一种用于太阳自适应光学的大视场高阶复合波前传感器
1.本发明属于自适应光学领域,主要涉及太阳自适应光学系统中的波前探测技术,尤其是针对兼顾大传统高阶太阳自适应光学系统和大视场低阶地表层自适应光学系统复合型波前探测技术,特别涉及一种用于太阳自适应光学的大视场高阶复合波前传感器。
背景技术:
2.太阳自适应光学(ao)系统是国内外地基大口径太阳望远镜成功实现对太阳大气进行高分辨力成像观测的必要手段之一。地基太阳望远镜受到大气湍流的影响,空间分辨力通常不能超过20cm口径望远镜所能达到的分辨能力。为此,需要为其配备自适应光学系统,通过对大气湍流进行实时探测和补偿,充分发挥大口径太阳望远镜的成像能力,使之达到或接近衍射极限的观测性能。自适应光学系统分别是受到大气非等晕性限制,其校正视场十分有限,在可见光波段只有角秒量级,并不能满足太阳物理对角分量级太阳活动区的高分辨力成像观测需求。各种大视场自适应光学技术的提出,尤其是地表层自适应光学(glao),很好的解决了这一矛盾。
3.地表层自适应光学沿用分层探测和校正的概念,校正占据大气湍流主要成分的地表层湍流。glao校正虽然达不到衍射极限,却能在大视场范围内提升系统成像质量,对于太阳活动区的大视场监视,具有重要的意义。由于不同视线的光线在经过大气层时,在地表层经过相同的区域,而在高层则相互分离,因此可以先探测多个视线方向累计的波前误差,再基于平均算法,就能把地表层湍流提取出来。当前主流观点认为,glao技术将在太阳观测中发挥重要作用。若能将传统自适应光学和glao相结合,实现对太阳活动区进行大视场监视、小视场衍射极限成像。将有重要的应用价值。由于glao和传统ao都采用单块波前校正器,两者可以共用,不同的地方在于波前传感器。
4.对于太阳自适应光学系统而言,波前探测需要采用基于互相关算法的相关夏克
‑
哈特曼波前传感器。与夜天文自适应光学系统中对点源目标探测不同,相关夏克
‑
哈特曼波前传感器每个子孔径需要对应一定的探测视场,这样,有一定扩展度的图像进行相关运算,才能提取不同子孔径的波前像差,对于太阳大视场自适应光学技术而言,可以通过增加波前传感器的探测视场,来实现大视场多视线波前探测(d.soltau,t.berkefeld,el al astron.nachr./an323 3/4,236
–
240,2002)。然而,这种波前传感器面临子孔径数和探测视场的矛盾。为了保持相关算法的准确性,波前传感器需要维持一定的像素分辨率,在此前提下,特定探测视场的波前传感器,每个子孔径对应的相机靶面是一定的,子孔径数越多,探测视场越大,需要的探测相机靶面也就越大。但是受限于探测器技术本身,并且考虑到自适应光学系统对探测上千赫兹的时间帧频要求。两者之间必须做个取舍。通常而言,大视场波前传感器对应子孔径很少,不能进行高阶波前探测。并且,由于大视场夏克
‑
哈特曼波前传感器子孔径数与变形镜的校正驱动器个数不匹配,为了测量控制系统传递函数,还需额外辅助一个与变形镜驱动器数相匹配的波前传感器。针对当前coms相机的技术水平,这种大视场波前传感器仅能满足米级口径望远镜在角分量级视场的探测需求。对于更大口径望远
镜或者更大视场(5~10角分量级)glao系统波前探测,只能通过切分焦面,配备多个独立的波前传感器来实现多视线波前探测。如美国四米太阳望远镜dkist上大视场mcao系统,就是通过切分焦面实现9个视线方向的波前探测(d.schmidt,j.marino,et al,spie vol.10703 2018)。这种探测模式探测视场与系统成本和硬件复杂度同步增加。对于glao探测模式,探测的视场越多,平均算法得到的地表层湍流就越准确。dkist望远镜的波前传感器并不是个理想的选择。
5.本发明针对上述两种波前传感器存在的问题,提出一种复合型大视场高阶波前传感器。这种波前传感器通过大视场低阶/小视场高阶波前传感器组合的形式,使之更加符合glao系统对更大视场范围内更多实现方向的探测需求。
技术实现要素:
6.本发明要解决的技术问题为:本发明瞄准太阳物理研究对太阳大气进行大视场高分辨力监视、小视场衍射极限成像的需求,针对太阳自适应光学技术中,波前探测视场与探测精度(探测阶次)相矛盾的技术问题,提出一种用于太阳自适应光学的大视场高阶复合波前传感器。本发明基于像面分割器对望远镜大视场像面进行切割,再使用多个离散的夏克
‑
哈特曼波前传感器对不同视场的波前进行探测,从而实现超大视场波前探测。通过大视场低阶/小视场高阶夏克
‑
哈特曼波前传感器组合的形式,同时满足传统高阶自适应光学系统、大视场地表层自适应光学系统对波前探测器的不同需求。对于太阳活动区监测等既有大视场高分辨监测需求、又有小视场衍射极限成像需求的应用领域,有明确的应用价值。
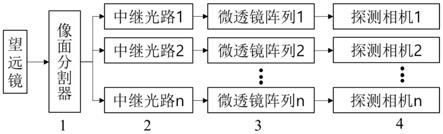
7.本发明解决上述的技术问题采用的技术方案为:一种用于太阳自适应光学的大视场高阶复合波前传感器,包括像面分割器、中继光路、微透镜阵列以及相应的探测相机;像面分割器将像面分割后导入不同的探测通道,每个探测通道包含中继光路、微透镜阵列以及探测器,对特定视场进行波前探测。在像面分割器将望远镜焦面分割后,分别引导进入不同的探测通道;其中,轴上探测通道对应十几角秒探测视场,离轴探测通道对应角分级的探测视场。在离轴探测通道上设置大视场波前传感器,通过选取子孔径图像的不同子区域,即可得到不同视线方向的探测信息,相同的探测通道情况下,可以获得更多的探测视场的累计波前像差;轴上通道仅考虑小视场探测,设置高阶波前传感器。通过大视场低阶/小视场高阶夏克
‑
哈特曼波前传感器组合的形式,同时满足传统高阶自适应光学系统、大视场地表层自适应光学系统对波前探测器的不同需求。
8.其中,像面分割器由平顶棱锥和反射镜组合而成。主要用于按需求切割视场,并引导特定视场的光线进入对应的波前传感器。离轴视场的光线需辅以反射镜进入到对应的波前探测通道;中心视场光线直接透射进入对应的波前传感器。
9.其中,中继光路可以是单个透镜或者透镜组,主要用于构造新的瞳面位置,并且使其口径和位置与后续微透镜阵列相匹配。
10.其中,微透镜阵列与探测视场的路数相对应,中心视场探测微透镜阵列对应成像视场小,阵列数多,可以实现小视场高阶波前探测;周围视场探测微透镜阵列对应成像视场大,阵列数少,可以实现大视场低阶波前探测。
11.其中,探测相机为大靶面高帧频科学级cmos相机或ccd相机,主要用来接收微透镜阵列聚焦后图像,用于后续相关运算和提取波前像差。
12.本发明与现有技术相比有如下优点:
13.(1)本发明瞄准大口径地基太阳望远镜超大视场地表层波前探测需求,以低对比度扩展目标为信标,开展大视场多视线波前探测。
14.(2)本发明兼顾大视场波前探测和高阶波前探测,可以同时满足传统高阶ao和大视场glao波前探测需求,并解决了传统方案中,大视场波前传感器需要辅助器件测量控制系统传递函数的问题。
15.(3)本发明在有限波前探测通道的情况下,可以获得更多视线方向的波前探测信息,更加有利于提取地表层湍流信息。
16.(4)基于一体化的视场切割模块,简化光路结构,减少误差源,缩减系统应用成本和复杂度。
17.总之,相比于传统大视场波前传感器,本发明突破了探测视场/探测阶次受限于探测相机技术本身的问题,探测视场更大,满足大口径太阳望远镜glao探测视场的需求。同时兼顾大视场波前探测和高阶波前探测,实现系统控制系统传递函数的测量和传统ao衍射极限的闭环能力;相比于当前切割焦面的波前传感器方案,本发明在切分相同探测视场个数的情况下,可以提供更多的探测视场波前信息;同时,采用平顶棱锥作为视场切分器,简化了波前传感器的设计,使之更经济也更加容易实现。
附图说明
18.图1为本发明中装置结构示意图;
19.图2为本发明中一个具体设计实例的结构布局示意图;
20.图3为本发明中一个具体设计实例的视场分割示意图;
21.图4为本发明中一个具体设计实例的轴上和离轴波前传感器子孔径布局图。
22.图中附图标记含义为:1为像面分割器,11为平顶棱锥,12为反射镜,2为中继光路,3为微透镜阵列,4为探测相机。
具体实施方式
23.下面结合附图以及具体实施例具体说明本发明。
24.如图1所示,本发明一种用于太阳自适应光学的大视场高阶复合波前传感器,包括像面分割器1、中继光路2、微透镜阵列3以及相应的探测相机4;像面分割器1将像面分割后导入不同的探测通道,每个探测通道包含中继光路2、微透镜阵列3以及探测相机4,对特定视场进行波前探测。在像面分割器将望远镜焦面分割后,分别引导进入不同的探测通道;其中,轴上探测通道对应十几角秒探测视场,离轴探测通道对应角分级的探测视场。在离轴探测通道上设置大视场波前传感器,通过选取子孔径图像的不同子区域,即可得到不同视线方向的探测信息。如此,相同的探测通道情况下,可以获得更多的探测视场的累计波前像差;轴上通道仅考虑小视场探测,设置高阶波前传感器。通过大视场低阶/小视场高阶夏克
‑
哈特曼波前传感器组合的形式,同时满足传统高阶自适应光学系统、大视场地表层自适应光学系统对波前探测器的不同需求。
25.其中,像面分割器1由平顶棱锥和反射镜组合而成。主要用于按需求切割视场,并引导特定视场的光线进入对应的波前传感器。离轴视场的光线需辅以反射镜进入到对应的
波前探测通道;中心视场光线直接透射进入对应的波前传感器。
26.其中,中继光路2可以是单个透镜或者透镜组,主要用于构造新的瞳面位置,并且使其口径和位置与后续微透镜阵列相匹配。
27.其中,微透镜阵列3与探测视场的路数相对应,中心视场探测微透镜阵列对应成像视场小,阵列数多,可以实现小视场高阶波前探测;周围视场探测微透镜阵列对应成像视场大,阵列数少,可以实现大视场低阶波前探测。
28.其中,探测相机4为大靶面高帧频科学级cmos相机或ccd相机,主要用来接收微透镜阵列聚焦后图像,用于后续相关运算和提取波前像差。
29.图2至图4为基于本发明的创新思想的一种具体的设计实例。该实例基于1.8米口径的太阳望远镜,其中图2为大视场高阶复合波前传感器的结构布局示意图,图3为像面分割器分割进入到各探测通道的视场,以及各波前传感器对应的探测视场分布示意图。图4为轴上视场和离轴视场的微透镜阵列布局。
30.图2中,望远镜过来的光先构造成像方远心光路,望远镜焦面位于平顶棱锥11处。平顶棱锥11和反射镜12共同构成焦面分割器,将不同视场的光线分割引导进入不同的探测通道,系统可以根据探测需求,改变平顶棱锥,平顶、斜面宽度,调整不同探测通道的视场。实例中采用一个平顶四棱锥,将望远镜焦面分割成5个区域(另外两个探测通道未画出),例如探测通道2对应中心视场,只通过20秒的视场,离轴视场分别引入到周围四个探测通道,对应大视场探测。每个探测通道内均包含中继光路2,微透镜阵列3,以及探测相机4。中继光路2构造合适的瞳面位置和口径,匹配后续微透镜阵列。同时保留一个焦面位置放置视场光阑。由图3可知,该实例中,望远镜视场为5角分(300角秒),视场分割后,轴上探测通道对应20角秒视场,用于高阶探测,离轴探测通道对应1角分视场,在每个探测通道内,又可以根据需要选取5个视线方向进行波前探测。即,5个成像通道可以实现21个视线方向的波前探测。
31.图4为轴上视场和离轴视场的微透镜阵列布局。针对1.8米口径的望远镜,为了保证足够高阶次的波前探测能力,小视场高阶夏克
‑
哈特曼波前传感器需要至少23
×
23的子孔径,对应空间采样尺度约8cm,可以保证对于中等大气视宁度进行有效高精度探测。波前传感器像元分辨率0.6角秒/像素计算,15秒探测视场,单个子孔径对应25像素,高阶波前传感器靶面需要达到825
×
825左右,当前scmos相机可以满足波前传感器上千赫兹的采样频率。而对于离轴探测通道而言,要保证波前传感器60秒探测视场,同样0.6角秒/像素采样率,单个子孔径对应100像素,11
×
11的子孔径布局,需要相机靶面已经达到1100
×
1100,已经是当前探测相机的技术极限。
32.本发明未详细阐述的部分属于本领域公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1