大表面的反射傅立叶叠层成像术的制作方法
大表面的反射傅立叶叠层成像术
优先权主张
1.本技术要求于2019年12月2日申请的、名称为“reflective fourier ptychography imaging of large surfaces”的美国专利申请序列号62/942,636的优先权利益,其全部内容都通过引用合并于此。
技术领域
2.所公开的主题通常涉及检测表面和近表面上的缺陷(亚表面缺陷)的领域。更具体地,所公开的主题涉及使用反射傅立叶叠层成像术系统的缺陷自动检测。
背景技术:
3.用于表面的同时代相机检测技术要么使用具有大视场和低分辨率的昂贵相机,要么使用具有高放大率和高分辨率但耦合小视场的系统。例如,当前的机器视觉技术无法以足够的分辨率及时检查整个部件的表面(其面积例如可以为约0.25m2)。
4.利用透射模式技术的一种现有技术系统允许高放大率技术,同时使用具有小数值孔径的收集光学器件,从而允许对更大的图像区域进行采样。参考图1,现有技术的透射模式傅立叶叠层成像显微(tfpm)装置100的简化图被显示为具有可编程led阵列110形式的多路复用照明。tfpm装置100使用传统的明场显微镜120,其具有作为光源的可编程led阵列110。可编程led阵列110允许在样品103的傅立叶平面109处对照明101进行有针对性的图案化。来自样品103的光105被引导通过明场显微镜120的第一光学透镜107和第二光学透镜111。透射光113由成像设备115接收。成像设备115可以包括相机。从成像设备115获得的图像数据电耦合到计算设备117。图像数据从成像设备115传送到计算设备117,以用于处理并且最终显示在监视器(未示出)上。
5.led阵列110包括可编程控制器(未示出,但本领域普通技术人员可以理解),其被配置为随着时间的变化,以预定的图案和时间顺序照亮布置在led阵列110的面上的一个或多个发光二极管。因此,图1的示意图示出了使用傅立叶叠层成像术的现有技术系统,其使得人们能够使用具有大视场(fov)的低数值孔径(na)物镜。即使使用低na物镜,由于各种光源和产生的光图案,傅立叶叠层成像术装置也能够在整个图像上获得高水平的分辨率。除了所示的led阵列110之外,傅立叶叠层成像显微镜装置的各种现有技术示例还使用可以相对于样本倾斜和重新定位的照明源(例如led)。
6.然而,即使tfpm装置100和类似的现有技术装置对于透射型显微镜具有许多有用的应用,但tfpm装置100仅对允许光透过的物体(例如,生物样本)有用)。因此,tfpm装置100不适用于反射显微镜和成像技术。此外,tfpm装置100不容易适用于扫描具有如上所述表面积的大样本。
7.提供本节中描述的信息是为了向技术人员提供以下公开主题的背景,不应将其视为公认的现有技术。
附图说明
8.图1示出了具有可编程led阵列形式的多路复用照明的现有技术的透射模式傅立叶叠层成像显微镜装置的简化图;
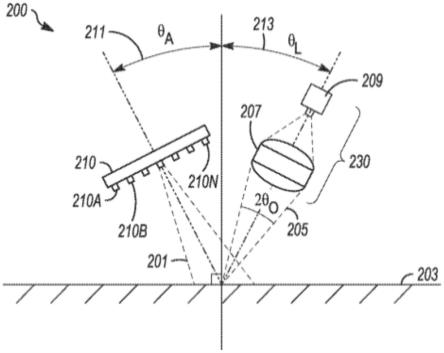
9.图2示出了根据所公开主题的多种实施方案的反射模式傅立叶叠层成像显微镜(rfpm)装置的示意图的示例性实施方案;
10.图3a示出了根据所公开的主题的多种实施方案的rfpm装置的图的另一示例性实施方案;以及
11.图3b和3c示出了可以与图3a的rfpm装置一起使用的光源布置的示例性实施方案。
具体实施方式
12.以下描述包括体现所公开的主题的各个方面的说明性示例、设备和装置。在以下描述中,出于解释的目的,阐述了许多具体细节以提供对本发明的主题的多种实施方案的理解。然而,对于本领域技术人员来说,显而易见的是,可以在没有这些具体细节的情况下实践所公开的主题的多种实施方案。此外,没有详细示出公知的结构、材料和技术,以免混淆各种图示的实施方案。
13.下面讨论的各种示例性实施方案集中在反射模式傅立叶叠层成像显微镜(rfpm)装置上。在阅读和理解本文提供的公开内容后,本领域普通技术人员将容易理解,各种技术、设计和示例都可以以各种组合应用。作为对该主题的介绍,将在以下段落中简要和概括地描述几个实施方案,然后将参照附图进行更详细的描述。
14.制造商用于检查部件的当前检查系统和方法依赖于包括现有技术中的用于检测部件中的大缺陷(例如,“直径”约为500μm或更大)的人工检查和检查部件表面的小部分以检测小缺陷(例如,大约10μm或更大)的机器检查两者的技术。各种制造商(例如,半导体工艺和计量工具的制造商)使用的这些检查系统和方法通常只检查部件表面的约0.0003%至约0.0007%,并使用这个小样本来推断和假设关于整个部件的质量。部件的该检查的小部分仅给出了约2%到约4%的置信度,即检查的表面代表部件的实际质量状态。当代系统和方法仅检查部件的很小部分的原因是基于光学器件的物理学,如下面简要描述的。
15.如本领域普通技术人员所理解的,基于显微镜的检查系统通常使用显微镜物镜来收集透过物体的光或从物体反射的光。熟练的技术人员认识到,瑞利分辨率极限lr(显微镜可以分辨的特征有多小)基于以下等式:式中λ是用于照亮物体的光的波长,na是显微镜物镜的数值孔径。na与透镜和物体之间的介质的折射率以及进入透镜的光角有关:na=n
·
sinθ其中n是镜片工作所在的介质的折射率(例如,n对于空气,约等于1.00,对于水,约等于1.33,并且对于高折射率浸油约等于1.52);并且θ是可以进入(或退出)物镜的光锥的最大半角。因此,随着数值孔径na的增加,分辨率极限lr会降低,从而可以检查较小的特征,例如缺陷。
16.然而,随着na增大,景深(例如图像深度)和可视区域显著减小。例如,根据以下等
式,景深dof随数值孔径na的平方的增大而减小:因此,随着分辨率极限的降低(允许对越来越小的特征尺寸进行询问),景深减小得更快。可视区域也相应减少。因此,所公开的主题提出了一种允许询问小特征但具有大景深和大检查区域的系统。
17.例如,所公开的主题的装置和方法可以在小于约30分钟内以与现有技术的基于标准显微镜的系统相似的分辨率检查部件的整个表面,从而给出比上述采样的约0.0003%至约0.0007%提高13,000倍的效率,从而提供高达约95%至约99.9997%置信水平的测量置信度的显著提高。
18.所公开的主题的多种实施方案以反射模式操作以检查例如硬质表面(例如,非生物,例如无机或非有机物质)。表面可以包括例如各种金属(例如铝或不锈钢)、陶瓷(例如氧化铝、al2o3)表面、陶瓷涂层表面、元素和化合物半导体衬底表面、各种类型的塑料、玻璃表面(本领域已知的各种类型)、阳极氧化表面、和氧化表面,但是可以使用所公开的主题的实施方案检查许多其他类型的表面和材料。在一个示例中,该部件的直径(或其他特征面积尺寸)可以是约559mm(约22英寸,在一侧具有约0.25m2的表面积),并且可以检查该部件的特征尺寸为约5μm至约10μm或更大的缺陷。在其他实施方案中,可以在高达几平方米的面积上检查部件的特征尺寸为约5μm至约10μm和更大的缺陷。
19.所公开的主题的多种实施方案也可用于例如识别材料内的材料组成变化、晶体结构变化或晶界。具有不同组成或不同晶体结构的材料具有作为材料特性的不同的折射率。折射率会影响光如何反射并通过材料折射。因此,各种折射率会产生不同强度的光,其照射在传感器上,从而使得能检测例如组成或结构边界。此外,如果材料(例如陶瓷或金属)的晶粒尺寸在微米量级,则通常需要更高放大倍率才能观察的晶界和其他缺陷可使用所公开的主题的多种实施方案来检测。此外,从多个光角度在晶界处散射的光可以产生识别晶界信息的图像,以及范围比传统光学器件可以检测或识别的更大的更大缺陷。
20.所公开的主题利用具有大视场同时仍获得高分辨率的相机。所述装置的实施方案使用空间上产生和时间上产生的多个角度的入射光,然后通过计算方式组合这些入射光以提高分辨率,同时在要检查的部件的大表面区域上这样做。由于大量入射光束照射在被检测的部件的表面上,来自典型的单一高强度光束的伪影也会减少或消除。所公开的装置可以使用统计数据和机器学习来仅询问表面的一部分,同时对整个表面的质量具有高置信度。此外,可以用各种类型的透镜(例如,物镜)和波长来修改所公开的主题的多种实施方案,以满足需要它的特定应用。此外,本文所述的多种实施方案可以自动扫描整个表面。例如,在一个实施方案中,为了增加被检查的表面面积,rfpm设备可以进行光栅扫描或以其他方式移动到被检查表面的不同部分。在另一实施方案中,该表面可以相对于rfpm设备平移。在其他实施方案中,rfpm装置被光栅扫描并且表面同时相对于rfpm设备平移。此外,多种实施方案可以具有用于可通过组件的预定标准,从而消除了对操作员检测到的一个或多个缺陷进行解释的需要。
21.在一个具体的示例性实施方案中,所公开的主题包括反射模式傅立叶叠层显微术(rfpm)装置。rfpm装置利用多组件光源(例如,led阵列或其他辐射源)、包含收集光学器件
以接收来自正在检查的物体的镜面反射光和散射光(从表面反射或以其他方式重定向的光)的透镜、以及反射光传感器以反射模式运行。在多种实施方案中,反射光传感器可以偏移垂直线(正交于表面的方向)一定度数。该系统在明场成像和暗场成像中拍摄具有不同照明条件(例如,多组件光源的半圆照明)的多个图像,以对表面的图像的傅立叶空间进行采样。然后这些图像经过计算重建和叠加,以提高分辨率并减少像差。重建后,使用机器学习算法检查图像是否存在缺陷,并根据预定标准确定部件质量。
22.现在参考图2,示出了根据所公开的主题的多种实施方案的反射模式傅立叶叠层成像显微镜(rfpm)装置200的示意图的示例性实施方案。rfpm装置200被显示为包括光源阵列210、收集光学器件230和样品表面203。光源阵列210包括多个单独的光源210a、210b、...、210n。在多种实施方案中,单独的光源210a、210b、.....、210n各自可以包括多个基本上单色的光源。光源阵列210可以包括具有一种或多种波长、一种或多种偏振态或其他特性的单独的光源。在特定示例性实施方案中,单独的光源210a、210b、...、210n包括特定波长的单独的led、或各自可针对相关色温(cct)或包括不可见颜色(例如紫外线或红外线)的波长范围进行调节的led簇。在多种实施方案中,单独的光源可以包括具有延伸到紫外范围深处的波长的其他类型的不可见光源。不管使用的光的类型如何,每个单独的光源210a、210b、...、210n是可编程的并且能够单独激活(打开或关闭)。
23.收集光学器件230包括成像透镜207和传感器元件209。虽然成像透镜207显示为双凸透镜,但不暗示这样的限制,因为成像透镜207可以包括各种透镜或透镜组中的一个或者多个,如本领域已知的。成像透镜207被显示为具有进入镜头的全角光锥205。在特定示例性实施方案中,成像透镜207可以被替换或与其他光学元件(例如镜子)结合使用。在特定示例性实施方案中,收集光学器件230包括显微镜物镜。传感器元件209可以包括本领域已知的将接收到的光能转换成电信号输出的各种类型的光敏元件(例如,光电检测器)。在特定的示例性实施方案中,传感器元件209包括ccd阵列。
24.光源阵列210可以相对于样品表面203以角度211放置。角度211可以是固定的或可变的,具体取决于本领域普通技术人员可以理解的许多因素。在多种实施方案中,角度211可以为或接近0
°
至约2
°
、至约3
°
、至约5
°
或更大。此外,每个单独的光源210a、210b、.....210n、210n可以具有不同量的光束扩展201。光束扩展可以是0
°
或接近0
°
(例如,对于激光或led源),或者对于其他类型的光源可以大于0
°
。
25.收集光学器件230可以相对于样品表面203成角度213放置。角度213可以是固定的或可变的,具体取决于本领域普通技术人员可以理解的许多因素。在多种实施方案中,角度213可以为或接近0
°
至约2
°
、至约3
°
、至约5
°
或更大。在特定示例性实施方案中,角度213大约等于光源阵列210的角度211。rfpm装置200的收集光学器件230收集从样品表面203向收集光学器件230反射或散射回的反射。
26.因此,一系列图像中的每一个都是由于来自例如相干光源的照明而被捕获的。然而,由于多个光源,存在多个入射角,其中许多基本同时可用。rfpm装置200可以采用光的各种类型的时间或空间图案化来收集一系列图像。
27.因此,使用图2的相同光学设置来实现各种成像模式,在没有移动部件的多种实施方案中,仅通过选择光源阵列210内的单独的光源210a、210b、...、210n(例如,led)中的将根据预定义的时间和空间图案来激活(打开和关闭)的适当的单独的光源。因此,光源阵列
210内的单独的光源中的每个光源或单独的光源中的多个光源的图案对应于以独特角度或角度范围照射样品表面203。因此,可以图案化的照明角度范围远大于通过收集光学器件230的角度范围,因此不由收集光学器件230的数值孔径设定。结果,由靠近光源阵列210的中心区域的单独的光源对样品表面203的照射产生明场图像,而靠近光源阵列210的外周边(收集光学器件230的数值孔径的外部)的单独的光源对样品表面203的照射产生暗场图像。明场图像和暗场图像是本领域普通技术人员已知和理解的。
28.用例如光源阵列210的任一半上的led依次拍摄成对的图像(例如,跨越选定的对称线),使得rfpm装置200能通过差分相衬(dpc)技术获得相位导数测量结果。使用dpc技术,获得来自用来自光源阵列210的不同源图案捕获的图像的定量相位差。因此,定量相位从例如如用互补的不对称照明图案拍摄的两个图像中恢复。两个图像之间的差异与样本表面203沿不对称轴的相位导数有关。因此,dpc技术是一种部分相干成像技术(仅来自单个led的照明构成相干光源)。由于可以使用光源阵列210实现的各种图案化技术,因此dpc测量可以在rfpm装置200中基本上实时地并且沿着多个不对称轴实现,而不使用任何可移动组件。因此,在rfptm设备的照明侧(光源阵列210侧)或检测(背反射或散射)侧(收集光学器件230侧)没有任何机械改变的情况下,实施dpc技术是可能的。因此,可以开发光源阵列210的各种照明策略以适应不同类型的样本和成像需求。
29.本领域普通技术人员认识到,在光学器件和光散射的一般技术中,可以通过获取多个图像的一个或多个相位差来提取高度信息,并且使用该信息来提取高度特征(例如,缺陷的特征高度尺寸)。例如,在使用明场图像的反射显微镜中,可以拍摄两个半月形照明(例如,左、右或上、下)。在离轴照明情况下,相位将随对比度基本上线性变化。然而,在单个图像中,相位信息和幅度信息都在结果信号中不可分割地卷积,因此,不能从信号中单独提取相位。来自不同角度的多个图像将具有相同的幅度对比度但不同的相位对比度。因此,当拍摄图像之间的差异时,可以隔离相位对比度。
30.相位与反射模式下的高度或深度通过以下等式相关:其中是接收的信号的相位,kz是z方向上的波矢量,h是感兴趣特征的高度。波矢量kz可以由下式确定:其中θ是成像轴和照明点之间的角度(如果是直线向上和向下,则它是竖直线与led所在位置之间的角度)并且λ是光的波长。因此,如果可以通过图像确定相位,已知照明角度和光波长,则可以确定相对高度图。这将指示缺陷是高于还是低于部件的一般平坦平面或以下。
31.上面提供的描述通常适用于单次反射(非传输信号),尽管类似的数学集虽然更复杂,但可用于从传输信号中提取类似信息。在固体表面上的透明涂层的情况下,可能会遇到各种类型的反射。然而,本领域普通技术人员将认识到这样的反射如何可以包括在上面给出的等式中。
32.现在参考图3a,示出了根据所公开的主题的多种实施方案的rfpm装置300的示意
图的另一示例性实施方案。rfpm装置300被显示为包括左侧光源阵列310l和右侧光源阵列310r。光源阵列310l、310r中的每一个包括多个单独的光源(未示出,但可以与图2的光源阵列210相同或相似)。左侧光源阵列310l和右侧光源阵列310r可以分别处于一个或多个角度301l和301r处。左侧光源阵列310l和右侧光源阵列310r中的每一个可以在相对于相对侧的角度不同的一个或多个角度301l和301r处。左侧光源阵列310l和右侧光源阵列310r中的每一者的各自的角度301l和301r可以是固定的或可变的。此外,尽管未明确示出,rfpm装置300可以包括分束器元件,使得光源阵列310l、310r中的至少一个可以布置成与收集光学器件230的光束路径基本正交。这样的分束器设计在相关领域中是已知的。在其他实施方案中,光源阵列可以围绕收集光学器件230并且位于容纳收集光学器件230的设备中。尽管图3a暗示左侧光源阵列310l和右侧光源阵列310r是平面元件,但是不应该推断出这样的限制,如下文参考图3b和3c所讨论的。
33.图3b和3c示出了可以与图3a的rfpm装置300一起使用的光源布置的示例性实施方案。图3b示出了具有多个单独的光源330a、330b、...、330n的光源阵列330的布置320。因此,示出了最下部(例如,最接近表面的光源阵列330的下侧)。单独的光源330a、330b、...、330n的相邻行之间的角度331可以基于给定尺寸和待检查表面的其他特性所需的光源中的多个单独的光源来确定。尽管角度331被示出为具有相邻行的单独的光源330a、330b、...、330n彼此间隔大约45
°
,但不应推断出对角度331的这种限制。
34.此外,单独的光源330a、330b、...、330n不得排列成线性阵列。单独的光源可以布置成各种空间周期性和非空间周期性(包括随机)阵列。例如,在特定的示例性实施方案中,单独的光源布置成一系列同心圆,其中每个相邻行具有与前一行或后续行相同数量的单独的光源。在另一特定示例性实施方案中,单独的光源布置成一系列同心圆中,其中每个相邻行具有比前一行或后续行更多或更少数量的单独的光源。在又一特定示例性实施方案中,单独的光源布置成阿基米德螺线或其他几何布置。此外,光源阵列330可以包括局部平面(例如,从阵列的内周到外周)。在其他实施方案中,光源阵列330可以包括凹面或凸面,或列出或考虑的任何几何组合。
35.例如,图3b示出了图3a的rfpm装置300的布置的三维侧视图340。在该侧视图中,rfpm装置300被显示为具有基本上截头圆锥形的形状。角度341可以从0
°
或接近0
°
至45
°
或更大。
36.基于阅读和理解所公开的主题,本领域普通技术人员将认识到,rfpm装置的各个实施方案中的每一个都可用于测量各种材料表面上以及大的表面面积(例如,从几分之一平方米到几平方米或更多)上的各种尺寸的缺陷。在非常大的表面的情况下,rfpm装置可以安装在相关领域中已知的各种类型的平移台(例如,x-y台或r-θ台)上。在其他实施方案中,样本本身可以相对于rfpm装置平移。在又一些实施方案中,样本和rfpm装置都可以相对于彼此平移。然后可以通过例如软件来处理和缝合得到的获取图像中的每一个,以形成单个图像。检测到的缺陷的尺寸范围可以是检测到的缺陷的特征尺寸的约50nm至约50mm。可以检测每单位面积检测到的缺陷的总数(例如,超过预定尺寸,例如约5μm或约10μm)。此外,多种实施方案可用于确定表面的全部或部分的总体粗糙度水平(例如,rms-粗糙度值,r
rms
)。
37.在还有的其他实施方案中,未明确显示但本领域普通技术人员可以理解,基于阅读和理解所公开的主题,所公开的主题的多种实施方案也可用于半导体制造的各种处理阶
段。例如,所公开的主题可以在原位、在沉积处理室内或附近使用,以在一个或多个膜被沉积在衬底(例如,硅晶片)上时监测缺陷、薄膜厚度和膜粗糙度水平。然后可以将来自这种原位处理监测的结果以基本实时的方式报告给最终用户,或者作为一系列时间图像获取和报告。
38.使用本文公开的多种实施方案中的一个或多个,使用rfpm的多种实施方案的一种实施方案包括,例如,(1)rfpm的操作者手动将要检查的部件装载到固定部件的方位的夹具上;(2)操作者选择并启动程序以运行和控制上述rfpm的至少一些方面,该程序可以以人机界面或其他图形用户界面运行;(3)rfpm在整个部件表面或整个预定部分(例如,在指定位置取样的部件的给定百分比)上自动捕获部件的图像(例如,可以基本同时检测1μm和更大的500μm的缺陷));(4)一旦收集到所请求的数据,就使用相关领域已知的计算方法对图像进行处理,其中例如使用机器学习来分析和量化缺陷;以及(5)基于成组预定的输入(例如,每单位面积的预定尺寸或大于预定尺寸的缺陷数量、被扫描的部件的一部分或全部的粗糙度水平,以及本文所述的其他输入和参数),程序计算机根据程序和分析的缺陷确定部件是否通过或未通过检查。
39.如上所述的这种方法可以在各种类型的设备上运行,如下面更详细描述的。例如,这些设备包括计算机或微处理器、专用处理器,例如现场可编程门阵列(fpga)或以软件、固件或作为硬件实现编程的专用集成电路(asic),其具有上述公开的主题的一个或多个方面。
40.在整个本说明书中,多个实例可以实现描述为单个实例的组件、操作或结构。尽管一种或多种方法的单独的操作被图示和描述为分开的操作,但是可以同时执行单独的操作中的一个或多个,并且没有要求以所示的顺序执行这些操作。在示例性配置中呈现为分开的组件的结构和功能可以实现为组合的结构或组件。类似地,作为单个组件呈现的结构和功能可以实现为分开的组件。这些和其他变化、修改、添加和改进落入本文主题的范围内。
41.本文将某些实施方案描述为包括逻辑或多个组件、模块或机制。模块可以构成软件模块(例如,包含在机器可读介质或传输信号中的代码)或硬件模块。“硬件模块”是能够执行某些操作的有形单元,并且可以以某种物理方式配置或布置。在多种实施方案中,一个或多个计算机系统(例如,独立计算机系统、客户端计算机系统或服务器计算机系统)或计算机系统的一个或多个硬件模块(例如,处理器或成组的处理器)可以由软件(例如,应用程序或应用程序部分)配置为硬件模块,该硬件模块进行操作以执行如本文所述的某些操作。
42.在一些实施方案中,硬件模块可以通过机械方式、电子方式或它们的任何合适的组合来实现。例如,硬件模块可以包括永久配置为执行某些操作的专用电路或逻辑。例如,硬件模块可以是专用处理器,例如现场可编程门阵列(fpga)或asic。
43.硬件模块还可以包括由软件临时配置以执行某些操作的可编程逻辑或电路。例如,硬件模块可以包括包含在通用处理器或其他可编程处理器内的软件。应当理解,以机械方式、在专用和永久配置的电路中或在临时配置的电路(例如,由软件配置)中实现硬件模块的决定可能受成本和时间考虑因素的驱动。
44.因此,短语“硬件模块”应理解为包含有形实体,即物理构造、永久配置(例如,硬连
线)或临时配置(例如,编程)以按特定方式操作或以执行此处描述的某些操作的实体。如本文所使用的,“硬件实现的模块”指的是硬件模块。考虑到临时配置(例如,编程)硬件模块的实施方案,每个硬件模块不需要在任何一种情况下被及时配置或实例化。例如,在硬件模块包括通过软件配置成为专用处理器的通用处理器的情况下,通用处理器可以在不同时间分别被配置为不同的专用处理器(例如,包括不同的硬件模块)。软件可以相应地配置处理器,例如,以在一个时间实例中构成特定硬件模块并且在不同时间实例中构成不同的硬件模块。
45.硬件模块可以向其他硬件模块提供信息,以及从其他硬件模块接收信息。因此,所描述的硬件模块可以被认为是通信耦合的。在同时存在多个硬件模块的情况下,可以通过硬件模块中的两个或更多个之间的信号传输(例如,通过适当的电路和总线)来实现通信。在多个硬件模块在不同时间被配置或实例化的实施方案中,这些硬件模块之间的通信可以例如通过在多个硬件模块有访问权的存储器结构中存储和检索信息来实现。例如,一个硬件模块可以执行操作并将该操作的输出存储在与其通信耦合的存储器设备中。然后,另一个硬件模块可以在稍后时间访问存储设备以检索和处理存储的输出。硬件模块还可以启动与输入或输出设备的通信,并且可以对资源(例如,信息集合)进行操作。
46.本文描述的示例性方法的各种操作可以至少部分地由一个或多个处理器执行,这些处理器被(例如,通过软件)临时配置或永久配置为执行相关操作。无论是临时配置的还是永久配置的,这样的处理器都可以构成处理器实现的模块,这些模块操作以执行本文描述的一个或多个操作或功能。如本文所使用的,“处理器实现的模块”是指使用一个或多个处理器实现的硬件模块。
47.类似地,本文描述的方法可以至少部分地由处理器实现,处理器是硬件的示例。例如,一种方法的至少一些操作可以由一个或多个处理器或处理器实现的模块来执行。此外,一个或多个处理器还可操作以支持“云计算”环境中的相关操作的性能或作为“软件即服务”(saas)。例如,至少一些操作可以由成组的计算机(作为包括处理器的机器的示例)执行,其中这些操作可通过网络(例如,互联网)以及通过一个或多个适当的接口(例如,应用程序接口(api))访问。
48.操作中的某些的性能可以分布在一个或多个处理器中,不仅驻留在单个机器内,而且部署在多台机器上。在一些实施方案中,一个或多个处理器或处理器实现的模块可以位于单个地理位置(例如,在家庭环境、办公室环境或服务器场内)。在其他实施方案中,一个或多个处理器或处理器实现的模块可以分布在多个地理位置。
49.如本文所使用的,术语“或”可以被解释为包容性或排他性的意义。此外,本领域普通技术人员在阅读和理解所提供的公开内容后将理解其他实施方案。此外,在阅读和理解本文提供的公开内容后,本领域普通技术人员将容易理解本文提供的技术和示例的各种组合都可以以各种组合应用。
50.尽管单独讨论了多种实施方案,但这些单独的实施方案并不旨在被视为独立的技术或设计。如上所述,各个部分中的每一个都可以是相互关联的,并且每一个可以单独使用或与本文讨论的反射傅立叶叠层成像术系统的其他实施方案结合使用。例如,虽然已经描述了方法、操作和处理的多种实施方案,但是这些方法、操作和处理可以单独使用或以各种组合使用。
51.因此,可以进行许多修改和变化,这对于本领域普通技术人员在阅读和理解本文提供的公开内容后将是显而易见的。除了在此列举的那些之外,在本公开范围内的功能等效的方法和设备对于本领域技术人员来说根据前面的描述将是显而易见的。一些实施方案的部分和特征可以被包括在其他实施方案的那些中,或被其他实施方案的那些部分和特征替代。这样的修改和变化旨在落入所附权利要求的范围内。因此,本公开仅受所附权利要求的术语以及这些权利要求所享有的等同方案的全部范围的限制。还应理解,本文使用的术语仅出于描述特定实施方案的目的,并不旨在进行限制。
52.提供本公开的摘要是为了让读者能够快速确定技术公开的性质。提交摘要时理解它不会用于解释或限制权利要求。此外,在前述详细描述中,可以看出,为了简化公开的目的,可以在单个实施方案中将各种特征组合在一起。该公开的方法不应被解释为限制权利要求。因此,以下权利要求在此并入详细说明中,每个权利要求作为单独的实施方案独立存在。以下带编号的示例是所公开主题的具体实施方案
53.示例1:所公开的主题的实施方案描述了一种操作反射模式傅立叶叠层成像显微镜(rfpm)以检测部件表面上的缺陷的方法。该方法包括:将所述部件装载到所述rfpm的保持夹具上;从被配置为将辐射引导到所述表面上的多组件光源产生至少一个照明图案,所述多组件光源具有多个单独的光源,所述多个单独的光源中的每一个被配置为单独地被激活,所述至少一个照明图案选自包括时间图案和空间图案的多个图案;在传感器元件中收集从所述表面重定向的辐射;通过微分相位对比(dpc)技术从由所述传感器元件收集的所述辐射中获得相位导数测量;确定从所述表面到所述传感器元件的成像轴之间的角度;以及至少确定所述表面上的一个或多个缺陷的高度特征。
54.示例2:根据示例1所述的方法,其还包括在所述表面的区域上光栅扫描所生成的所述至少一个照明图案。
55.示例3:根据示例1或示例2所述的方法,其还包括通过移动在所生成的所述至少一个照明图案下方的所述部件来在所述表面的区域上执行光栅扫描。
56.示例4:根据前述示例中的任一个所述的方法,其还包括通过以下方式在所述表面的区域上执行光栅扫描:在所述表面的所述区域上扫描所生成的所述至少一个照明图案;以及移动所生成的所述至少一个照明图案下方的所述部件。
57.示例5:根据前述示例中的任一个所述的方法,其中,所述区域被选择为是在所述表面上的至少约0.25平方米。
58.示例6:根据前述示例中的任一个所述的方法,其还包括为所述多个单独的光源中的选定的光源确定至少一个波长。
59.示例7:根据前述示例中的任一个所述的方法,其中,选择所述至少一个照明图案以便以多个入射角照射所述表面。
60.示例8:根据前述示例中的任一个所述的方法,其中,所述时间图案和所述空间图案是预先确定的。
61.示例9:根据前述示例中的任一个所述的方法,其中选择所述时间图案包括:选择激活所述多个单独的光源中的哪些;以及确定所选择的所述多个单独的光源中的哪些相对于所选择的所述多个单独的光源中的其余光源被及时激活。
62.示例10:根据前述示例中的任一个所述的方法,其中选择所述空间图案包括选择在基本一致的时间段期间激活所述多个单独的光源中的哪些。
63.示例11:根据前述示例中的任一个所述的方法,其还包括确定所产生的所述至少一个照明图案的中点相对于所述表面的法线偏移预定度数的角度,所述预定度数是偏离相对于所述表面的垂直线而言的。
64.示例12:根据前述示例中的任一个所述的方法,其还包括通过计算方式组合从所述表面重定向的所收集的辐射中的至少一种,以对于给定的数值孔径和所述多个单独的光源的光的波长,将检测到的所述缺陷的分辨率提高至超过瑞利分辨率极限。
65.示例13:根据前述示例中的任一个所述的方法,其还包括选择收集光学器件以将所收集的所述辐射从所述预定数值孔径聚焦到所述传感器元件上。
66.示例14:根据前述示例中的任一个所述的方法,其中,所述多组件光源包括led阵列。
67.示例15:根据前述示例中的任一个所述的方法,其中所述产生至少一个照明图案包括选择所述多个单独的光源中的单独的光源以包括来自led阵列的成组的led。
68.示例16:根据前述示例中的任一个所述的方法,其中,所述多个单独的光源中的每一个包括led。
69.示例17:所公开的主题的实施方案描述了一种操作反射模式傅立叶叠层成像显微镜(rfpm)的方法。所述方法包括:将要检查的非生物部件装载到夹具上;以及选择用于运行和控制rfpm的一个或多个方面的程序,所述方面能从包括多组件光源的空间图案、所述多组件光源的时间图案、待检测的缺陷尺寸的范围、待检测的所述部件的区域、一个或多个检测到的缺陷的至少一个高度特征、以及要记录的所述非生物部件的多个图像的方面中选择。
70.示例18:根据示例17所述的方法,其还包括基于所记录的所述图像确定所述部件的所述区域中的至少一部分的粗糙度水平。
71.示例19:根据示例17或示例18所述的方法,其还包括选择待检测的缺陷的尺寸范围。
72.示例20:根据示例17至示例19中的任一个所述的方法,其还包括选择所述多组件光源将辐射引导至所述部件所使用的角度的范围。
73.示例21:根据示例17至示例20中的任一个所述的方法,其中所述非生物部件包括至少一种材料,所述至少一种材料选自包括金属表面、陶瓷表面、陶瓷涂层表面、元素半导体衬底表面、化合物半导体衬底表面、玻璃表面、阳极氧化表面、塑料、以及氧化表面的材料。
74.示例22:根据示例17至示例21中的任一个所述的方法,其中所述待检测的缺陷的尺寸范围包括所检测的所述缺陷的特征尺寸的从约50nm到约50mm的范围。
75.示例23:所公开的主题的实施方案描述了一种操作反射模式傅立叶叠层成像显微镜(rfpm)以检测部件表面上的缺陷的方法。该方法包括:从被配置为将辐射引导到所述表面上的多组件光源产生至少一个照明图案,所述多组件光源具有多个单独的光源,所述多个单独的光源中的每一个被配置为单独地被激活,所述至少一个照明图案选自时间图案和空间图案;使用明场成像和暗场成像两者对所述表面的图像的傅立叶空间进行采样;在传
感器中收集从所述表面重定向的辐射;通过微分相位对比(dpc)技术从由所述传感器收集的所述重定向的辐射获得在所述缺陷附近的区域中的相位导数测量;确定从所述表面到所述传感器的成像轴之间的角度;以及至少确定所述表面上的一个或多个缺陷的高度特征。
76.示例24:根据示例23所述的方法,其中,在高达数平方米的区域上,所检测到的所述缺陷的特征尺寸在尺度上为约5μm以及更大。
77.示例25:根据示例23或者示例24所述的方法,其中所述部件是非生物部件。
78.示例26:根据示例25所述的方法,其中所述非生物部件包括至少一种材料,所述至少一种材料选自包括金属表面、陶瓷表面、陶瓷涂层表面、元素半导体衬底表面、化合物半导体衬底表面、玻璃表面、阳极氧化表面、塑料、以及氧化表面的材料。
79.示例27:根据示例23至示例26中的任一个所述的方法,其中,所述空间图案被选择为在所选择的空间图案的时间段期间以多个入射角基本同时照射所述表面。
80.示例28:根据示例23至示例27中的任一个所述的方法,其中选择所述时间图案包括:选择激活所述多个单独的光源中的哪些;以及确定所选择的所述多个单独的光源中的哪些相对于所选择的所述多个单独的光源中的其余光源被及时激活。
81.示例29:根据示例23至示例28中的任一个所述的方法,其中选择所述空间图案包括选择在基本一致的时间段期间激活所述多个单独的光源中的哪些。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1