i
abcs”来导出定子20的干扰磁通量的推断值。修正部410基于定子20的干扰磁通量的推断值来对转子21的磁体磁通量“φ
m
(t)”的检
测值进行修正。
[0058]
修正部410也可以基于式(7)的z转换的结果、即差分方程式来导出电流响应值的推断值“^i
abcs”。
[0059]
由传感器220
‑
u检测到的磁通量的检测值“h1”、由传感器220
‑
v检测到的磁通量的检测值“h2”和由传感器220
‑
w检测到的磁通量的检测值“h3”是基于由式(a)、式(b)和式(c)表示的位置关系来确定的。
[0060]
λ
h_coil
=k
h_coil
×
λ
abc_coil
ꢀꢀꢀ
(a)
[0061]
此处,“λ
h_coil”表示定子20的齿的绕组的干扰磁通量。“k
h_coil”表示定子20的齿的绕组的干扰磁通量的增益。“k
h_coil”与(1/h
coil
)成正比。“h
coil”表示从定子20的齿到传感器220的间隙长度。
[0062]
λ
h_pm
=k
h_pm
×
λ
abc_pm
ꢀꢀꢀ
(b)
[0063]
此处,“λ
h_pm”表示转子21的永磁体的磁通量。此处,“k
h_pm”表示转子21的磁体磁通量的增益。“k
h_pm”与(1/h
pm
)成正比。“h
pm”表示从转子21的永磁体到传感器220的间隙长度。
[0064]
(θ
r
-θ
h
)
ꢀꢀꢀ
(c)
[0065]
此处,“θ
h”表示定子20的齿的中心线的位置。“θ
r
-θ
h”表示转子21的电角度与定子20的齿的中心线的位置关系。
[0066]
传感器220输出的电压“v
h”是基于式(d)以式(e)的方式确定的。
[0067]
v
h_coil
=k
h_gain
[mv/mt]
×
λ
h_coil
ꢀꢀꢀ
(d)
[0068]
此处,“v
h_coil”表示与定子20的齿的绕组的磁通量对应的电压。“k
h_gain
[mv/mt]”表示传感器220的灵敏度。
[0069]“v
h
=v
h_coil
+v
h_pm
”ꢀꢀꢀ
(e)
[0070]
此处,“v
h_pm”表示与转子21的永磁体的磁通量对应的电压。
[0071]
运算放大器所输出的电压“vop”以式(f)的方式表示。
[0072]
v
op
=k
op
×
v
h
+v
offset
ꢀꢀꢀ
(f)
[0073]
驱动装置6所输出的电压“vop”的范围是例如0v至3.3v的范围。
[0074]
从运算装置41输出的检测值(数字值)“n
digit”以式(g)的方式表示。
[0075]
n
digit
=k
adc
×
v
op
ꢀꢀꢀ
(g)
[0076]
此处,“k
adc”表示转换部400的增益。“k
adc”的范围是0至4095的范围。在用12比特表现增益的情况下,“k
adc”的分辨率为4095/3.3[digit/v]。
[0077]
另外,修正部410也可以使用数据表格来对上述式(a)至式(g)的各值进行插值。
[0078]
如上所述,第三实施方式的修正部410基于针对定子20的绕组的电压指令值来导出定子20的干扰磁通量的推断值。由此,能在不使用电流传感器的情况下提高转子21的位置的推断精度。即使转子21的磁体为永磁体,也能提高转子21的位置的推断精度。
[0079]
(第四实施方式)在第四实施方式中,预先学习电流响应值和定子20的干扰磁通量,修正部410基于学习到的定子20的干扰磁通量对转子21的磁体磁通量进行修正这一点与第一实施方式不同。在第四实施方式中,对与第一实施方式的不同点进行说明。
[0080]
图4是表示马达单元1的结构的例子的图。马达单元1包括马达2、放大装置3、位置推断装置4、控制装置5、驱动装置6和电流传感器7。
[0081]
存储装置42对预先学习到的干扰磁通量信息进行存储。干扰磁通量信息是表示定子20的电流响应值与定子20的干扰磁通量的推断值的对应关系的信息(数据表格)。存储装置42也可不仅对干扰磁通量信息进行存储,还对预先学习到的响应值信息进行存储。响应值信息是表示定子20的电流指令值或电压指令值与定子20的电流响应值的对应关系的信息。
[0082]
修正部410从存储装置42获取干扰磁通量信息。修正部410从电流传感器7获取电流响应值“i”。修正部410从干扰磁通量信息中抽出与获取的电流响应值“i”对应的干扰磁通量的推断值“k﹡i”。“k﹡i”中的运算符号“﹡”表示乘法。修正部410基于抽出的干扰磁通量的推断值“k﹡i”对转子21的磁体磁通量的检测值“φm(t)”进行修正。
[0083]
修正部410也可以从存储装置42获取响应值信息和干扰磁通量信息。修正部410从控制装置5获取电流指令值。修正部410从控制装置5获取电压指令值。修正部410也可以从响应值信息中抽出与获取的电压指令值对应的电流响应值。
[0084]
修正部410从响应值信息中抽出与获取的电流指令值或电压指令值对应的电流响应值。修正部410从干扰磁通量信息中抽出与抽出的电流响应值对应的干扰磁通量的推断值。修正部410基于抽出的干扰磁通量的推断值来对转子21的磁体磁通量“φm(t)”的检测值进行修正。
[0085]
另外,修正部410也可以使用查找表来导出定子20的干扰磁通量的推断值。修正部410也可以基于使用查找表导出的干扰磁通量的推断值来对转子21的磁体磁通量“φm(t)”的检测值进行修正。
[0086]
如上所述,第四实施方式的位置推断装置4包括修正部410、推断部411和存储装置42。存储装置42对响应值信息进行存储。存储装置42也可以对响应值信息和干扰磁通量信息进行存储。修正部410基于电流指令值或电压指令值和响应值信息来导出电流响应值。修正部410基于导出的电流响应值和干扰磁通量信息来导出定子20的干扰磁通量的推断值。
[0087]
由此,运算量得到削减,能提高转子21的位置的推断精度。即使转子21的磁体为永磁体,也能提高转子21的位置的推断精度。
[0088]
以上,参照附图对本发明的实施方式进行了详细叙述,但具体结构并不局限于本实施方式,不脱离本发明的宗旨的范围的设计等也包含在内。
[0089]
另外,也可以通过将用于实现本发明的位置推断装置的功能的程序记录于未图示的计算机可读取的记录介质,并使计算机系统读取记录于上述记录介质的程序并执行,以进行各处理的步骤。另外,此处所谓的“计算机系统”包括os、周边设备等的硬件。此外,“计算机系统”还包括具有主页提供环境(或显示环境)的www系统。此外,“计算机可读取的记录介质”是指“软盘、磁光盘、rom、cd
‑
rom等便携式介质、内置于计算机系统的硬盘等存储装置”。而且,“计算机可读取的记录介质”也包括像经由因特网等网络、电话线等通信线路发送程序的情况下的服务器、作为客户端的计算机系统内部的易失性存储器(ram)那样将程序保持一定时间的介质。
[0090]
此外,上述程序也可以从将上述程序收纳于存储装置等的计算机系统经由传输介质或传输介质中的传输波被传输给其它计算机系统。此处,传输程序的“传输介质”是指具有以因特网等网络(通信网络)、电话线等通信线路(通信线)的方式传输信息的功能的介质。此外,上述程序也可以是用于实现前述功能的一部分的程序。而且,也可以是能通过与
已记录于计算机系统的程序的组合来实现前述功能的、所谓的差分文件(差分程序)。(符号说明)
[0091]
1马达单元;2马达;3放大装置;4位置推断装置;5控制装置;6驱动装置;7电流传感器;8外部装置;20定子;21转子;22检测装置;30差动放大器;40转换装置;41运算装置;42存储装置;220传感器;400转换部;410修正部;411推断部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1