触觉传感器及其制造方法
1.本技术涉及电子器件,特别是涉及一种触觉传感器及其制造方法。
背景技术:
2.近年来,人工智能高速发展,现代社会向智能信息化社会发展,alphago(阿尔法狗)等智能程序在软件上实现了人工智能。而在硬件方面,受人脑工作模式启发的神经形态电子学高速发展,能够模仿人脑中突触学习行为的两端忆阻器与三端晶体管在硬件上实现了对信息的计算和存储一体化,提出了新一代的计算范式,推动了人造神经网络和神经形态工程的发展。许多传感器诸如电子皮肤等压力传感器实现了对刺激信号的检测,模仿了人体皮肤对刺激的接收功能,在医疗检测、运动健康检测、智能机器人技术中得到广泛的应用。
3.人体具有多功能感知系统,构成一个完整感觉活动需要人体的感受器、传入神经、神经中枢协同参与,例如触发触觉需要人体皮肤接收压力信号,压力信号被转化为电信号后,由传入神经传至神经中枢,经过神经中枢的处理,才会形成触觉感知。
4.随着神经形态电子器件的逐渐发展,对于人造仿生的触觉传感器的要求越来越高,如何改善感测的精准度和敏感性,增加触觉传感器的计算与存储功能,实现感测、计算、存储一体的多功能集成电子器件或系统成为本领域研究的重点。
技术实现要素:
5.有鉴于此,本技术实施例为解决背景技术中存在的至少一个问题而提供一种触觉传感器及其制造方法。
6.本技术实施例提供了一种触觉传感器,包括:薄膜晶体管,以及与所述薄膜晶体管导电连接的压力传感组件;其中,
7.所述压力传感组件包括第一弹性体、第二弹性体以及位于所述第一弹性体和所述第二弹性体之间的导电颗粒;所述压力传感组件通过所述第一弹性体和所述第二弹性体感测压力信号,并将感测到的所述压力信号转化为电信号;
8.所述薄膜晶体管包括源极、漏极和栅极,所述压力传感组件通过所述导电颗粒所在的界面将所述电信号传输至所述薄膜晶体管的栅极;所述薄膜晶体管的源极和漏极为所述触觉传感器的信号输出端。
9.在一个可选实施例中,与一所述薄膜晶体管导电连接的压力传感组件的数量为两个以上,两个以上所述压力传感组件彼此之间电绝缘。
10.在一个可选实施例中,还包括导线;
11.所述导线的一端与所述导电颗粒所在的所述界面连接,所述导线的另一端与所述栅极连接,以传输所述电信号。
12.在一个可选实施例中,所述第一弹性体具有第一凹凸表面,所述第二弹性体具有第二凹凸表面,所述第一凹凸表面朝向所述第二凹凸表面而设置;所述导电颗粒分布在所
述第一凹凸表面和所述第二凹凸表面上。
13.在一个可选实施例中,所述第一凹凸表面和/或所述第二凹凸表面通过从具有微结构的模具上进行转印而形成。
14.在一个可选实施例中,所述第一弹性体和/或所述第二弹性体的材料包括聚二甲基硅氧烷。
15.在一个可选实施例中,所述导电颗粒的材料包括氧化铟锡、金、银、或其组合。
16.在一个可选实施例中,所述薄膜晶体管还包括栅极介质层,所述栅极介质层的材料包括具有离子导电特性的固态电解质。
17.本技术实施例还提供了一种触觉传感器的制造方法,所述方法包括:
18.形成第一弹性体和第二弹性体,在所述第一弹性体和所述第二弹性体的表面形成导电颗粒;
19.将所述第一弹性体和所述第二弹性体以形成有所述导电颗粒的一面彼此相对封装在一起,形成压力传感组件;所述压力传感组件通过所述第一弹性体和所述第二弹性体感测压力信号,并将感测到的所述压力信号转化为电信号;
20.形成薄膜晶体管,所述薄膜晶体管包括源极、漏极和栅极;
21.将所述压力传感组件中所述导电颗粒所在的界面与所述薄膜晶体管的栅极导电连接;将所述薄膜晶体管的源极和漏极导电引出,以形成所述触觉传感器的信号输出端。
22.在一个可选实施例中,所述形成压力传感组件,包括:通过相同的步骤形成两个以上彼此独立的所述压力传感组件;
23.所述将所述压力传感组件中所述导电颗粒所在的界面与所述薄膜晶体管的栅极导电连接,包括:将两个以上所述压力传感组件分别与一所述薄膜晶体管的栅极导电连接。
24.上述触觉传感器及其制造方法,通过包括薄膜晶体管以及与所述薄膜晶体管导电连接的压力传感组件;所述压力传感组件包括第一弹性体、第二弹性体以及位于所述第一弹性体和所述第二弹性体之间的导电颗粒;所述压力传感组件通过所述第一弹性体和所述第二弹性体感测压力信号,并将感测到的所述压力信号转化为电信号;所述薄膜晶体管包括源极、漏极和栅极,所述压力传感组件通过所述导电颗粒所在的界面将所述电信号传输至所述薄膜晶体管的栅极;所述薄膜晶体管的源极和漏极为所述触觉传感器的信号输出端;如此,采用可精准感测压力信号的压力传感组件与薄膜晶体管电性连接,既保证了压力感测的敏感性,又可以通过薄膜晶体管的特性实现感测信号的计算与存储,从而为形成多功能一体化的触觉传感器提供了技术基础。
附图说明
25.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
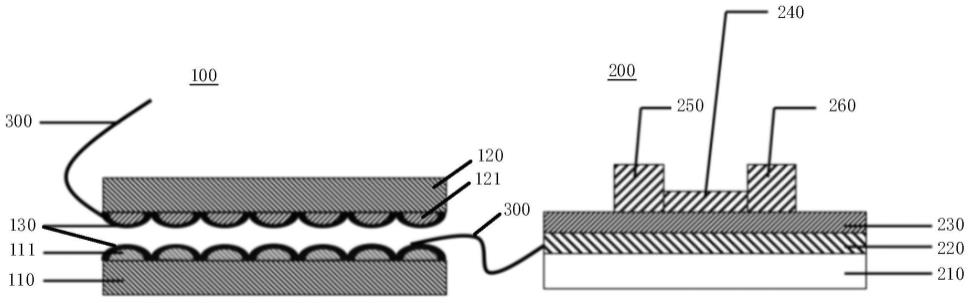
26.图1为本技术一实施例中触觉传感器的结构示意图;
27.图2为本技术另一实施例中触觉传感器的结构示意图;
28.图3为本技术实施例提供的触觉传感器的制造方法的流程示意图;
29.图4a至图4d分别为本技术具体示例中制备得到的触觉传感器在不同的测试条件下的沟道电流响应曲线;
30.图5是本技术具体示例中制备得到的触觉传感器对盲文的识别测试结果。
具体实施方式
31.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。基于本技术提供的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。此外,还可以理解的是,虽然这种开发过程中所作出的努力可能是复杂并且冗长的,然而对于与本技术公开的内容相关的本领域的普通技术人员而言,在本技术揭露的技术内容的基础上进行的一些设计,制造或者生产等变更只是常规的技术手段,不应当理解为本技术公开的内容不充分。
32.在本技术中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域普通技术人员显式地和隐式地理解的是,本技术所描述的实施例在不冲突的情况下,可以与其它实施例相结合。
33.除非另作定义,本技术所涉及的技术术语或者科学术语应当为本技术所属技术领域内具有一般技能的人士所理解的通常意义。本技术所涉及的“一”、“一个”、“一种”、“该”等类似词语并不表示数量限制,可表示单数或复数。本技术所涉及的术语“包括”、“包含”、“具有”以及它们任何变形,意图在于覆盖不排他的包含;例如包含了一系列步骤或模块(单元)的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可以还包括没有列出的步骤或单元,或可以还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。本技术所涉及的“连接”、“相连”、“耦接”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电气的连接,不管是直接的还是间接的。本技术所涉及的“多个”是指大于或者等于两个。“和/或”描述关联对象的关联关系,表示可以存在三种关系,例如,“a和/或b”可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。本技术所涉及的术语“第一”、“第二”、“第三”等仅仅是区别类似的对象,不代表针对对象的特定排序。
34.首先,请参考图1。本技术实施例提供了一种触觉传感器,包括:薄膜晶体管200,以及与所述薄膜晶体管200导电连接的压力传感组件100。其中,压力传感组件100可作为电子皮肤,用于感测外界压力信号,并将感测到的压力信号转化为电信号;电信号传至薄膜晶体管200的栅极,栅极受到刺激后,对沟道产生调控效应,从而通过检测薄膜晶体管200的源极和漏极之间流通的电信号实现触觉感知。
35.具体地,请继续参考图1,压力传感组件100包括第一弹性体110、第二弹性体120以及位于所述第一弹性体110和所述第二弹性体120之间的导电颗粒130;压力传感组件100通过第一弹性体110和第二弹性体120感测压力信号,并将感测到的压力信号转化为电信号。
36.这里,第一弹性体和/或第二弹性体可以为高分子弹性体,其材料例如包括聚二甲基硅氧烷(pdms)。在具体应用中,第一弹性体和/或第二弹性体可以采用预聚体和固化剂作为前驱物而生成;其中,预聚体与固化剂例如按照10比1~5比1的质量比配置成聚二甲基硅氧烷的溶液,经搅拌以及固化处理后,形成以聚二甲基硅氧烷为材料的第一弹性体和/或第二弹性体。
37.此外,第一弹性体和/或第二弹性体的材料还可以包括聚氨酯。
38.请继续参考图1,第一弹性体110具有第一凹凸表面,所述第二弹性体120具有第二凹凸表面,所述第一凹凸表面朝向所述第二凹凸表面而设置;所述导电颗粒130分布在所述第一凹凸表面和所述第二凹凸表面上。
39.其中,第一弹性体110例如包括第一微结构111,第一微结构111的对外表面形成所述第一凹凸表面;类似地,第二弹性体120例如包括第二微结构121,第二微结构121的对外表面形成所述第二凹凸表面。第一凹凸表面和第二凹凸表面上均分布有导电颗粒130。
40.在一个可选实施例中,第一凹凸表面和/或第二凹凸表面通过从具有微结构的模具上进行转印而形成。在具体制备中,首先提供具有微结构的模具,然后将配置的弹性体材料溶液倾倒在模具的具有所述微结构的表面上并进行固化,这里,弹性体材料溶液例如为前述配置的聚二甲基硅氧烷的溶液;将固化后的弹性体材料与磨具剥离,从而得到具有微结构的弹性体。该弹性体可以作为第一弹性体和/或第二弹性体。
41.其中,具有微结构的模具例如为表面具有金字塔结构的制绒硅片。该具有金字塔结构的制绒硅片具体可以通过在70℃~80℃下用氢氧化钾或氢氧化钠溶液对厚度为300μm~700μm、(100)取向的单晶si(c-si)晶片进行约5~15分钟的制绒处理而得。应当理解,本技术并不限于此,具有微结构的模具还可以为任意具有微结构的衬底,例如还可以为荷叶、砂纸等。
42.在一个可选实施例中,所述导电颗粒的材料包括氧化铟锡、金、银、或其组合;具体例如包括氧化铟锡和银。所述导电颗粒可以在第一凹凸表面和第二凹凸表面上分别形成为第一导电颗粒层和第二导电颗粒层,第一导电颗粒层和第二导电颗粒层的厚度范围例如为50nm~150nm。在具体制备中,所述导电颗粒可以通过磁控溅射和/或电子束蒸镀而沉积在第一凹凸表面和第二凹凸表面上。
43.压力传感组件还可以包括胶带,所述胶带用于将第一弹性体和第二弹性体以导电颗粒夹持在中间的方式固定在一起。第一凹凸表面和第二凹凸表面例如以凸面对凸面、凹面对凹面的方式面对面设置。
44.压力传感组件上产生的电信号的引出可以通过导线实现,具体可以通过在使用胶带固定之前,将导线的一端布置在导电颗粒上;从而在使用胶带固定时,导线被夹持在第一弹性体和第二弹性体之间。为了提高连接的稳固性,导线与导电颗粒之间还可以通过粘结剂固定。
45.请继续参考图1,所述薄膜晶体管200包括源极250、漏极260和栅极220,所述压力传感组件100通过所述导电颗粒所在的界面将所述电信号传输至所述薄膜晶体管的栅极220;所述薄膜晶体管的源极250和漏极260为所述触觉传感器的信号输出端。
46.这里,所述薄膜晶体管例如为氧化物薄膜晶体管。
47.所述薄膜晶体管200还可以包括衬底210,衬底210例如为绝缘衬底,其材料具体可以为塑料。
48.栅极220位于衬底210上。在其他一些实施例中,也可以直接采用导电衬底,导电衬底的导电层作为薄膜晶体管的栅极。栅极的材料可以包括氧化铟锡。
49.所述薄膜晶体管200还包括栅极介质层230,所述栅极介质层230的材料包括具有离子导电特性的固态电解质。这里,所述栅极介质层的材料具体可以包括以下至少之一:壳
聚糖、蛋清、甲基纤维素或淀粉。进一步地,可以选择蛋清和/或淀粉形成所述栅极介质层,蛋清和淀粉获取容易、成本较低且具有可降解的优点。
50.可以理解地,利用具有离子导电特性的固态电解质中质子的弛豫效应,可以有效地实现触觉传感器对压力信号的记忆功能。
51.所述薄膜晶体管的源极和漏极可以位于所述栅极介质层上,通过所述栅极介质层与所述栅极隔离。源极和漏极的材料例如包括以下至少之一:氧化铟锡、氧化铟钨、氧化铟锌。
52.请继续参考图1,所述薄膜晶体管200还包括沟道层240。沟道层240位于所述栅极介质层230上,且位于源极250和漏极260的中间。沟道层240为半导体沟道,其材料例如包括以下至少之一:氧化铟锡、氧化铟钨、氧化铟锌。沟道层240通过溅射技术沉积在栅极介质层230表面。沟道层240的厚度范围为7nm~70nm。
53.导线300,一端与导电颗粒130所在的所述界面连接,另一端与栅极220连接,以从压力传感组件100向薄膜晶体管200传输电信号。在实际应用中,导线300例如为铜线。
54.图2为本技术另一实施例中触觉传感器的结构示意图。如图所示,在本实施例中,与一所述薄膜晶体管200导电连接的压力传感组件100的数量为两个以上(图2中以两个为例示出),两个以上所述压力传感组件100彼此之间电绝缘。如此,可以在多个不同的位置放置压力传感组件,进行多端压力调控。
55.由于本技术实施例中采用压力传感组件与薄膜晶体管电性连接,二者之间的连接点在薄膜晶体管上占据的面积非常小,因此可以布置数量众多的压力传感组件,共同与薄膜晶体管相连。例如,与一薄膜晶体管导电连接的压力传感组件的数量为五十个以上。在实际应用中,薄膜晶体管的栅极可以连接多达1000数量级的压力传感组件,从而满足触觉感测的多端调控需求。
56.在具体应用中,可以在薄膜晶体管的源极和漏极之间施加恒定的源-漏电压,源-漏电压的范围例如为0.5v~2v。
57.可以理解地,由于较好的压力感测敏感性和对感测信号的计算与存储能力,本技术实施例提供的触觉传感器可以作为人造触觉感知神经元,从而应用于人机交互与电子器件领域。在人机交互技术中,模式化的压力信号同样可以作为信息的载体来传递。尤其是在盲文识别的应用中,由于盲文是一种特殊的代码,盲人通过触摸凸起的点字,感知来自手指的压力刺激,来识别盲文的具体含义,因而对压力感测的要求更高。在一般的传感器件中,识别盲文代码需要多个器件同时检测,电路复杂。而应用本技术实施例提供的触觉传感器,工艺简单、成本较低、电路简单,对智能机器人技术与人机交互技术具有重要意义。
58.本技术实施例还提供了一种触觉传感器的制造方法。图3为本技术实施例提供的触觉传感器的制造方法的流程示意图,如图所示,所述方法包括:
59.s01、形成第一弹性体和第二弹性体,在所述第一弹性体和所述第二弹性体的表面形成导电颗粒;
60.s02、将所述第一弹性体和所述第二弹性体以形成有所述导电颗粒的一面彼此相对封装在一起,形成压力传感组件;所述压力传感组件通过所述第一弹性体和所述第二弹性体感测压力信号,并将感测到的所述压力信号转化为电信号;
61.s03、形成薄膜晶体管,所述薄膜晶体管包括源极、漏极和栅极;
62.s04、将所述压力传感组件中所述导电颗粒所在的界面与所述薄膜晶体管的栅极导电连接;将所述薄膜晶体管的源极和漏极导电引出,以形成所述触觉传感器的信号输出端。
63.这里,第一弹性体和/或第二弹性体可以为高分子弹性体,其材料例如包括聚二甲基硅氧烷(pdms)。在具体制备中,第一弹性体和/或第二弹性体可以采用预聚体和固化剂作为前驱物而生成;其中,预聚体与固化剂例如按照10比1~5比1的质量比配置成聚二甲基硅氧烷的溶液,经搅拌以及固化处理后,形成以聚二甲基硅氧烷为材料的第一弹性体和/或第二弹性体。
64.此外,第一弹性体和/或第二弹性体的材料还可以包括聚氨酯。
65.在一具体实施例中,形成第一弹性体和/或形成第二弹性体的步骤包括:提供具有微结构的模具;配置弹性体材料溶液;将配置的弹性体材料溶液倾倒在模具的具有所述微结构的表面上并进行固化;将固化后的弹性体材料与磨具剥离,从而得到第一弹性体和/或第二弹性体。这里,固化具体可以采用加热固化,加热固化的条件例如为70℃~100℃的环境下加热固化1.5~2小时。
66.其中,具有微结构的模具例如为表面具有金字塔结构的制绒硅片。该具有金字塔结构的制绒硅片的形成步骤具体可以包括:在70℃~80℃下,用氢氧化钾或氢氧化钠溶液对厚度为300μm~700μm、取向为(100)的单晶si(c-si)晶片进行时间为5~15分钟的制绒处理,从而得到具有金字塔结构的制绒硅片。应当理解,本技术并不限于此,具有微结构的模具还可以为任意具有微结构的衬底,例如还可以为荷叶、砂纸等。
67.接下来,在第一弹性体和第二弹性体的表面形成导电颗粒;具体可以包括:通过磁控溅射和/或电子束蒸镀在第一弹性体和第二弹性体的表面形成导电颗粒。所述导电颗粒的材料包括氧化铟锡、金、银、或其组合;具体例如包括氧化铟锡和银。所述导电颗粒可以在第一弹性体和第二弹性体的表面上分别形成为第一导电颗粒层和第二导电颗粒层,第一导电颗粒层和第二导电颗粒层的厚度范围例如为50nm~150nm。
68.在步骤s02中,将所述第一弹性体和所述第二弹性体以形成有所述导电颗粒的一面彼此相对封装在一起,形成压力传感组件,具体可以包括:在第一弹性体或第二弹性体的形成有导电颗粒的表面上布置导线;将第一弹性体和第二弹性体以导电颗粒以及所述导线夹持在中间的方式面对面设置,采用胶带将二者固定封装在一起。
69.薄膜晶体管的制备过程可以采用如下步骤:
70.提供衬底,所述衬底例如为绝缘衬底,其材料具体可以为塑料;
71.在衬底上形成栅极;或者,在其他一些实施例中,直接提供导电衬底,导电衬底的导电层作为薄膜晶体管的栅极;栅极的材料可以包括氧化铟锡;
72.在栅极上形成栅极介质层;这里,所述栅极介质层的材料包括具有离子导电特性的固态电解质,具体可以包括以下至少之一:壳聚糖、蛋清、甲基纤维素或淀粉;在实际应用中,例如选择蛋清和/或淀粉形成所述栅极介质层;栅极介质层的形成工艺例如采用旋涂法;
73.接下来,在栅极介质层上形成沟道层、源极和漏极;具体可以通过溅射技术将沟道层、源极和漏极沉积在栅极介质层的表面上;其中,沟道层为半导体沟道,其材料例如包括以下至少之一:氧化铟锡、氧化铟钨、氧化铟锌;沟道层的厚度范围为7nm~70nm;源极和漏
极的材料也可以包括以下至少之一:氧化铟锡、氧化铟钨、氧化铟锌。
74.接下来,执行步骤s04,将压力传感组件中所述导电颗粒所在的界面与所述薄膜晶体管的栅极导电连接;具体地,可以通过导线将压力传感组件中导电颗粒所在的界面连接到薄膜晶体管的栅极上。
75.将薄膜晶体管的源极和漏极导电引出,以形成所述触觉传感器的信号输出端。
76.在一个可选实施例中,所述形成压力传感组件,包括:通过相同的步骤形成两个以上彼此独立的所述压力传感组件;
77.所述将所述压力传感组件中所述导电颗粒所在的界面与所述薄膜晶体管的栅极导电连接,包括:将两个以上所述压力传感组件分别与一所述薄膜晶体管的栅极导电连接。
78.下面,结合一具体示例对本技术实施例提供的触觉传感器及其制造方法作进一步解释说明。
79.所述触觉传感器的制造方法包括如下步骤:
80.步骤1:采用预聚体与固化剂按照10比1的质量比配置聚二甲基硅氧烷的溶液,搅拌20分钟后,对溶液进行15分钟的抽气处理使溶液中的气泡消失。
81.步骤2:将步骤1中抽真空处理后的溶液倾倒在准备好的制绒硅片表面,随后放入70℃的烘箱中进行加热固化处理,2小时后,将固化好的聚二甲基硅氧烷从制绒硅片上撕下,从而使聚二甲基硅氧烷的表面复刻了表面微结构。
82.步骤3:采用磁控溅射技术与电子束蒸镀技术对步骤2中得到的聚二甲基硅氧烷(即弹性体)制绒表面沉积氧化铟锡与银,膜厚约为100纳米。
83.步骤4:用胶带将铜线贴在具有导电颗粒的聚二甲基硅氧烷的一端,将两面处理好的聚二甲基硅氧烷面对面放置,具体是将含有导电颗粒的一面进行面对面放置,最后进行封装,得到压力传感组件。
84.步骤5:对含有氧化铟锡栅极的塑料衬底进行酒精与去离子水的循环超声清洗。
85.步骤6:将步骤5中清洗过后的塑料衬底用氮气枪吹干,并将含有氧化铟锡栅极的一面朝上放置。
86.步骤7:在栅极表面上采用旋涂法制备壳聚糖薄膜,作为栅极介质层。
87.步骤8:采用磁控溅射技术,用一步掩膜工艺在壳聚糖薄膜上沉积图案化的氧化铟锡沟道层和源漏电极,从而得到薄膜晶体管。
88.步骤9:用铜线将步骤4中得到的压力传感组件与步骤8中得到的薄膜晶体管的栅极相连,从而得到触觉传感器。该触觉传感器可以作为人造触觉感知神经元,通过将压力传感组件作为电子皮肤,感测外界压力信号,从而触发触觉感知活动。
89.图4a至图4d分别为本技术具体示例中制备得到的触觉传感器在不同的测试条件下的沟道电流响应曲线。
90.具体地,首先在压力传感组件的施加偏压端(请参考图1或图2中与压力传感组件100连接但不与薄膜晶体管200连接的导线300,即图中左侧的导线300)施加1v的恒定偏压,在薄膜晶体管的漏极施加恒定电压0.5v作为读取沟道电流的电压。然后,在制作的压力传感组件上施加持续0.2秒的3.14千帕的压力刺激,获得图4a所示的沟道电流响应曲线,即沟道电流(或称“兴奋性突触后电流”,用“epsc”表示,单位μa)随时间(time,单位s)的变化曲线。可以发现,图4a所示的沟道电流响应曲线与仅在压力传感组件(没有与薄膜晶体管导电
连接)上施加同样的测试条件时的响应曲线不同,本技术具体示例中制备得到的触觉传感器显示的曲线并未随着压力的消失而直接减小至初始电流,而是有一个缓慢回到沟道初始电流的弛豫现象,这表明所制造的人造触觉感知神经元对压力刺激有记忆作用,成功模仿了人类的触觉功能。
91.同样地,对触觉传感器分别施加不同压力大小、不同压力持续时间、不同压力个数,来检测沟道电流在不同压力条件下的变化情况。图4b示出了在不同压力大小(1.57kpa、3.14kpa、6.27kpa、7.84kpa、15.68kpa)的刺激下,沟道电流随压力的增加而增大;图4c示出了在压力大小相同、压力持续时间不同(1.67s、2.31s、3.13s、3.78s、3.98s)的条件下,沟道电流随压力的持续时间增加而增大;图4d示出了在压力大小与持续时间相同、压力刺激个数(1#、2#、3#、4#、5#)不同的条件下,沟道电流随压力个数的增加而增大。以上测试结果表明,所制造的触觉传感器具备对外界压力的感知行为,根据沟道电流的响应,能够区分不同的压力模式,并且对压力具有一定的记忆效果,所制造的触觉传感器成功模仿了人类的触觉功能。
92.图5是本技术具体示例中制备得到的触觉传感器对盲文的识别测试结果。这里,通过具体示例中的制备方法,制备得到具有两个压力传感组件分别与一薄膜晶体管的栅极导电连接的触觉传感器。
93.首先,在两个压力传感组件未与薄膜晶体管的栅极相连的一端分别施加1v与2v的恒定电压,在薄膜晶体管的漏极上施加恒定电压0.5v作为读取沟道电流的电压,将持续0.2秒的3.14千帕刺激作为盲文中的凸起的点。在识别盲文时,每个盲文字包含6个点信号,当手指感受到刺激代表手指皮肤接收到凸点信号,将其标记为“1”,反之,标记为“0”。盲文分为3行,每行包含两个信号,所以每行可识别的标记(recognized labels)有4类:“00”,“10”,“01”,“11”;两个压力传感组件作为识别盲文的两根手指,所以每行盲文的识别响应信号有四种。图5示出了识别每行盲文时,薄膜晶体管会产生的响应信号情况;当受到“10”刺激时,薄膜晶体管的相对响应在1~2微安;受到“01”刺激时,薄膜晶体管的相对响应在2~3.5微安;受到“11”刺激时,薄膜晶体管的相对响应在3.5~5微安;无刺激时,薄膜晶体管沟道电流无相对变化。在实际应用场景中,以对“hello”盲文的识别为例进行说明,通过测试获得“hello”中的每个字母的每行对应的相对沟道电流响应,“h”、“e”、“l”和“o”每个字母对应的响应电流的标记各不相同。从而,依据沟道电流的相对响应,可识别任意一个盲文字母,因此,本发明所制造的人工触觉感知神经元具备识别盲文的功能。
94.由于考虑到以下因素:如果仅使用一般的压力传感器检测压力信号,那么只能够实现对压力的检测作用,不具备对压力的记忆、计算等扩展功能,难以应用到神经形态电子器件中;而本领域目前使用的神经形态突触器件只能模仿突触的学习记忆功能,无法同时实现感测、计算、存储;因此,针对神经形态电子器件与压力传感器无法同时进行感测、计算、存储的技术现状,发明了一种感存算一体化的多功能触觉传感器,利用压力传感组件的压电转化效应与薄膜晶体管的可扩展功能的潜力,如栅极介质层中的离子调控效应,实现对压力的感知功能;并且,采用压力传感组件与薄膜晶体管电性连接的方式,可以提供将多个压力传感组件与一个薄膜晶体管相连的触觉传感器,从而实现对压力的多端调控,实现对压力的模式识别。
95.在栅极介质层的材料包括具有离子导电特性的固态电解质的实施例中,利用压力
传感组件的压电转化特性与离子导体电解质的质子调控特性,实现压力驱动器件,模仿人类的触觉感知;利用电解质中质子的弛豫效应,实现器件对压力的记忆功能,通过将多个压力传感组件与薄膜晶体管连接,在不同压力模式下区分薄膜晶体管沟道电流的响应,实现对盲文的识别功能。
96.与相关技术中的神经形态器件相比,本技术实施例采用压力传感组件与薄膜晶体管(例如相关技术中的突触器件)相结合,实现了对压力刺激的感知记忆与模式识别,模仿了人类触觉感知活动,进一步优化了单一传感器只能检测压力的功能,并且实现了对盲文的识别,同时,器件的制作工艺简单,制作成本低廉。这种人造触觉感知神经元在智能机器人和人机交互技术领域具有良好的应用前景和重要的应用潜力。
97.以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
98.以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1