位置感测机构的制作方法
1.本发明与感测技术有关,特别是关于一种位置感测机构,其利用穿隧式磁阻进行位置的感测。
背景技术:
2.通过感测编码元件中如磁或光等特定讯号在位置变动下所产生的变化,以进行位置解析的感测技术,为现有技术中被广泛采用的技术手段。具体而言,例如us6100681a号专利前案中,其利用了彼此相对位差为90度的两组霍尔感测晶片,来感测沿着一移动方向上的位置变动。又或者如us20090102461a号专利公开案中所揭,将编码元件所提供的,以磁为讯号源的技术中,将其所具有的两磁轨分别设为二进位制及十进位制,再以多数的离散式霍尔感测元件分别感测各个磁轨的磁场变化,据以解析以获知其位置资讯。上述以霍尔元件作为磁感测元件的技术手段,固然为位置感测技术中通常的技术,但由于霍尔元件本身具有较高的耗电量与较低的灵敏度,致使在作为位置感测元件上仍有其限制,特别是在需求低功耗与高感测灵敏度的应用上,霍尔感测元件已难以满足产业的需求。
3.在现有技术中更进一步的,则有如图1所示的us10480963号专利所揭,其虽也利用了霍尔感测器1来作为绝对列磁轨2的感测元件,但在增量列磁轨3的感测上,则是采用了自旋阀式穿隧磁阻元件4(spin-valve tunneling magneto-resistance,sv tmr)或异向性磁阻元件(anisotropic magneto-resistance,amr)等相对低功耗与高灵敏度的磁阻元件作为感测元件,期以获得较佳的感测灵敏度,但因自旋阀式穿隧磁阻元件4或异向性磁阻元件是通过感测磁轨移动时所造成的磁场角度变化,来获得位置解析的讯息,而为能准确地感测增量列磁轨中的磁场角度变化,即必需使自旋阀式穿隧磁阻元件或异向性磁阻元件的膜面位于x-z平面上,从而造成了与位于x-y平面上的绝对列磁轨感测元件即霍尔感测器1,是处于位在不同平面上的空间状态,进而衍生了必需通过组装,将绝对列与增量列的各个感测元件,在以零件身分独立被制成后,再个别地进行精准对位后组装至基板(图上未示)上,如此一来,不仅徒增了组装的工序与成本,对位的精准程度更影响到位置判别的精确性,难以有效地提高产品的良率。
技术实现要素:
4.本发明的目的是提供一种位置感测机构,其利用穿隧式磁阻进行位置的感测,且是将感测元件直接于基板上成型以获得具有复数感测元件的一体式感测器,据以免除感测元件以独立的离散零件身分被组装至基板上的组装工序,确保位置感测的精度不受不良组装工序所影响。
5.为实现上述目的,本发明采取以下技术方案:
6.本发明所提供的位置感测机构包含有一作为感测讯号源的编码元件,一用以进行感测该讯号源讯号的读取元件,以及一用以接收并解析该读取元件所输出感测信号的处理单元,而其技术上的主要特征则是在于使该读取元件中用以进行感测讯号源讯号的磁阻单
元,为穿隧磁阻(tunneling magneto-resistance,tmr),并使穿隧磁阻的参考层(reference layer)与自由层(free layer)两层的磁矩彼此垂直,同时彼此磁矩为垂直的参考层与自由层中,其中一层的磁矩是平行于膜面,而另一层的磁矩则垂直于膜面。
7.具体来说,本发明提供一种位置感测机构,包含有:
8.一编码元件,具有一绝对列磁轨与一增量列磁轨,彼此并列地沿着一虚拟的移动轴延伸;
9.一读取元件,相邻于该编码元件并与之相隔开来,且在该移动轴上与该编码元件间有相对位置的改变,该读取元件具有一受该绝对列磁轨所作用的第一磁阻单元,以及一受该增量列磁轨所作用的第二磁阻单元;
10.一处理单元,与该读取单元为电性的连接,用以接收该第一磁阻单元与该第二磁阻单元分别受该绝对列磁轨与该增量列磁轨作用下,各自产生的讯号,据以进行位置的解析;
11.该第一磁阻单元与该第二磁阻单元,分别为穿隧磁阻(tunneling magneto-resistance,tmr),并使参考层(reference layer)与自由层(free layer)的磁矩彼此垂直,同时使该参考层与该自由层中,其中一层的磁矩平行于膜面,而另一层的磁矩则垂直于膜面。
12.其中,该编码元件沿该移动轴相对该读取元件移动。
13.其中,该读取元件沿该移动轴相对该编码元件移动。
14.其中,该编码元件呈直条状。
15.其中,该编码元件呈圆环状。
16.其中,该读取元件更包含有一晶片,并使该第一磁阻单元与该第二磁阻单元分别成形于该晶片上。
17.其中,该第二磁阻单元为桥式穿隧磁阻(bridge tmr)。
18.其中,该第一磁阻单元具有单一的磁穿隧接面(single magnetic tunneling junction,single mtj)。
19.其中,磁矩垂直于膜面的可为该参考层或该自由层。
20.本发明的有益效果是:本发明位置感测机构,其利用穿隧式磁阻进行位置的感测,且是将感测元件直接于基板上成型以获得具有复数感测元件的一体式感测器,据以免除感测元件以独立的离散零件身分被组装至基板上的组装工序,确保位置感测的精度不受不良组装工序所影响。
附图说明
21.图1为现有技术的立体示意图。
22.图2为本发明一较佳实施例的立体示意图。
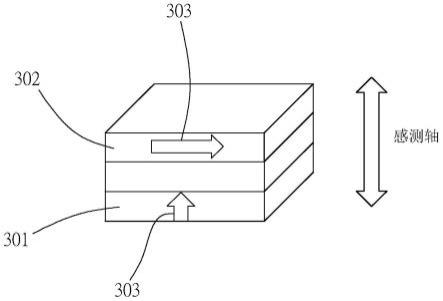
23.图3为本发明一较佳实施例中作为磁阻单元的穿隧磁阻平面示意图。
24.图4为本发明一较佳实施例的电阻与磁场的关系图。
25.图5为本发明一较佳实施例对于增量列的感测信号波形图。
26.图6为本发明一较佳实施例对于绝对列的感测信号波形图。
27.附图标号:1:霍尔感测器;2:绝对列磁轨;3:增量列磁轨;4:自旋阀式穿隧磁阻元
件;10:位置感测机构;20:编码元件;21:绝对列磁轨;22:增量列磁轨;30:读取元件;301:参考层;302:自由层;303:磁矩;31:第一磁阻单元;32:第二磁阻单元;33:基板。
具体实施方式
28.首先,请参阅图2所示,在本发明一较佳实施例中所提供的位置感测机构10主要包含有一编码元件20、一读取元件30以及一处理单元(图上未示)。
29.该编码元件20是以磁场作为讯号源的现有磁性尺技术,其在构造上包含了一绝对列磁轨21与一增量列磁轨22,并使该绝对列磁轨21与该增量列磁轨22彼此并列地沿着一虚拟的移动轴延伸,且在如图2所示的x-y平面依据预设的编码方式使磁极产生变动,一般来说,该移动轴通常是呈直线状,且与磁性尺的长度方向为一致的,但关于包含有该绝对列磁轨21与该增量列磁轨22的磁性尺技术,由于是属本发明所属技术领域的通常知识者在本发明申请前既已知悉的先前技术内容,故对其具体的磁极排列、制程或相关的技术,在此即不再另为赘陈。
30.该读取元件30则是包含了第一磁阻单元31与第二磁阻单元32,而各磁阻单元的数量则可依实际需求加以设定,其数量的多寡并无碍于本发明技术特征的达成,缘不就其数值加以说明,就该读取元件30的整体而言,其是与该编码元件20相隔开来地相邻于该编码元件20的一侧,并使该读取元件30往该编码元件20的投影范围可以涵盖到该绝对列磁轨21与该增量列磁轨22,俾得以在该读取元件30与该编码元件20彼此,无论是使该读取元件30相对于该编码元件20移动、或使该编码元件20相对于该读取元件30移动,当两者在该移动轴上产生相对位移时,均可使该该增量列磁轨22与该绝对列磁轨21的磁场变化,由该读取元件30所感测得知,具体上来说,该第一磁阻单元31是对应于该绝对列磁轨21,以感测在上述的相对位移状态下时,该绝对列磁轨21的磁场变动,而该第二磁阻单元32则是对应于该增量列磁轨22,以感测在上述的相对位移状态下时,该增量列磁轨22的磁场变动,从而通过该第一磁阻单元31与该第二磁阻单元32在感测该绝对列磁轨21与该增量列磁轨22的磁场讯号后,所输出的感测信号,该处理单元即可依据该些感测信号解析出该读取元件30与该编码元件20的相对位置,以取得移动位置的讯息,以供作为如线性马达或旋转马达等驱动元件的控制使用。
31.而需更进一步加以提出说明的是,该第一磁阻单元31与该第二磁阻单元32是有别于现有技术对于绝对列与增量列采用不同感测元件的技术,而是使该第一磁阻单元31与该第二磁阻单元32两者为相同技术的构造,而在本实施例中所揭者,是使该第一磁阻单元31与该第二磁阻单元32均为如图3所示的穿隧磁阻(tunneling magneto-resistance,tmr)构造,但其中,该第一磁阻单元31可为具有单一磁穿隧接面(single magnetic tunneling junction,single mtj)的穿隧磁阻,而该第二磁阻单元32则为桥式穿隧磁阻(bridge tmr),并使穿隧磁阻构成中的参考层(301,reference layer)与自由层(302,free layer)两层的磁矩303为相互垂直的状态,同时令该参考层301的磁矩垂直于膜面,以及令该自由层302的磁矩平行于膜面,从而使该参考层301与该自由层302的磁矩具有正交异向性,并使穿隧磁阻的感测膜面位于如图2所示的x-y平面上,据此,穿隧磁阻的电阻即可对垂直方向(如图3所示的感测轴即图2所示的z方向)上的外加磁场变化产生如图4所示的线性变化。
32.再者,该第二磁阻单元32的穿隧磁阻,其位于如图2所示x-y平面上的感测膜面,即
可受到该增量列磁轨22所产生的如图二所示z方向的弦波场,以产生如图5的感测信号,同时,该第一磁阻单元31的穿隧磁阻,其位于如图2所示x-y平面上的感测膜面,仅需判别该绝对列磁轨21在如图二所示z方向上磁场上的正负,因此,在上述的相对位移时下,该第一磁阻单元31的穿隧磁阻中的自由层302将会随着磁极变化而改变方向,而参考层301则保持着相同的方向,从而造成高低电阻差,以产生如图6所示的感测信号,以判别其磁极极性。
33.通过穿隧磁阻的参考层301与该自由层302间的磁矩正交异向性,即得以通过具有相同构造的穿隧磁阻来感测磁性尺中的绝对列磁轨与增量列磁轨的磁场变动,据以获悉正确的位置讯息。
34.更重要的是,该第一磁阻单元31与该第二磁阻单元32除具有相同的构造外,其与该编码元件20的相对位置也是以同一平面为基准,即图2所示的x-y平面,如此一来,构成该第一磁阻单元31与该第二磁阻单元32的穿隧磁阻,即可通过现有的半导体制程,以相同的薄膜沉积、黄光微影与蚀刻制程中,将预定数量与已定义相对位置的第一磁阻单元31与第二磁阻单元32一次成型于一基板(33,图2中以虚线示意者)上,从而免除如现有技术般需将离散的不同感测元件进行组装所衍生的缺失,以获得不需进行感测元件组装,以确保感测精度的位置感测机构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1