用于估计电动或混合动力机动车辆中高压电路的绝缘电阻的方法与流程
用于估计电动或混合动力机动车辆中高压电路的绝缘电阻的方法
1.本发明涉及电动或混合动力车辆的领域。本发明更具体地涉及一种用于确定包括高压电池的电动或混合动力车辆的高压电路上的点与车辆接地端之间的绝缘电阻的方法。
2.在具有配备有至少一个电动机器的牵引系的电动或混合动力机动车辆中,该电动机器用于提供驱动车辆所需的马达转矩。为此,电力由高压电池输送到电动机器。所需的电压水平达到几百伏,通常约为400伏。这种电池还具有大容量,以便提高车辆在电动模式下的里程。汽车应用所特有的许多技术原因导致在车辆车身或机械接地端(由车辆的金属底盘和金属车体形成,并且因此使用者可触及)与电池的电位之间使用绝缘。因此,车辆中与电池电连接的任何部分都必须与接地端绝缘。这种绝缘是通过使用电绝缘材料实现的。然而,随着时间的推移,绝缘可能会劣化,并且因此使车辆的接地端处于对车辆乘客或任何与车辆接触的人造成危险的电位。
3.这就是为什么必须检查高压电路上任何点与车辆接地端之间的绝缘电阻,以防止车辆乘客或任何与车辆接触的人受到潜在的电击。特别地,这种监测可以使得能够在第二次绝缘故障发生之前校正第一次绝缘故障。具体来说,只有双重故障才会造成可能导致车辆发生故障的短路。
4.该绝缘电阻可以用物理方式测量或被估计。
5.用物理方式测量绝缘电阻需要在被测绝缘点注入高电压和高电流。但是,有必要能够随时了解车辆的高压电路上的任何点与车辆接地端之间的绝缘电阻,同时仍允许系统保持运行,换句话说,不会导致牵引或负载中断。
6.因此,在电动和混合动力车辆运行期间检查其高压网络的绝缘的情况下,优选通过估计获得绝缘电阻。
7.该估计必须足够准确,决不能过量估计,以便允许可靠地检测任何绝缘故障;也不能低估,以避免任何可能导致车辆故障的错误检测。
8.用于检测电动或混合动力车辆的绝缘故障的设备在现有技术中是已知的,这些设备基于电阻测量电路,其中,使用由连接在电池端子之间的多个电阻器形成的分压器桥来测量漏电流。这种电路的缺点是需要连接到电池的两个端子,这使得这种电路在车辆内的集成变得复杂。
9.文件fr 3037406披露了一种用于检测电动车辆的高压电池与车辆车身(其形成车辆的电气接地端)之间的电绝缘故障的电路。该检测电路电连接到车身和电池的单个第一端子,例如,电池的负极端子。绝缘故障通常表现为连接电池上的点(例如,位于电池的两个相邻电池单元之间的点)与车身的绝缘电阻的值低于安全阈值。因此,潜在的危险漏电流从电池上的该点通过该绝缘电阻流向车身。根据上述文件的检测电路包括可控dc电压源,该可控dc电压源一方面连接到车身,另一方面连接到电池的单个第一端子,从而允许在车身与单个第一端子之间施加各种电压值。该检测电路还包括用于测量通过电池的单个第一端子流入并通过电池上的某个点流出的呈现绝缘故障的电流的设备,该电流然后通过绝缘电阻流向车身。因此,由可控电压源施加的电压产生流过测量设备和绝缘电阻的电流。以这种
方式,对于由可控电压源施加的每个电压值,获得该电流的测量值,由此可以计算电池上所讨论的点与车身之间的绝缘电阻值。
10.但是,根据这种方法计算绝缘电阻值相对耗时。特别地,需要将车身和电池的单个第一端子以不同的电位偏置一定时间,以达到可以进行漏电流测量的稳定状态。获得这种稳定状态所需的时间可能不利于实施用于检查车辆的高压网络绝缘的可靠策略。
11.因此,本发明的目的是至少部分地克服这种限制。
12.为此,本发明涉及一种用于确定电动或混合动力车辆的高压电池上的点与车辆车身之间的绝缘电阻的方法,该方法包括以下步骤:
13.提供连接到该车身和该电池的单个第一端子的可控dc电压源,
14.在该单个第一端子与该车身之间提供与所述电压源串联连接的第一电阻器,该第一电阻器能够限制通过该电池的单个第一端子流入的电流,
15.提供串联连接在该第一电阻器与所述电压源之间的第二电阻器,
16.提供能够测量跨该第二电阻器两端的电压的测量设备,
17.通过所述电压源在该车身与该电池的单个第一端子之间施加不同的连续电压设定点值,
18.通过所述测量设备获取电压测量信号,该电压测量信号表示对于连续施加的每个电压设定点值,跨所述第二电阻器两端的电压的测量值,
19.基于所述电压测量信号计算该绝缘电阻的值,
20.该方法的特征在于,该方法实施了该电压测量信号的自适应滤波步骤,并且该方法包括以下步骤:以递归方式估计自适应滤波器的传递函数系数的向量,提供滤波系数的更新,基于所述估计值计算该绝缘电阻值。
21.应用本发明的方法使得可以在不增加计算复杂度的情况下优化用于确定绝缘电阻的方法的收敛速度。
22.有利地,该绝缘电阻的值通过以下公式计算:
[0023][0024]
其中,ri是该绝缘电阻的值,rd是该第一电阻器的值,rm是该第二电阻器的值,并且是该自适应滤波器的传递函数系数的向量的估计值。
[0025]
有利地,通过考虑输入信号u(k)和输出信号y(k)的传递函数来估计自适应滤波器的传递函数系数的向量,该输入信号和该输出信号定义如下:
[0026]
u(k)=u
d2
(k)-u
d1
(k)=δud(k)
[0027]
y(k)=u
m2
(k)-u
m1
(k)=δum(k)
[0028]
其中,u
m1
(k)和u
m2
(k)分别对应于针对由所述电压源连续施加的这些电压设定点值u
d1
(k)和u
d2
(k),跨所述第二电阻器两端测量的电压值。
[0029]
有利地,该滤波器传递函数的输入信号被替换为如下定义的输入信号:
[0030][0031]
其中,u
bat1
和u
bat2
分别对应于针对由所述电压源连续施加的电压设定点值,所考虑
的总电池电压值,以便考虑在施加电压设定点值的每次迭代中总电池电压的变化。
[0032]
优选地,该方法包括基于所述估计值计算该绝缘电阻相对于该电池的单个第一端子的位置的步骤。
[0033]
有利地,通过考虑输入信号u(k)和输出信号y(k)的传递函数来估计自适应滤波器的传递函数系数的向量,该输入信号和该输出信号定义如下:
[0034]
u(k)=u
bat
·
(u
m2-u
m1
)
[0035]
y(k)=u
m1ud2-u
d1um2
[0036]
其中,u
m1
和u
m2
分别对应于针对由所述电压源连续施加的这些电压设定点值u
d1
和u
d2
,跨所述第二电阻器两端测量的电压值,并且u
bat
是该总电池电压。
[0037]
有利地,该滤波器传递函数的输入信号被替换为如下定义的输入信号:
[0038]
u(k)=u
m2
·ubat1-u
m1
·ubat2
[0039]
其中,u
bat1
和u
bat2
分别对应于针对由所述电压源连续施加的电压设定点值,所考虑的总电池电压值,以便考虑在施加电压设定点值的每次迭代中总电池电压的变化。
[0040]
有利地,该滤波步骤通过递归最小二乘算法进行。
[0041]
有利地,该方法包括使用单个滤波设置参数,所述设置参数表示滤波器的遗忘因子、由值0到1之间的实系数组成。
[0042]
本发明还涉及一种用于确定电动或混合动力车辆的高压电池(1)上的点与该车辆的车身之间的绝缘电阻的设备,该设备包括用于检测该电池与该车身之间的绝缘故障的检测电路,该检测电路包括:可控dc电压源,该可控dc电压源能够在该电池的单个第一端子与该车身之间施加电压设定点;在该单个第一端子与该车身之间的与所述电压源串联连接的第一电阻器,该第一电阻器能够限制通过该电池的单个第一端子流入的电流;串联连接在该第一电阻器与所述电压源之间的第二电阻器;以及测量设备,该测量设备能够测量跨该第二电阻器两端电压;该设备包括控制单元,该控制单元能够通过所述电压源控制在该车身与该电池的单个第一端子之间施加不同的连续电压设定点值;能够通过所述测量设备获取电压测量信号,该电压测量信号表示对于连续施加的每个电压设定点值,跨所述第二电阻器两端的电压的测量值;并且能够基于所述电压测量信号计算该绝缘电阻的值,其特征在于,所述控制单元包括自适应滤波模块,该自适应滤波模块用于根据上述方法实施自适应滤波处理。
[0043]
通过阅读作为说明性的而非限制性的示例并参照以下单一附图而给出的以下描述,本发明的其他特征和优点将变得更清楚:
[0044]
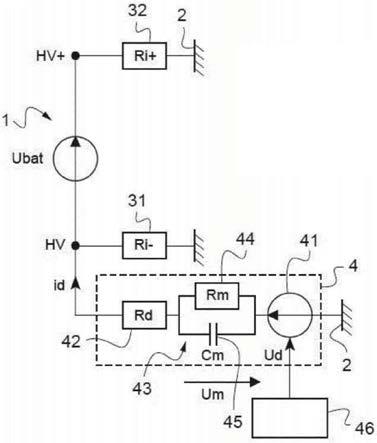
[图1]示意性地示出了用于检测电动或混合动力机动车辆的高压电池中的绝缘故障的电路;
[0045]
[图2]示意性地示出了图1的高压电池中的绝缘故障。
[0046]
以下描述涉及本发明在应用于电动或混合动力机动车辆的高压电网方面的一个示例性实施例。参考图1,电动或混合动力机动车辆包括可再充电高压电池1作为车载高压电源。电池1包括两个端子,分别为正极端子hv+和负极端子hv-。电池1由串联连接在电池的两个端子hv-与hv+之间的一组电池单元组成。电池1被设计为输送dc电压u
bat
,该dc电压的值随时间保持恒定。在这个示例中,电池电压u
bat
等于400v。
[0047]
连接到电池的端子hv+和hv-的是包括逆变器和用于推进车辆的电动机器的电负
载(未示出)。逆变器将电池电压u
bat
转换为电动机器的ac供电电压。车辆还包括由车辆的底盘和车体形成的车身2,底盘和车体通常由金属制成。该车身构成车辆的电气接地端,在车辆的高压电池上的点发生绝缘故障的情况下,电荷可以流向该接地端。
[0048]
此处绝缘故障的意思是在车辆的车身2与电池上的电位点(比如,电池的端子hv+、hv-之一)之间异常地存在低电阻的电接触。图1展示了在车辆的车身2与电池的各个端子hv+和hv-中的每一个之间的电阻31、32,这些电阻的值分别由ri+和ri-表示。如果这种电阻的值低于或等于预定义的安全阈值(例如,100kω),则称这种电阻的值为低。通常,在没有绝缘故障的情况下,一方面车身2与另一方面端子hv+和hv-之间的电阻,并且更一般地,车身与电池1上的任何电位点之间的电阻高于100kω或1mω。可替代地,该电阻器可以被建模为无限值的电阻。由于该高电阻值,电池1与车身2之间没有潜在的危险漏电流流动。
[0049]
图2展示了电池1上的点3与车身2之间的单个绝缘故障。该绝缘故障在此表现为绝缘电阻30,该绝缘电阻连接该点3和车身2、并具有由ri表示的低于安全阈值的值。然后潜在的危险漏电流通过该电阻器30从电池1流向车身2。这种漏电流是不希望的,并且可能危及可能与车身2直接接触的车辆使用者。例如,点3位于电池1的两个相邻电池单元之间。然后可以将电池1比作在点3的两侧的两个dc电压源11和12,这两个dc电压源在端子hv+与hv-之间彼此串联连接。源11、12在它们的端子之间分别输送电压(1-α)*u
bat
和α*u
bat
,其中,系数α是[0;1]范围内的实数。知道系数α就可以知道电池1中绝缘故障的位置。因此,指示电池的绝缘状态的绝缘电阻位于相对于电池的端子hv-的位置α和相对于端子hv+的位置(1-α)处。
[0050]
如图1和图2所示,车辆进一步包括电路4,该电路用于检测车辆的高压电池1与车辆的车身2之间的这种绝缘故障。检测电路4电连接在车身2与电池1的单个端子(此处为端子hv-)之间。换句话说,检测电路4的端子一方面连接到车身2(其构成车辆的接地端),另一方面连接到车辆的高压电池1的端子hv-。
[0051]
检测电路4包括可控dc电压源41,该可控dc电压源能够根据从控制单元46接收的控制信号,将非零电压设定点ud施加到端子hv-与车身之间的电路,以便在必要时产生跨绝缘电阻30两端的电位差,并因此使电流id流过该绝缘电阻。电压设定点值ud优选地低于或等于60v,例如,在0v到24v之间。
[0052]
检测电路4还包括第一电阻器42(称为限流电阻器42),该限流电阻器与dc电压源41串联连接在电池的端子hv-与车身之间。更确切地,限流电阻器42连接在端子hv-与dc电压源41之间。该限流电阻器42使得可以确保电池1与检测电路4的其余部分之间更好的绝缘,从而防止电流id的值过高而对使用者造成危险。由rd表示的该限流电阻器42的值例如被选择为尽可能低以便有助于电流id的测量,同时被选择为足够高以便不会损坏检测电路4的电绝缘。rd的值将优选地被选择为比异常绝缘电阻的值ri高(例如是其五倍高,或者甚至是其10倍高),例如,对于400v的电压,该异常绝缘电阻的值ri为100kω的量级,从而导致4ma的最大可接受电流(为人身安全而普遍接受的最高最大可接受电流为10ma的量级)。例如,限流电阻器的值rd因此等于500kω。
[0053]
检测电路4还包括用于测量流过电池的端子hv-和绝缘电阻30的电流的设备43。测量设备43包括第二电阻器44(称为测量电阻器44),该测量电阻器的值由rm表示,该测量电阻器与电容为cm的电容器45并联地连接在dc电压源41与限流电阻器42之间。换句话说,dc电压源41、测量电阻器44和限流电阻器42串联连接在车身2与电池的hv-端子之间。当dc电
压源41将电压设定点ud施加到检测电路4时,测量设备44能够测量跨测量电阻器44两端的电压um。因为测量电阻器44的值rm是已知的,所以测量跨测量电阻器44两端的电压um使得可以从中自动推导出电流id的值,该电流流经限流电阻器42以通过电池的端子hv-进入,然后通过绝缘电阻30流到车身2。
[0054]
因此,电压设定点ud的施加产生通过测量设备43和限流电阻器42的电流id。
[0055]
因此,为了估计绝缘电阻30的值ri,控制单元46能够控制由dc电压源41连续施加多个不同的电压设定点ud值,然后能够针对由dc电压源41施加的每个电压设定点值,获取由测量设备43测量的对应电流id的值。然后,控制单元能够基于获取的电流id值和施加的电压设定点ud值自动计算与位于电池上的点3处的绝缘故障相关联的绝缘电阻30的值ri。
[0056]
例如,dc电压源41被控制以使得连续施加两个不同的电压设定点值(由u
d1
和u
d2
表示)。这些电压设定点值u
d1
和u
d2
中的每一个对应于跨测量电阻器rm两端的电压的测量值(分别由u
m1
和u
mm2
表示)。
[0057]
因此,绝缘电阻30的值ri和该绝缘电阻相对于电池的端子hv-的位置α根据以下等式来计算,其中假定电池的总电压u
bat
在施加电压设定点值的每次迭代中是恒定的:
[0058][0059][0060]
如果需要考虑电压u
bat
的变化,这些等式变为:
[0061][0062][0063]ubatl
和u
bat2
分别是连续施加两个电压设定点u
d1
和u
d2
时考虑的电池电压。
[0064]
由于跨测量电阻器rm两端的电压um的测量通常是有噪声的,因此不直接使用等式(1)和(2)或(3)和(4)。根据本发明,这些等式由在已知的递归最小二乘(rls)模型上运行的两个相应的自适应算法处理,这些算法能够提供两个量ri和α中的每一个的稳定估计值。因此,检测电路的控制单元能够定期向电池管理系统(bms)提供牵引系统的电绝缘状态的可靠指示,从而允许在观察到绝缘故障时采取必要的措施。
[0065]
现在将更详细地描述通过递归最小二乘(rls)法实现这种自适应滤波的示例性实施例,该自适应滤波一方面用于估计绝缘电阻,另一方面用于估计电池中绝缘故障的位置。
[0066]
首先,回想实施rls算法的等式。以下仅考虑对信号进行采样的离散情况,索引k代表量的当前值的索引。
[0067]
通常,该算法可以用于估计输入信号u(k)和输出信号y(k)的离散传递函数h(z)的系数ai和bi:
[0068][0069]
因此,这是一个寻找“最佳”滤波器的问题,也就是说,当输入是给定序列u(k)时,该滤波器可以在输出端获得“最接近”期望响应的响应y(k)。该自适应滤波包括滤波器系数的递归更新。因此,该算法从预定的初始条件开始并递归地修改滤波器的系数以适应该过
程。
[0070]
每个rls算法的主要步骤是:
[0071]
1.初始化步骤:0<λ≤1;c(o)=c0;θ(0)=0;
[0072]
c(k)是该算法的输入量的协方差矩阵,在初始时间k=0时等于c0。λ是遗忘因子参数。θ(k)是要估计的滤波器系数的向量,在初始时间k=0时取为等于0。
[0073]
2.预测步骤:
[0074]
是对应于要最小化的标准的预测误差。在本案中,寻求最小化在算法输出端产生的信号的当前值y(k)与通过估计系数为θ(k-1)的传递函数对信号的过去值进行滤波的结果之间的差异。x
t
(k)表示如下定义的向量x(k)的转置向量:
[0075]
x(k)=[u(k)u(k-1)...u(k-nb)-y(k-1)...-y(k-na)]
t
[0076]
并且
[0077]
θ(k)=[b
0 b
1 ... b
nb a
1 ... a
na
]
t
[0078]
3.计算最优增益的步骤:
[0079]
l(k)=c(k-1)
·
x(k)
·
[λ+x
t
(k)
·
c(k-1)
·
x(k)]-1
[0080]
4.更新滤波器系数的向量θ(k)的估计值的步骤:
[0081][0082]
滤波器系数的这种适应是基于预测误差执行的,这因此使得可以计算滤波系数的更新。
[0083]
5.更新协方差矩阵c(k)的步骤:
[0084][0085]
在目标阻抗为纯电阻的稳定状态下,上面定义的等式(5)变为:
[0086]
h(z)=b0[0087]
换句话说,自适应算法的目的是在自适应算法的两个不同实施方式中提供滤波器系数的向量的估计值,以便从中推导出值ri和α,该估计值在此由单个参数组成,该参数对应于等式(5)的传递函数h(z)的静态增益b0。
[0088]
第一种实施方式用于估计绝缘电阻的值ri。如上所述,取决于是否考虑电池电压ubat的变化,可能出现两种情况。因此,在电池电压ubat的变化被忽略的第一种情况下,通过考虑输入信号u(k)和输出信号y(k)的传递函数h(z)来评估等式(5)的传递函数h(z)的静态增益b0,该输入信号和该输出信号定义如下:
[0089]
u(k)=u
d2
(k)-u
d1
(k)=δud(k)
[0090]
y(k)=u
m2
(k)-u
m1
(k)=δum(k)
[0091]
因此,用于更新估计值的等式为:
[0092][0093]
其中:
[0094][0095][0096]
算法收敛后,得到:
[0097][0098]
基于等式(1),估计的绝缘电阻ri计算如下(7):
[0099][0100]
在考虑电池电压u
bat
的变化的第二种情况下,以与第一种情况相同的方式评估等式(5)的传递函数h(z)的静态增益b0,但传递函数h(z)考虑以下输入信号:
[0101][0102]
自适应算法的第二种实施方式用于估计值α,该值对应于绝缘故障相对于电池端子hv-的位置。与估计绝缘电阻的值一样,取决于是否考虑电池电压u
bat
的变化,可能出现两种情况。因此,在电池电压ubat的变化被忽略的第一种情况下,用传递函数h(z)的输入信号u(k)和输出信号y(k)来实施自适应算法的步骤1.至步骤5.,该输入信号和该输出信号定义如下:
[0103]
u(k)=u
bat
·
(u
m2-u
m1
)并且
[0104]
y(k)=u
m1ud2-u
d1um2
[0105]
在算法收敛之后,滤波器系数的向量的估计值提供了值α的估计值。
[0106]
对于考虑电池电压u
bat
变的化的情况,这次用传递函数h(z)的输入信号u(k)和输出信号y(k)来实施用于估计的自适应算法的步骤1.至步骤5.,该输入信号和该输出信号定义如下:
[0107]
u(k)=u
m2
·ubat1-u
m1
·ubat2
并且
[0108]
y(k)=u
m1ud2-u
d1um2
[0109]
无论是估计绝缘电阻值还是估计绝缘故障位置,实施rls型自适应算法都具有仅有一个设置参数的优点。该代表遗忘因子λ的设置参数在上面的等式中定义。该参数的值介于0到1之间,使得可以在协方差矩阵中给予前面的样本更大或更小的重要性。因此,为了优化算法的收敛速度同时保持误差最小化,该参数的参数化是必不可少的。
[0110]
使用rls型自适应算法估计绝缘电阻的另一个优点是它允许优化计算成本,因为它不需要矩阵求逆。因此,其允许集成该估计功能,而无需增加bms中的计算能力,并且因此不会由于这种仍然必不可少的功能而产生任何额外的成本。
[0111]
为了避免不稳定,仅当满足以下条件时才激活对绝缘电阻ri值的估计值的更新:
[0112]
|δum(k)|>δu
m_min
[0113]
该条件允许算法对测量噪声具有鲁棒性,并确保电压ud和um的同步;
[0114]
δum(k).δum(k-1)≥0
[0115]
该条件允许算法对突然转换具有鲁棒性。
[0116]
|δu
bat
(k)|<δu
bat_max
[0117]
该条件使得算法对总电池电压的变化具有鲁棒性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1