一种自适应网格点VRS改正数生成方法与流程
一种自适应网格点vrs改正数生成方法
技术领域
1.本发明涉及姿态估计技术领域,尤其涉及一种自适应网格点vrs改正数生成方法。
背景技术:
2.现有的格网化vrs技术存在以下问题:
3.首先,虽然格网化vrs技术有效破解了用户数量对网络rtk技术约束,从而使得gnss高精度定位服务进一步扩大应用领域成为可能。但是,也需要注意到格网化vrs技术本身的问题,即格网划分标准全部依赖于操作人员的经验判断或实测结果验证。考虑到大气环境在不同时间、空间环境下的多变性和复杂性,基于经验设定的格网划分标准实际上增加了定位效果的不可控性,降低了定位的可靠性。
4.其次,大气格网点与当前大气延迟直接相关,又由于大气延迟随时间不断变化,故大气格网点的密度和点位也在不断变化。结合上述理论,vrs站点变更会导致用户需要重新收敛固定模糊度,频繁的变更站点会严重降低用户的定位效果。
5.最后,现有vrs改正数生成方法中,电离层延迟改正数、对流层延迟改正数、轨道误差改正数以及几何距离改正数均使用同一组虚拟基准站坐标,这导致现有vrs技术在面对高动态用户时,受限于自身技术方案,需要频繁更换虚拟基准站位置,以保证与用户之间距离,因此高动态用户在使用网络rtk服务时也面临虚拟基准站不断迁站导致的频繁初始化。
技术实现要素:
6.为了解决以上现有技术的缺点和不足之处,本发明的目的是提供一种自适应网格点vrs改正数生成方法。
7.本发明的技术方案是:一种自适应网格点vrs改正数生成方法,所述方法包括以下步骤:
8.通过cors网各基线实时大气信息基于线性内插或反距离内插生成实时大气误差模型,并基于实时大气误差模型和大气误差阈值计算大气格网点坐标,再根据大气格网点坐标内插生成单差电离层延迟改正数和单差对流层延迟改正数;
9.根据事先设定的几何格网点坐标,依次生成各格网点的几何距离改正数;
10.根据单差电离层延迟改正数、单差对流层延迟改正数以及几何距离改正数生成各格网点的vrs改正数。
11.进一步地,所述大气格网点坐标的计算方法包括以下步骤:
12.s01、计算大气格网步长;
13.s02、划分大气格网。
14.进一步地,所述大气格网步长的计算方法如下:
15.s01-1、计算本区域电离层延迟和对流层延迟在经线和纬线上的拟合因子;
16.s01-2、通过拟合因子和大气误差阈值计算格网在经线和纬线上的划分步长。
17.进一步地,所述拟合因子的计算方法为:
[0018][0019]
coru=a1·
δxu+a2·
δyu;
[0020]
式中,err表示各基线的大气误差,δx表示基线在经线方向的映射长度,δy表示,coru表示基线在纬线方向的映射长度,a1表示本区域电离层延迟和对流层延迟在经线上的内插系数,a2表示本区域电离层延迟和对流层延迟在纬线上的内插系数。
[0021]
进一步地,所述格网在经线和纬线上的划分步长的计算方法为:
[0022]
求δx2+δy2最小值,解算δx、δy;
[0023]
式中δx表示格网在经线上的划分步长,δy表示格网在经线上的划分步长。
[0024]
进一步地,所述vrs改正数的生成方法如下:
[0025][0026][0027][0028][0029]
式中,下标vrs代表虚拟基准站,下标mas代表主基准站,其中主基准站选择离用户概略坐标最近的gnss基准站,下标1代表卫星l1载波信号,下标2代表卫星l2载波信号;λ为载波信号波长,为载波相位观测值,δn为单差模糊度,p为伪距观测值,为虚拟基准站和主基准站关于卫星i的单差星地距改正数;为虚拟基准站和主基准站关于卫星i的单差l1电离层延迟改正数;为虚拟基准站和主基准站关于卫星i的单差l2电离层延迟改正数;为虚拟基准站和主基准站关于卫星i的单差对流层延迟改正数;为主基准站关于卫星i的残余误差改正数;为虚拟基准站和主基准站关于卫星i的单差轨道误差改正数。
[0030]
进一步地,几何格网点的密度为每个基准站一个几何格网点。
[0031]
本发明的有益效果是:与现有技术相比,
[0032]
1)本发明在格网化vrs技术的基础上,提出了基于星-站大气延迟信息的自适应格网化vrs改正数的生成方法,该方法通过对cors网的实时大气延迟模型进行精度分析,依据大气环境的变化情况自主调节格网划分步长,使得用户在cors服务范围内的任意地点与改正数之间的大气延迟误差小于规定值,从而确保定位服务的精度可控和可靠性;
[0033]
2)本发明对几何格网和大气格网进行分离,大气格网随大气信息实时变更坐标位
置以保证用户的定位精度;
[0034]
3)传统模式移动距离过长会重新初始化,而本发明几何格网点位置固定,保证用户了测量的连贯性,可将几何格网设置较为稀疏,通过两套格网的组合,相较于传统vrs技术和第一代的格网化vrs改正数技术需要频繁初始化,本发明长距离移动无需初始化,可以实时保障用户定位精度,同时提高对高动态用户的服务质量。
附图说明
[0035]
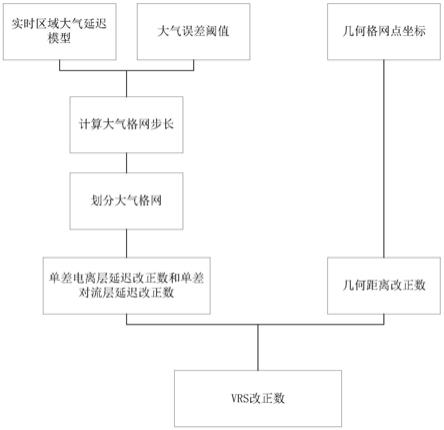
图1为本发明实施实例1的流程图。
具体实施方式
[0036]
下面结合附图及具体的实施例对发明进行进一步介绍:
[0037]
实施实例1:参考图1,一种自适应网格点vrs改正数生成方法,所述方法包括以下步骤:
[0038]
通过cors网各基线实时大气信息基于线性内插或反距离内插生成实时大气误差模型,并基于实时大气误差模型和大气误差阈值计算大气格网点坐标,再根据大气格网点坐标内插生成单差电离层延迟改正数和单差对流层延迟改正数;根据事先设定的几何格网点坐标,依次生成各格网点的几何距离改正数;根据单差电离层延迟改正数、单差对流层延迟改正数以及几何距离改正数生成各格网点的vrs改正数。
[0039]
用户在使用vrs改正数进行差分定位时,假设对流层延迟改正数、电离层延迟改正数、轨道误差改正数这些与距离相关的误差改正数被完全消除,则观测方差可以简化为:
[0040][0041][0042][0043][0044]
式中,下标vrs代表虚拟基准站,下标rover代表流动站,vrs-rover代表虚拟站到流动站,下标1代表卫星l1载波信号,下标2代表卫星l2载波信号,λ为载波信号波长,为载波相位观测值,为双差模糊度,双差载波相位观测值,为双差伪距观测值,上标i和j表示卫星编号。
[0045]
从上式可知,几何距离改正数和其他距离相关误差改正数之间是相互独立的。因此可以对几何距离改正数和其他误差改正数分开处理。又因为电离层延迟改正数、对流层延迟改正数、轨道误差改正数等由于其均为距离相关误差改正数,所以需要使用与用户较近的坐标生成改正数。但几何距离改正数由于其和观测值中的任何误差均不相关,其不影响用户最终的定位精度,因此几何距离改正数实际可以为任意值。传统vrs改正数中使用与大气延迟改正数相同的坐标计算几何改正数更多是希望提升vrs观测值的真实性,对定位结果并没有影响。但这一计算方法却制约了高动态用户的定位效果。在本发明中,对计算几何改正数和大气误差改正数使用的坐标进行区分,大气误差改正数使用大气格网点坐标,几何改正数所需坐标则可摆脱与用户间距离的限制。考虑到高动态用户频繁初始化这一问
题,需要大幅降低用户在运动过程中vrs改正数中几何信息的变更频率,故计算几何改正数的几何格网密度要尽可能降低。但考虑到vrs观测值是在主站观测值的基础上生成的,所以最低需要为每个基准站设置一个几何格网点。由于几何格网点位置不影响用户的定位结果,故具体设置数量和位置可自行决定。
[0046]
进一步地,所述大气格网点坐标的计算方法包括以下步骤:
[0047]
s01、计算大气格网步长;
[0048]
s02、划分大气格网。
[0049]
进一步地,所述大气格网步长的计算方法如下:
[0050]
s01-1、计算本区域电离层延迟和对流层延迟在经线和纬线上的拟合因子;
[0051]
s01-2、通过拟合因子和大气误差阈值计算格网在经线和纬线上的划分步长。
[0052]
进一步地,所述拟合因子的计算方法为:
[0053][0054]
coru=a1·
δxu+a2·
δyu;
[0055]
式中,err表示各基线的大气误差,δx表示基线在经线方向的映射长度,δy表示,coru表示基线在纬线方向的映射长度,a1表示本区域电离层延迟和对流层延迟在经线上的内插系数,a2表示本区域电离层延迟和对流层延迟在纬线上的内插系数。
[0056]
进一步地,所述格网在经线和纬线上的划分步长的计算方法为:
[0057]
求δx2+δy2最小值,解算δx、δy;
[0058]
式中δx表示格网在经线上的划分步长,δy表示格网在经线上的划分步长。
[0059]
进一步地,所述vrs改正数的生成方法如下:
[0060][0061][0062][0063][0064]
式中,下标vrs代表虚拟基准站,下标mas代表主基准站,其中主基准站选择离用户概略坐标最近的gnss基准站,下标1代表卫星l1载波信号,下标2代表卫星l2载波信号;λ为载波信号波长,为载波相位观测值,δn为单差模糊度,p为伪距观测值,为虚拟基准站和主基准站关于卫星i的单差星地距改正数;为虚拟基准站和主基准站关于卫星i的单差l1电离层延迟改正数;为虚拟基准站和主基准站关于卫星
i的单差l2电离层延迟改正数;为虚拟基准站和主基准站关于卫星i的单差对流层延迟改正数;为主基准站关于卫星i的残余误差改正数;为虚拟基准站和主基准站关于卫星i的单差轨道误差改正数。
[0065]
进一步地,几何格网点的密度为每个基准站一个几何格网点
[0066]
最后,各格网点以大气格网点坐标进行区分,在根据用户概略坐标选取格网点vrs改正数时,也根据用户坐标与大气格网点坐标最小原则选择对应格网点vrs,但需要注意的是,播发改正数时,播发的vrs观测值坐标应为几何格网点坐标。
[0067]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1