激光多普勒测速装置的制作方法
1.本发明属于测量技术领域,特别涉及一种激光多普勒测速装置。
背景技术:
2.多普勒效应表述信号源与观测者相对运动时,观测者接收到的信号源的空间频率变化的现象。这一现象最早由奥地利科学家多普勒发现的,所以称之为多普勒效应。近年来,随着基础元器件的发展以及基础科学理论的完善,多普勒效应在测速、测振方面的精度越来越高,尤其在激光多普勒技术领域更显著。当前的激光多普勒测量装置多是在设定的检测中心距离
±
20%的范围内进行检测,且检测的精度受到固定结构的限制,不能改变。针对不同的测速需求可能需要开发多个产品型号,且不能保证完全覆盖客户需求。
技术实现要素:
3.本发明实施例之一,一种激光多普勒测速装置,用于测量运动物体的运动速度。该装置包括激光器、分光镜、第一反射镜和第二反射镜,激光器发射的激光光束经由分光镜分为二束,该二束激光又分别经过第一反射镜和第二反射镜的反射同时照射到运动物体上的p点,
4.所述装置还包括透镜和探测器,透镜将运动物体上的p点光斑聚焦到探测器,通过获得拍频的频率测得运动物体的速度,
5.所述装置还包括激光位移传感器,用于测得所述装置与运动物体之间的间距,该间距的变化量用于调整第一反射镜和第二反射镜。
6.本发明提供了一种量程、精度可调的激光多普勒测量装置,采用双光路外差多普勒系统,光路的夹角及相交点位置可通过反射镜调整,通过改变两光路的光学结构,实现量程和精度的调节。
附图说明
7.通过参考附图阅读下文的详细描述,本发明示例性实施方式的上述以及其他目的、特征和优点将变得易于理解。在附图中,以示例性而非限制性的方式示出了本发明的若干实施方式,其中:
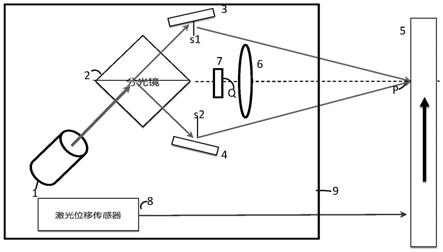
8.图1根据本发明实施例之一的激光多普勒测速装置结构示意图。
9.图2根据本发明实施例之一的激光多普勒测速装置结构示意图。
10.图3根据本发明实施例之一的激光多普勒测速方法流程图。
11.图4根据本发明实施例之一的激光多普勒测速方法流程图。
12.1——激光器,2——分光镜,3——第一反射镜,4——第二反射镜,5——待测运动物体,6——透镜,7——探测器,8——激光位移传感器,9——测速装置,10——电动位移平台。
具体实施方式
13.根据一个或者多个实施例,如图1所示,激光器1发出的平行激光光束经由分光镜2分为两束,分别传播到反射镜3和反射镜4上,经过反射后两束光同时照射在以速度v运动的物体5上的p点。由于p点相对于反射镜3、反射镜4是不是静止的,由此将导致光波的多普勒效应,在p点前方放置的透镜6将p点的光斑聚焦到探测器7上,通过对聚焦点q的光信号做傅里叶变换,可得到拍频的频率,如果已知两光束与运动物体的夹角、探测器与p点连线与运动物体的夹角,通过计算就可以得到物体5运动的速度v。
14.当物体5的运动速度超出当前的量程范围,可调节物体5与激光多普勒测速装置9的间距,利用内置的激光位移传感器8测得移动量,作为反射镜3和反射镜4的调整依据,待调整结束后进入测量模式,根据探测的拍频信号和已知的角度信息计算物体5运动的速度v。
15.当物体5的测量精度不符合要求时,调节物体5与激光多普勒测速装置9的间距,利用内置的激光位移传感器8测得移动量,作为反射镜3和反射镜4的调整依据,待调整结束后进入测量模式,根据探测的拍频信号和已知的角度信息计算物体5运动的速度v。
16.根据一个或者多个实施例,如图2所示,激光器1发出的平行激光光束经由分光镜2分为两束,分别传播到反射镜3和反射镜4上,经过反射后两束光同时照射在以速度v运动的物体5上的p点。由于p点相对于反射镜3、反射镜4是不是静止的,由此将导致光波的多普勒效应,在p点前方放置的透镜6将p点的光斑聚焦到探测器7上,通过对聚焦点q的光信号做傅里叶变换,可得到拍频的频率,如果已知两光束与运动物体的夹角、探测器与p点连线与运动物体的夹角,通过计算就可以得到物体5运动的速度v。
[0017][0018]
受硬件电路限制,探测器能够响应的合成波频率是有一定范围的。当物体5的运动速度过快,对应的合成波的频率也变大,可能超出当前的检测范围。此时需要调节两束光与物体法线的夹角i1和i2,减小合成波的频率,待可以被探测后再根据新的系数计算物体的运动速度v。
[0019]
具体的实现方式是,通过电动位移平台10改变运动物体5与激光多普勒测速装置9的间距,利用内置的激光位移传感器测得移动量,作为反射镜3和反射镜4的调整依据,待调整结束后进入测量模式,根据探测的合成波频率信号和新的角度信息计算物体5运动的速度v。
[0020]
当对运动物体5的测量精度不符合要求时,调节物体5与激光多普勒测速装置9的间距,利用内置的激光位移传感器测得移动量,作为反射镜3和反射镜4的调整依据,待调整结束后进入测量模式,根据探测的拍频信号和已知的角度信息计算物体5运动的速度v。
[0021]
受硬件电路限制,探测器的频率分辨率也是固定的。当物体5的运动速度变化,对应的合成波的频率也会等比例变化,如果速度引起的频率变化小于探测器的分辨率,将不能被探测到。此时需要调节两束光与物体法线的夹角i1和i2,增大合成波的频率,以此”放大”由速度变化引起的频率变化。
[0022]
具体的实现方式是,通过电动位移平台10改变物体5与激光多普勒测速装置9的间距,利用内置的激光位移传感器测得移动量,作为反射镜3和反射镜4的调整依据,待调整结
束后进入测量模式,根据探测的合成波频率信号和新的角度信息计算物体5运动的速度v。
[0023]
以下对本发明实施例的测速原理详细说明。
[0024]
空间中某点有一单色激光光源,光波的时间频率为f,经过准直透镜调整为平面波,入射到分光比为1:1的分光棱镜上,分别向前传播。一束光波入射到反射镜mirror1中某点s1,在t时刻的光振动u
s1
的表达式为:
[0025][0026]
式中,f是光波的时间频率;a
s1
是s1点的光振动的振幅,为s1点的初始相位。
[0027]
经由s1反射后传播距离l1,入射物体o上,p点在t时刻的光振动u
p1
的表达式为:
[0028][0029]
式中,k是光波在空气中的波数;a
p1
是p点的光振动的振幅,为s1点的初始相位。
[0030]
当待测物体以速度v运动,运动的切线方向与光线方向夹角为i1,则在运动方向上光波的频率将发生变化,由此产生多普勒频率漂移,此时光波频率f1为:
[0031][0032]
此时p点的光振动u
p1
'的表达式为:
[0033][0034]
若观测点q与p点距离为l1',两者连线与运动方向夹角γ,则在观测点的光波振动为:
[0035][0036]
同样的,对于经由s2点反射到p点的光波,光振动u
p2
'的表达式为:
[0037][0038]
此时观测点q与p点距离仍然为l1',两者连线与运动方向夹角仍为γ,则在观测点的光波振动为:
[0039][0040]
在q点的光束合振动为:
[0041][0042]
上式为双光束多普勒实验中的通用公式。
[0043]
在分光比为1:1且反射镜反射率相同的情况下,振幅a
q1
与a
q2
是相等的,可得光波在此点的合振动的复振幅为:
[0044][0045]
式中有两项,忽略两个初相位及引起初相位变化的距离,其中最低频率:
[0046][0047]
即为合成波的频率,其振幅随时间在2a
q1
与
‑
2a
q1
之间变化。(f1'+f2')/2也一直存在,但是由于频率在thz频段,无法被探测器探测到。
[0048]
合成波的光强度为:
[0049][0050]
探测器所能探测到的为拍频调制的第一项,振幅为2a
q12
,其时间频率为:
[0051][0052]
由此可见,合成波的频率与物体的运动速度v、运动的切线方向与光束的光线方向夹角i1和i2、及观测点q与p点连线与运动方向夹角γ有关。速度越大,δf越大;夹角i1和i2越大,δf越大。已知夹角i1、i2及γ的大小,结合探测到的合成波的频率δf,就可以求出物体的运动速度v。
[0053]
利用本发明,可以在附加较少成本的情况下,增加多普勒测速装置的检测范围和测量的精度。同样的思路也可以用于声波多普勒测速装置。
[0054]
值得说明的是,虽然前述内容已经参考若干具体实施方式描述了本发明创造的精神和原理,但是应该理解,本发明并不限于所公开的具体实施方式,对各方面的划分也不意味着这些方面中的特征不能组合,这种划分仅是为了表述的方便。本发明旨在涵盖所附权利要求的精神和范围内所包括的各种修改和等同布置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1