冗余旋转变压器及搭载有冗余旋转变压器的电动助力转向装置的制作方法
1.本技术涉及冗余旋转变压器及搭载了冗余旋转变压器的电动助力转向装置。
背景技术:
2.在利用转子和定子的空隙中的磁导的变化的旋转变压器中,已知具有连接到不同的励磁电路的2组励磁绕组的多系统的旋转变压器、即所谓的冗余旋转变压器。
3.例如,在专利文献1中,公开了在具有2个励磁绕组的冗余旋转变压器中,为了减小轴向尺寸而将一个旋转变压器定子沿周方分割,并将其设为第一系统、第二系统从而冗余化。现有技术文献专利文献
4.专利文献1:日本专利第4147930号专利文献2:日本专利特开2009-222435号公报
技术实现要素:
发明所要解决的技术问题
5.然而,专利文献1中,构成第一系统和第二系统的齿的数量是旋转变压器定子的总齿数的半数,因此存在如下问题:与单系统的旋转变压器相比,角度检测精度恶化。
6.为了抑制这样的冗余旋转变压器中的角度检测精度的恶化,公开了将2个旋转变压器在轴线方向上堆叠2级,在一个旋转变压器上仅卷绕第一输出绕组,在另一个旋转变压器上仅卷绕第二输出绕组(例如,参照专利文献2)。然而,专利文献2中,由于经由轴将2个旋转变压器堆叠2级,因此存在如下问题:与单系统旋转变压器相比,轴线方向尺寸增大为2倍。
7.本技术公开了用于解决上述问题的技术,其目的是提供一种冗余旋转变压器,其主系统的角度检测精度较高,而不会大型化。用于解决技术问题的技术手段
8.本技术所公开的冗余旋转变压器包括:旋转变压器主体,该旋转变压器主体具备具有nx(nx为自然数)个凸极的转子、与转子相对且具有ns(ns为3以上的整数)个沿周向配置的齿的定子、以及卷绕于齿的励磁绕组和二相输出绕组;以及励磁电路,该励磁电路对励磁绕组施加电压,将ns个齿中卷绕于nsm(nsm为2以上的整数)个齿的励磁绕组和二相输出绕组设为主系统,将卷绕于ns-nsm个齿的励磁绕组和二相输出绕组设为副系统,所述冗余旋转变压器的特征在于,包括:主系统运算部,该主系统运算部输入有主系统中的所述二相输出绕组的电压,并
运算主系统中的角度;以及副系统运算部,该副系统运算部输入有副系统中的所述二相输出绕组的电压,并运算副系统中的角度,对应于主系统的齿数nsm比对应于副系统的齿数ns-nsm要多。发明效果
9.根据本技术所公开的冗余旋转变压器,通过使构成主系统的定子的齿数比总齿数的半数要多,从而角度检测精度得以提高,而不发生大型化。
附图说明
10.图1是示出将实施方式1所涉及的冗余旋转变压器安装于旋转电机的示例的图。图2是示出控制电路的硬件结构的一个示例的图。图3是示出实施方式1所涉及的冗余旋转变压器的结构的图。图4是实施方式1所涉及的冗余旋转变压器的旋转变压器主体的剖视图。图5是实施方式1所涉及的冗余旋转变压器的定子的剖视图。图6是示出实施方式1所涉及的冗余旋转变压器的励磁绕组的匝数的图。图7是示出实施方式1所涉及的冗余旋转变压器的输出绕组的匝数的图。图8是示出实施方式1所涉及的冗余旋转变压器与比较例的角度检测精度的图。图9是示出实施方式1所涉及的冗余旋转变压器的主系统的齿的数量与角度检测精度的关系的图。图10是示出实施方式2所涉及的冗余旋转变压器的结构的图。图11是示出实施方式2所涉及的冗余旋转变压器的主系统的励磁信号和副系统的励磁信号的图。图12是示出实施方式2所涉及的冗余旋转变压器的主系统的输出信号波形的图。图13是示出实施方式2所涉及的冗余旋转变压器的副系统的输出信号波形的图。图14是实施方式3所涉及的电动助力转向装置的示意性结构图。
具体实施方式
11.以下,参照附图对本实施方式进行说明。另外,在各图中,同一标号表示相同或相当的部分。实施方式1《励磁周期》以下,对实施方式1所涉及的冗余旋转变压器进行说明。图1是示出将本实施方式1所涉及的冗余旋转变压器1安装于旋转电机的示例的图。另外,虽然示出安装于旋转电机2的轴3的示例,但如果是其它各种装置的旋转部(旋转体)的旋转轴,则安装对象不限于旋转电机。
12.图1中,冗余旋转变压器1安装于作为旋转电机2的旋转轴的轴3。冗余旋转变压器1包括作为传感器的旋转变压器主体4和对其进行控制的控制电路5。旋转变压器主体4包括一对定子41和转子42,绕组43卷绕在定子41上。转子42经由轴3与旋转电机2的旋转部相连接。控制电路5包括:向绕组43中后述的励磁绕组施加交流电压来励磁的励磁电路51;以及
根据绕组43中后述的输出绕组的信号波形来运算旋转角度的角度运算部52。图3中,如后述那样,励磁电路51和角度运算部52在主系统和副系统中包括励磁电路511、512和角度运算部521、522。
13.在图2中示出控制电路5的微机的硬件的一个示例。由处理器500及存储装置510构成,虽未图示,但存储装置510具备随机存取存储器等易失性存储装置、和闪存等非易失性的辅助存储装置。此外,也可以具备硬盘这样的辅助存储装置以代替闪存。处理器500通过执行从存储装置510输入的程序,从而进行例如角度运算部52中的角度运算。该情况下,将程序从辅助存储装置经由易失性存储装置输入到处理器500。另外,处理器500可以将运算结果等数据输出至存储装置510的易失性存储装置,也可以经由易失性存储装置将数据保存至辅助存储装置。另外,控制电路5内的硬件可以不是微机,也可以是asic(application specific integrated circuit:专用集成电路)、fpga(field programmable gate array:现场可编程门阵列)、简单逻辑电路或继电器等。
14.图3是示出本实施方式1所涉及的冗余旋转变压器1的结构的图。图中,冗余旋转变压器1包括主系统101的旋转变压器和副系统102的旋转变压器。主系统101的旋转变压器和副系统102的旋转变压器具有第一输出绕组sa、第二输出绕组sb和励磁绕组r,以作为绕组43的结构。第一输出绕组sa和第二输出绕组sb分别连接到角度运算部521、522,励磁绕组r分别连接到励磁电路511、512。主系统101的角度运算部521和副系统102的角度运算部522通过角度运算部通信器6相连接。主系统检测角度θm和副系统检测角度θs被输入到角度运算部通信器6,在主系统101和副系统102均正常的情况下,将主系统检测角度θm输出到例如控制装置13(参照图14)。
15.主系统检测角度θm和副系统检测角度θs被输入到角度运算部通信器6,在主系统101故障了的情况下,将副系统检测角度θs输出到控制装置13。此外,在副系统102故障了的情况下,将主系统检测角度θm输出到控制装置13。同样地,主系统101的励磁电路511和副系统102的励磁电路512通过励磁电路通信器7相连接。励磁电路通信器7中,使从主系统101的励磁电路511和副系统102的励磁电路512输出的主系统励磁信号和副系统励磁信号的相位一致,以避免主系统101与副系统102之间的磁干扰。由此,角度运算部521、522和励磁电路511、512设置于各系统,以确保冗余性。
16.图4是图1中x-x线的旋转变压器主体4的剖视图。图4中,绕组43卷绕在具有磁轭412和齿411的定子41的各齿411上。具有凸极部的转子42安装在轴3上。本实施方式1中,冗余旋转变压器1的定子的齿411的数量ns为12,并将转子42的凸极的数量nx设为5。凸极的数量nx也被称为轴倍角。
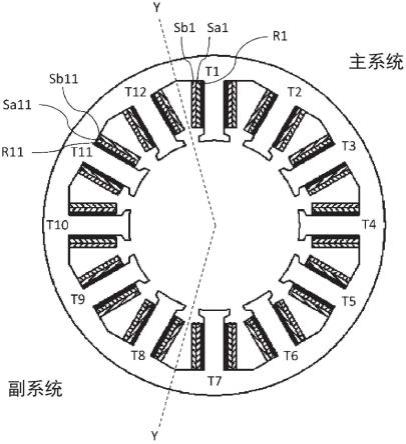
17.图5是从图4中去除了转子42和轴3后的图,相当于定子41的剖视图,是示出主系统101和副系统102的旋转变压器的一部分结构的图。如上所述,冗余旋转变压器1的定子41的齿411的数量ns为12。图5中,如果将各齿411在顺时针方向上设为齿t1~齿t12,则如图中y-y线所分割的那样,在周向上被分割成由齿t1~齿t7构成的主系统齿、和由齿t8~齿t12构成的副系统齿这两部分。即,主系统齿的数量为7个,副系统齿的数量为5个,构成为主系统齿的数量较多。该主系统齿构成主系统101的旋转变压器,副系统齿构成副系统102的旋转变压器,两者构成双系统的冗余旋转变压器1。
18.接着,对卷绕于各齿t1~t12的绕组43进行说明。由一相励磁绕组r、以及二相输出绕组即第一输出绕组sa、第二输出绕组sb构成的绕组组卷绕于各齿t1~t12。即,主系统101的励磁绕组r1~r7、主系统101的第一输出绕组sa1~sa7、主系统101的第二输出绕组sb1~sb7卷绕于主系统齿t1~t7。同样地,副系统102的励磁绕组r8~r12、副系统102的第一输出绕组sa8~sa12、副系统102的第二输出绕组sb8~sb12卷绕于副系统齿t8~t12(图5中,仅示出齿t1的第一输出绕组sa1、第二输出绕组sb1、励磁绕组r1、以及齿t11的第一输出绕组sa11、第二输出绕组sb11、励磁绕组r11)。
19.主系统101的励磁绕组r1~r7及副系统102的励磁绕组r8~r12分别经由设于旋转变压器的延伸部(未图示)的励磁端子(未图示)连接到主系统101的励磁电路511、副系统102的励磁电路512。
20.主系统101的第一输出绕组sa1~sa7、主系统101的第二输出绕组sb1~sb7分别经由设于旋转变压器的延伸部的输出端子(未图示)连接到主系统101的角度运算部521。副系统102的第一输出绕组sa8~sa12、副系统102的第二输出绕组sb8~sb12分别经由设于旋转变压器的延伸部的输出端子(未图示)连接到副系统102的角度运算部522。主系统101的角度运算部521和副系统102的角度运算部522分别利用从第一输出绕组sa和第二输出绕组sb的二相输出绕组输出的输出信号,来计算转子的主统检测角度θm和副系统检测角度θs并输出(参照图3)。
21.图5中,若着眼于齿t1,则首先卷绕有励磁绕组r1,接着依次卷绕有第一输出绕组sa1、第二输出绕组sb1。即,构成为先卷绕励磁绕组r1,然后在其上卷绕两相输出绕组。该两相的第一输出绕组sa1、第二输出绕组sb1的卷绕顺序不限于此,可以先卷绕任意一个。此外,有时设置一种齿,其不卷绕两相的第一输出绕组sa1、第二输出绕组sb1中任一相的输出绕组。包含齿t1的定子铁心和绕组r1、sa1、sb1通过绝缘纸、涂层、树脂等(未图示)来绝缘。另外,对齿t1进行了说明,但对于其它齿t2~t12,也以同样的方法卷绕有励磁绕组r2~r12、第一输出绕组sa2~sa12、第二输出绕组sb2~sb12。
22.励磁绕组r1~r7、第一输出绕组sa1~sa7、第二输出绕组sb1~sb7分别串联连接。同样地,励磁绕组r8~r12、第一输出绕组sa8~sa12、第二输出绕组sb8~sb12也分别串联连接。另外,这里,各个绕组按齿t1~t7以及齿t8~t12的顺序串联连接,但即使卷绕开始时的齿分别是各个系统内的任意齿ti、且从相邻的齿开始依次串联连接,也能得到同样的效果。
23.另外,将一相励磁绕组r和作为两相输出绕组的第一输出绕组sa、第二输出绕组sb在周向上排列卷绕,但并不限于此,即使在径向上排列、或者针对每个齿来变更卷绕的顺序等也能得到同样的效果。
24.接着,对本实施方式1所涉及的冗余旋转变压器的主系统101的励磁绕组r1~r7和副系统102的励磁绕组r8~r12的匝数进行说明。图6是示出本实施方式1所涉及的冗余旋转变压器中的绕组的分布的图。图中,按振幅使励磁匝数标准化,并连续示出卷绕于主系统齿t1~t7和副系统齿t8~t12的励磁绕组r的匝数。旋转变压器的励磁绕组中定义了卷绕方向(+)和卷绕方向(-)。本实施方式1中的冗余旋转变压器1中,励磁绕组r的卷绕方向(+)和卷绕方向(-)交替配置。卷绕方向(+)和卷绕方向(-)表示绕组的相互不同的卷绕极性,如果用
卷绕方向(+)来表示某个线圈的绕组的方向,则绕组反向卷绕的线圈表现为卷绕方向(-)。卷绕方向(+)的匝数与卷绕方向(-)的匝数的绝对值相同。由此,励磁绕组r的空间阶数ne为6。即,若将卷绕方向(+)的匝数设为+x匝,则卷绕方向(-)的匝数为-x匝。另外,这里,设为卷绕方向(+)、卷绕方向(-)交替卷绕,励磁绕组r的空间阶数为6,但并不限于此,也可以是卷绕方向(+)、卷绕方向(-)按每两个齿配置的励磁绕组的空间阶数为3的绕组配置等其它的绕组配置。
25.图7是示出本实施方式所涉及的冗余旋转变压器1的主系统101的第一输出绕组sa1~sa7、第二输出绕组sb1~sb7以及副系统102的第一输出绕组sa8~sa12、第二输出绕组sb8~sb12的匝数的分布的图。图中,按振幅使输出匝数标准化,并连续示出卷绕于主系统齿t1~t7和副系统齿t8~t12的输出绕组的匝数。卷绕于第i个齿的第一输出绕组、第二输出绕组的匝数n
sai
和n
sbi
的绕组的相位差为90
°
,能用以下的式(1)来表示。
26.[数学式1][数学式1]|α-β|=90
°ꢀ
式(1)
[0027]
这里,n1表示输出绕组的匝数的振幅,θ
teeth
表示齿的周向位置。励磁绕组r的空间阶数ne为6,轴倍角nx为5,因此,这里输出绕组的空间阶数为1。输出绕组在齿的周向上呈正弦波状地分布。匝数为小数时,四舍五入取整数。这里,同一图中,输出绕组的匝数以其振幅、即n1标准化。
[0028]
图8是对本实施方式1所涉及的冗余旋转变压器1与比较例、即主系统齿的数量为6的冗余旋转变压器的角度检测精度进行比较的图。纵轴用比较例的值对角度误差的电气角5阶分量进行标准化。通过将主系统齿的数量设为7,从而得到输出信号的齿的数量增加,因此,能得到可以使主系统101的角度检测精度提高的效果。
[0029]
本实施方式1所涉及的冗余旋转变压器1在主系统101的角度运算部521与副系统102的角度运算部522之间通信,将主系统检测角度θm输入到控制装置13,以控制旋转电机2。在角度运算部521或角度运算部通信器6检测到主系统101的故障的情况下,将副系统检测角度θs输入到控制装置13。在角度运算部522或角度运算部通信器6检测到副系统102的故障的情况下,将主系统检测角度θm输入到控制装置13。由此,本实施方式1所涉及的冗余旋转变压器中,虽然与单系统旋转变压器具有相同尺寸但能实现冗余化,并且,与将定子分成一半来冗余化的冗余旋转变压器相比,能提高正常时的角度检测精度。
[0030]
图9示出主系统齿的数量从3变化到11时的角度检测精度。这里,纵轴用比较例的值对角度误差的电气角5阶分量进行标准化。通过将主系统齿的数量设为7以上、即比所有齿的数量的半数要多,从而与主系统齿和副系统齿的数量为相同数量时相比,能提高角度检测精度。
[0031]
这里,将本实施方式1所涉及的冗余旋转变压器的轴倍角nx设为5,将齿的数量ns设为12,但不限于此,只要nx是自然数,ns是3以上的整数,则即使是其它数量也能得到同样的效果。
[0032]
实施方式2《励磁频率分离》图10是示出本实施方式2所涉及的冗余旋转变压器1a的结构的图。图中,冗余旋转变压器1a包括主系统101a的旋转变压器和副系统102a的旋转变压器。主系统101a的励磁电路511a和副系统102a的励磁电路512a不通过励磁电路通信器相连接,而是彼此独立。通过采用这种结构,能防止励磁电路通信器所引起的共同故障,因此,能得到可以使冗余旋转变压器的安全性进一步提高的效果。
[0033]
如上所述,本实施方式2所涉及的冗余旋转变压器中1a,向主系统101a的励磁绕组r1~r7提供励磁信号的励磁电路511a和向副系统102a的励磁绕组r8~r12提供励磁信号的励磁电路512a彼此独立,确保了冗余性。
[0034]
然而,由于彼此独立,难以使主系统101a的励磁信号和副系统102a的励磁信号同步。由于构成励磁电路511a和励磁电路512a的例如微机在制造上存在偏差,因此,即使将主系统101a的励磁信号和副系统102a的励磁信号的频率设计为同等,也无法完全一致,会产生微小的差异。由此,主系统101a的励磁信号和副系统102a的励磁信号的差异并非恒定,而是随着时刻变化,会对其它系统带来影响,成为角度检测精度恶化的原因。
[0035]
因此,从各个励磁电路511a、512a将不同频率的励磁信号提供给对应的励磁绕组r。图11示出本实施方式2所涉及的冗余旋转变压器1的主系统101a的励磁信号和副系统102a的励磁信号。主系统101a的励磁信号的频率f1为10khz,副系统102a的励磁信号的频率f2为20khz。此外,纵轴中,用振幅使励磁信号的电压标准化。
[0036]
此外,主系统101a的角度运算部521a和副系统102a的角度运算部522a具有分别将其它系统的频率分量去除的功能。即,从主系统101a的第一输出信号、主系统101a的第二输出信号中将副系统102a的励磁信号所产生的分量去除,仅取出主系统101a的励磁信号所产生的分量。此外,从副系统102a的第一输出信号、副系统102a的第二输出信号中将主系统101a的励磁信号所产生的分量去除,仅取出副系统102a的励磁信号所产生的分量。以下,对去除其它系统的频率分量的方法进行说明。
[0037]
图12是说明主系统101a的输出信号的波形的图,从上开始依次示出主系统101a的输出信号、主系统101a的励磁信号、副系统102a的励磁信号的波形。主系统101a的输出信号原本为与主系统101a的励磁信号相对应的频率f1的波形,但成为加上副系统102a的励磁信号的频率f2的分量后的波形。
[0038]
如图12所示,主系统101a的励磁信号的+a、-a分别相当于信号的正峰值、负峰值。然而,由于分别加上副系统102a的励磁信号分量+bn,因此可知在主系统101a的输出信号中,成为从正弦波失真后的波形。因此,如果以周期1/f1对该主系统101a的输出信号进行采样,并直接进行反正切运算,则产生因副系统的励磁信号频率f2的分量而引起的误差。
[0039]
因此,以2/f1对主系统101a的输出信号进行采样,并且设为{(a+bn)-(-a+bn)}/2。由此,能够仅提取主系统101a的励磁信号频率f1的分量a,并去除副系统102a的励磁信号频率f2的分量bn,能够提高旋转角度的检测精度。
[0040]
图13是说明副系统102a的输出信号的波形的图,从上开始依次示出副系统102a的输出信号、副系统102a的励磁信号、主系统101a的励磁信号的波形。副系统102a的输出信号原本为与副系统102a的励磁信号相对应的频率f2的波形,但成为加上主系统101a的励磁信号的频率f1的分量后的波形。如图所示,副系统102a的励磁信号的+b、-b、+b、-b分别相当于信号的正峰值、负峰值。然而,由于分别加上主系统101a的励磁信号分量+an1、+an2、-an1、-an2,因此可知在副系统102a的输出信号中,成为从正弦波失真后的波形。因此,如果以周期1/f2对该副系统102a的输出信号进行采样,并直接进行反正切运算,则产生因主系统101a的励磁信号频率f1的分量而引起的误差。
[0041]
因此,以2/f2对副系统102a的输出信号进行采样,并设为{(b+an1)+(b-an1)-(-b+an2)-(-b-an2)}/4。由此,能够仅提取副系统102a的励磁信号频率f2的分量b,并去除主系统101a的励磁信号频率f1的分量an,能够提高旋转角度的检测精度。
[0042]
本实施方式2中的冗余旋转变压器中,在一个圆形状的定子上配置有主系统101a和副系统102a。并且,针对每个系统提供不同频率的励磁信号,在各角度运算部521a、522a中去除其它系统的励磁信号的影响。由此,主系统101a和副系统102a处于独立的状态,也就是说,若着眼于主系统101a,则成为与如下情况相同的物理状态:励磁信号并未施加到卷绕于副系统102a的齿的副系统102a的励磁绕组r,副系统102a产生断线等故障。反之,若着眼于副系统102a,则成为与如下情况相同的物理状态:主系统101a产生断线等故障。这对如下优势带来了启发:通过从独立的励磁电路511a、512a提供彼此不同的频率的励磁信号,从而能够得到不对其它系统的信号带来影响的信号。通过采用该结构,从而能得到如下效果:由于不产生因励磁电路通信器而引起的共同故障,因此能提高安全性。此外,能避免主系统和副系统间的磁干扰,因此能提高角度检测精度。
[0043]
实施方式3《向电动助力转向装置的搭载》以上说明的冗余旋转变压器1能够应用于车辆用的电动助力转向装置。以下,参照图14来说明实施方式3所涉及的电动助力转向装置。
[0044]
图14是搭载于汽车等车辆的电动助力转向装置的示意结构图。在图14中,驾驶员操作的方向盘(未图示)连结到轴8的一端,驾驶员操纵方向盘,将其转矩传递到轴8。轴8连结到外壳9内的齿条轴(未图示)。在齿条轴的两端,分别连结有右前轮用连杆10a、左前轮用连杆10b,右轮(未图示)经由转向节臂(未图示)连结到右前轮用连杆10a,左轮(未图示)经由转向节臂(未图示)连结到左前轮用连杆10b。根据驾驶员的方向盘操作,使左右的前轮转向。另外,齿条护套14被设置成不让异物侵入装置内。
[0045]
电动助力转向装置辅助驾驶员进行的方向盘操作。该辅助是通过在驾驶员对方向盘进行转向并产生了转向转矩时,产生辅助该转向转矩的辅助转矩来进行的。如图1中所说明的那样,使作为永磁体型旋转电机的旋转电机2作为动力源来产生该辅助转矩。当驾驶员对方向盘进行转向时,由安装在轴8上的转矩传感器11来检测转矩。检测到的转矩被传递到主系统供电源20和副系统供电源21。另外,车速等车辆的信息也被转换成电信号,并被传输到主系统供电源20和副系统供电源21。主系统供电源20和副系统供电源21根据检测到的转矩和车速等车辆的信息来运算所需的辅助转矩,并通过旋转电机的控制装置13(逆变器等)
向旋转电机2提供电流。电力从电源22经由电源连接器提供到控制装置13。此外,如图1中所说明的那样,冗余旋转变压器1安装于旋转电机2的轴3。冗余旋转变压器1检测旋转电机2的转子的旋转角,并输出与之对应的旋转角度信号。另外,与控制电路5同样地,控制装置13也可以通过图2所示的硬件结构来构成。
[0046]
旋转电机2以与齿条轴的移动方向(箭头z)平行的方向配置。旋转电机2中产生的转矩传递到齿轮箱12内的皮带和滚珠丝杆,产生使位于外壳8内部的齿条轴向箭头z的方向移动的推力。利用该推力来辅助驾驶员的转向力。右前轮用连杆10a和左前轮用连杆10b通过旋转电机2的推力和驾驶员的转向力而动作,从而能使两轮转向并使车辆转弯。
[0047]
由此,利用旋转电机2的转矩来进行辅助,因此,驾驶员能以较少的转向力来使车辆转弯。在本实施方式所涉及的电动助力转向装置中,将上述实施方式1或2的冗余旋转变压器1应用于旋转电机2的旋转角度检测。在电动助力转向装置中,由于旋转电机2产生的齿槽转矩及转矩脉动经由齿轮传递给驾驶员,因此,为了获得良好的操舵感觉,希望齿槽转矩和转矩脉动较小。另外,期望旋转电机2动作时的振动和噪声也较小。
[0048]
因此,通过高精度地检测旋转电机2的旋转角度,从而能够顺畅地控制旋转电机,与旋转角度的检测精度低的情况相比,能够抑制转矩脉动的产生。另外,对于振动和噪声也相同。因此,将上述实施方式1或2的冗余旋转变压器1搭载于旋转电机2的电动助力转向装置能够向驾驶员提供良好的转向感。
[0049]
此外,实施方式1或2的冗余旋转变压器1在一个系统发生故障的情况下也能通过另一个系统来高精度地检测旋转角度,能持续输出辅助力。另外,图1中示出了将冗余旋转变压器1安装到旋转电机,但当然也可以将冗余旋转变压器1的主体安装到旋转电机内部,并将控制电路5设置在旋转电机2的外部。
[0050]
本公开记载了各种例示性的实施方式及实施例,但1个或多个实施方式中记载的各种特征、形态及功能并不限于特定实施方式的应用,可单独或以各种组合来应用于实施方式。因此,可以认为未例示的无数变形例也包含在本技术说明书所公开的技术范围内。例如,设为包括对至少一个构成要素进行变形、添加或省略的情况,以及提取至少一个构成要素并与其他实施方式的构成要素进行组合的情况。标号说明
[0051]
1 冗余旋转变压器2 旋转电机3 轴4 旋转变压器主体5 控制电路6 角度运算部通信器7 励磁电路通信器101、101a 主系统102、102a 副系统511、511a、512、512a 励磁电路521、521a、522、522a 角度运算部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1