稳健轮胎/车轮振动监测器系统的制作方法
1.本公开涉及用于稳健轮胎/车轮振动监测器系统的系统和方法。
背景技术:
2.振动在机动车辆中常见。振动可由内部激励引起,例如由内部运动部件(包括发动机和车轮)的不规则性引起的内部激励。车轮振动呈周期性,因为它们的模式会在相应车轮的每次旋转中重现。由于轮胎和轮辋的制造偏差以及轮胎的正常磨损而存在周期性振动。例如,在轮胎制造期间,轮胎周向部分周围的轮胎厚度的变化可产生更厚和更薄区域。不规则的厚度会导致被称为跳动(runout)的状况,其可通过轮胎周向部分周围的外径变化来观察到。当轮胎和轮辋的质量围绕轮胎周向部分不均匀地分布时,制造变化还可以表现为局部重量变化。
3.期望的是用于监测轮胎/车轮振动的车载技术。
技术实现要素:
4.本文提供振动监测系统。振动监测系统包括多个编码器和分析器。多个编码器被配置为产生用于多个车轮的多个脉冲串信号。多个编码器中的每个编码器联接到多个车轮中的相应一个车轮且产生多个脉冲串信号中的单个脉冲串信号。分析器联接到多个编码器且被配置为响应于多个脉冲串信号而针对多个车轮产生多个每转脉冲信号和多个角速度信号。多个每转脉冲信号中的每个信号在相应车轮的每次旋转传送单个脉冲。分析器还被配置为产生表示由多个车轮引起的多个每转脉冲信号的输入相量阵列,产生表示由多个车轮引起的多个角速度信号的响应相量阵列,并响应于输入相量阵列和响应相量阵列产生识别多个车轮中的至少一个振动车轮的报告。
5.在振动监测系统的一个或多个实施例中,分析器还被配置为响应于物理条件的改变而重新初始化,该改变包括以下项中的至少一个或多个:轮胎状况改变、轮胎旋转、轮胎更换、轮胎修理、轮胎压力监测系统传感器更换以及在多个车轮中的至少一个车轮上的多个编码器中的对应一个编码器的故障情况。
6.在振动监测系统的一个或多个实施例中,分析器还配置有一组启用条件,以确保稳健决策,该启用条件包括以下项中的至少一个或多个:压力阈值内的轮胎压力、摩擦制动器未接合、牵引控制无效、加速度阈值内的加速度、由于制造不存在而引起的过渡改变、不存在保养、不存在延长停车以及传感器有效性。
7.在振动监测系统的一个或多个实施例中,分析器还被配置为使用输入相量阵列和响应相量阵列而产生用于多输入单输出分析的多个矩阵。
8.在振动监测系统的一个或多个实施例中,分析器还被配置为将多个矩阵的多个条目(entry)分组为多个低速仓(low-speed bin)和多个高速仓(high-speed bin)。
9.在振动监测系统的一个或多个实施例中,分析器还被配置为检查多个低速仓和多个高速仓中的多个矩阵的多个普通相干因子,以确认数据足以执行分类和隔离。
10.在振动监测系统的一个或多个实施例中,分析器还被配置为响应于多个矩阵而产生多个传递函数值,并且响应于多个传递函数值和多个矩阵而产生多个多重相干值以确认传递函数值的线性。
11.在振动监测系统的一个或多个实施例中,分析器还被配置为响应于多个低速仓和多个高速仓中的多个传递函数值来识别至少一个振动车轮。
12.在振动监测系统的一个或多个实施例中,识别至少一个振动车轮是响应于历史统计和隔离真值表中的一个或多个。
13.本文提供用于车轮振动监测的方法。方法包括用多个编码器产生用于多个车轮的多个脉冲串信号。多个编码器中的每个编码器联接到多个轮中的相应一个车轮并产生多个脉冲串信号中的单个脉冲串信号。方法还包括响应于多个脉冲串信号,用分析器来产生用于多个车轮的多个每转脉冲信号和多个角速度信号。多个每转脉冲信号中的每个传送相应车轮的每次旋转的单个脉冲。方法包括:产生表示由多个车轮引起的多个每转脉冲信号的输入相量阵列,产生表示由多个车轮引起的多个角速度信号的响应相量阵列,和响应于输入相量阵列和响应相量阵列而产生识别多个车轮中的至少一个振动车轮的报告。
14.在一个或多个实施例中,方法还包括响应于物理条件的改变而重新初始化分析器,该改变包括以下项中的至少一个或多个:轮胎状况改变、轮胎旋转、轮胎更换、轮胎修理、轮胎压力监测系统传感器更换以及在多个车轮中的至少一个车轮上的多个编码器中的对应一个编码器的故障情况。
15.在方法的一个或多个实施例中,用于确保分析器中的稳健决策的一组启用条件包括以下项中的至少一个或多个:压力阈值内的轮胎压力、摩擦制动器未接合、牵引控制无效、加速度阈值内的加速度、由于制造不存在而引起的过渡改变、不存在保养、不存在延长停车以及传感器有效性。
16.在一个或多个实施例中,方法还包括使用输入相量阵列和响应相量阵列产生用于多输入单输出分析的多个矩阵。
17.在一个或多个实施例中,方法还包括将多个矩阵的多个条目分组为多个低速仓和多个高速仓。
18.在一个或多个实施例中,方法还包括检查多个低速仓和多个高速仓中的多个矩阵的多个普通相干因子,以确认数据足以执行分类和隔离。
19.在一个或多个实施例中,方法还包括响应于多个矩阵产生多个传递函数值,以及响应于多个传递函数值和多个矩阵而产生多个多重相干值以确认传递函数值的线性。
20.在一个或多个实施例中,方法还包括响应于多个低速仓和多个高速仓中的多个传递函数值而识别至少一个振动车轮。
21.在方法的一个或多个实施例中,识别至少一个振动车轮是响应于历史统计和隔离真值表中的一个或多个。
22.在方法的一个或多个实施例中,多个车轮支撑移动的车辆。
23.本文中提供车辆。车辆包括多个车轮、多个编码器和分析器。多个车轮被构造成支撑车辆。多个编码器被配置为产生用于多个车轮的多个脉冲串信号。多个编码器中的每个编码器联接到多个车轮中的相应一个车轮并产生多个脉冲串信号中的单个脉冲串信号。分析器联接到多个编码器并且被配置为响应于多个脉冲串信号而产生用于多个车轮的多个
每转脉冲信号和多个角速度信号。多个每转脉冲信号中的每个每转脉冲信号在相应车轮的每次旋转传送单个脉冲。分析器还被配置为产生表示由多个车轮引起的多个每转脉冲信号的输入相量阵列,产生表示由多个车轮引起的多个角速度信号的响应相量阵列,并响应于输入相量阵列和响应相量阵列而产生识别多个车轮中的至少一个振动车轮的报告。
24.本发明还包括如下方案:方案1. 一种振动监测系统,其包括:多个编码器,其被配置为产生用于多个车轮的多个脉冲串信号,其中,所述多个编码器中的每个编码器联接到所述多个车轮中的相应一个车轮并且产生所述多个脉冲串信号中的单个脉冲信号串;和分析器,其联接到所述多个编码器并且被配置为响应于所述多个脉冲串信号而针对所述多个车轮来产生多个每转脉冲信号和多个角速度信号,其中,所述多个每转脉冲信号中的每个信号在相应车轮的每次旋转传送单个脉冲,产生表示由所述多个车轮引起的所述多个每转脉冲信号的输入相量阵列,产生表示由所述多个车轮引起的所述多个角速度信号的响应相量阵列,并响应于所述输入相量阵列和所述响应相量阵列而产生识别所述多个车轮中的至少一个振动车轮的报告。
25.方案2. 根据方案1所述的振动监测系统,其中,所述分析器还被配置为响应于物理条件的改变而重新初始化,所述改变包括以下项中的至少一个或多个:轮胎状况的改变、轮胎旋转、轮胎更换、轮胎修理、轮胎压力监测系统传感器更换以及在所述多个车轮中的至少一个车轮上的所述多个编码器中的相应一个编码器中的故障情况。
26.方案3. 根据方案1所述的振动监测系统,其中,所述分析器还配置有一组启用条件以确保做出稳健决策,所述一组启用条件包括以下项中的至少一个或多个:压力阈值内的轮胎压力、摩擦制动器未接合、牵引控制无效、加速度阈值内的加速度、由于制造不存在而引起的过渡改变、不存在保养、不存在延长停车以及传感器有效性。
27.方案4. 根据方案1所述的振动监测系统,其中,所述分析器还被配置为使用所述输入相量阵列和所述响应相量阵列来产生用于多输入单输出分析的多个矩阵。
28.方案5. 根据方案4所述的振动监测系统,其中,所述分析器还被配置为将所述多个矩阵的多个条目分组为多个低速仓和多个高速仓。
29.方案6. 根据方案5所述的振动监测系统,其中,所述分析器还被配置为检查所述多个低速仓和所述多个高速仓中的所述多个矩阵的多个普通相干因子,以确认数据充分性,以执行分类和隔离。
30.方案7. 根据方案6所述的振动监测系统,其中,所述分析器还被配置为响应于所述多个矩阵而产生多个传递函数值,并且响应于所述多个传递函数值和所述多个矩阵而产生多个多重相干值以确认所述传递函数值的线性。
31.方案8. 根据方案7所述的振动监测系统,其中,所述分析器还被配置为响应于所述多个低速仓和所述多个高速仓中的所述多个传递函数值来识别所述至少一个振动车轮。
32.方案9. 根据方案8所述的振动监测系统,其中,所述至少一个振动车轮的所述识别是响应于历史统计和隔离真值表中的一者或多者。
33.方案10. 一种用于车轮振动监测的方法,其包括:用多个编码器产生用于多个车轮的多个脉冲串信号,其中,所述多个编码器中的
每个编码器联接到所述多个车轮中的相应一个车轮,并产生所述多个脉冲串信号中的单个脉冲串信号;响应于所述多个脉冲串信号,用分析器产生用于所述多个车轮的多个每转脉冲信号和多个角速度信号,其中,所述多个每转脉冲信号中的每者在所述相应车轮的每次旋转传送单个脉冲;产生表示由所述多个车轮引起的所述多个每转脉冲信号的输入相量阵列;产生表示由所述多个车轮引起的所述多个角速度信号的响应相量阵列;和响应于所述输入相量阵列和所述响应相量阵列,产生识别所述多个车轮中的至少一个振动车轮的报告。
34.方案11. 根据方案10所述的方法,其还包括响应于物理条件的改变而重新初始化所述分析器,所述改变包括以下项中的至少一个或多个:轮胎状况的改变、轮胎旋转、轮胎更换、轮胎修理、轮胎压力监测系统传感器更换以及在所述多个车轮中的至少一个车轮上的所述多个编码器中的相应一个编码器的故障情况。
35.方案12. 根据方案10所述的方法,其中,确保所述分析器中的稳健决策的一组启用条件包括:压力阈值内的轮胎压力、摩擦制动器未接合、牵引控制无效、加速度阈值内的加速度、由于制造不存在而引起的过渡改变、不存在保养、不存在延长停车以及传感器有效性。
36.方案13. 根据方案10所述的方法,其还包括使用所述输入相量阵列和所述响应相量阵列来产生用于多输入单输出分析的多个矩阵。
37.方案14. 根据方案13所述的方法,其还包括将所述多个矩阵的多个条目分组为多个低速仓和多个高速仓。
38.方案15. 根据方案14所述的方法,其还包括:检查所述多个低速仓和所述多个高速仓中的所述多个矩阵的多个普通相干因子,以确认数据充分性,以执行分类和隔离。
39.方案16. 根据方案15所述的方法,其还包括:响应于所述多个矩阵而产生多个传递函数值;和响应于所述多个传递函数值和所述多个矩阵,产生多个多重相干值,以确认所述传递函数值的线性。
40.方案17. 根据方案16所述的方法,其还包括响应于所述多个低速仓和所述多个高速仓中的所述多个传递函数值来识别所述至少一个振动车轮。
41.方案18. 根据方案17所述的方法,其中,所述至少一个振动车轮的所述识别是响应于历史统计和隔离真值表中的一者或多者。
42.方案19. 根据方案10所述的方法,所述多个车轮支撑移动的车辆。
43.方案20. 一种车辆,其包括:多个车轮,其被配置为支撑所述车辆;多个编码器,其被配置为产生用于所述多个车轮的多个脉冲串信号,其中,所述多个编码器中的每个编码器联接到所述多个车轮中的相应一个车轮并且产生所述多个脉冲串信号中的单个脉冲信号串;和分析器,其联接到所述多个编码器并且被配置为响应于所述多个脉冲串信号而针对所述多个车轮来产生多个每转脉冲信号和多个角速度信号,其中,所述多个每转脉冲信
号中的每者在相应车轮的每次旋转传送单个脉冲,产生表示由所述多个车轮引起的所述多个每转脉冲信号的输入相量阵列,产生表示由所述多个车轮引起的所述多个角速度信号的响应相量阵列,并响应于所述输入相量阵列和所述响应相量阵列而产生识别所述多个车轮中至少一个振动车轮的报告。
44.当结合附图时,根据用于实施本公开的最佳模式的以下详细描述,本公开的以上特征和优点以及其他特征和优点将显而易见。
附图说明
45.图1是示出车辆的示意性平面图。
46.图2是根据示例性实施例的用于车辆的车轮的简化的四分之一轿车模型的示意性透视图。
47.图3是根据示例性实施例的不平衡质量的模型的示意图。
48.图4是根据示例性实施例的车轮的传递函数的曲线图。
49.图5是根据示例性实施例的编码器的实施方式的示意性侧视图。
50.图6是根据示例性实施例的作为轮胎刚度的函数的车轮的功率谱密度的曲线图。
51.图7是根据示例性实施例的作为未悬挂质量(unsprung mass)的函数的车轮的功率谱密度的曲线图。
52.图8是根据示例性实施例的展现不同车轮阶次的角速度信号的离散傅立叶变换的曲线图。
53.图9是根据示例性实施例的振动检测方法的流程图。
54.图10是根据示例性实施例的隔离方法的流程图。
具体实施方式
55.本公开的实施例总体上提供振动分析方法和系统,其检测由于质量失衡和/或力变化而在机动车辆的每个角部处的车轮组件的振动。源相量和响应相量都可以通过公共编码器信号源构建。振动分析通常利用阶次跟踪(order tracking),其包括编码器信号的离散傅立叶变换、一阶相量的提取、多输入多输出分析(或多个多输入单输出分析)、一个或多个可疑角部的检测和隔离。
56.单个编码器信号可在每个车轮处产生多个每转脉冲信号(例如,脉冲串信号)。通常,每个编码器信号用于构造用于各个车轮的每转脉冲信号(例如,单个每转脉冲)。方法和系统对于通常客户使用情况(例如,轮胎更换事件、临时平斑等)可为稳健,以便不触发错误的出错报告。方法和系统还可以提供隔离逻辑,其通过结合x-of-y方法和滞后来稳健地抵抗错误假阳性/假阴性。
57.参考图1,示出说明车辆90的示意性平面图。车辆90通常包括多个车轮92a-92d和振动监测系统100。振动监测系统100通常包括多个编码器102a-102d和分析器104。
58.车辆90可以被实现为汽车(或轿车)。在各种实施例中,车辆90可以包括但不限于乘用车、卡车、自动驾驶车辆、汽油动力车辆、电动车辆、混合动力车辆、摩托车、单轴拖车和/或多轴拖车。在其他实施例中,车辆90是具有在多个轴上一起行进的多个旋转车轮的装置,其中,车轮不平衡的车载检测将有用。可以实施其他类型的车辆90以满足特定应用的设
计标准。
59.车轮92a-92d可以实现行走车轮。车轮92a-92d通常可经操作以提供车辆90在地面上的支撑和移动。在各个实施例中,每个车轮92a-92d可包括安装在轮辋上的轮胎。车轮92a-92d可用于在车辆90与车辆90所置于的地面之间提供牵引力。
60.振动监测系统100可以使用车载角轮速度编码器102a-102d以产生脉冲串信号。车载分析器104可以从脉冲串信号来构造每转脉冲信号。分析器104还可以从脉冲串信号为车轮92a-92d中的每个构造角速度信号。每转脉冲信号可用于提取源信号的轮胎一阶相量。脉冲串信号也可以用作响应信号。分析器104和编码器102a-102d通常消除附接到车辆90的外部安装的仪器和/或附加硬件,该仪器和/或附加硬件监测车轮振动并识别振动车轮92a-92d。
61.分析器104可以在限定的准静态速度范围(包括在较低速度范围和较高速度范围下)下使用多输入多输出分析或多个多输入单输出分析来执行编码器信号的阶次跟踪。在各种实施例中,可以实现多输入多输出分析。在其他实施例中,可以实现多输入单输出分析。阶次跟踪方法可以在多输入多输出分析中具有减少数量的逆操作。阶次跟踪方法可以利用预初始化的旋转因子(twiddle factor)来更快地执行离散傅立叶变换。
62.振动监测系统100被设计为具有一组启用条件,以确保决策的稳健性。启用标准可以包括在标称轮胎压力的校准上阈值和下阈值之内的轮胎压力,因为轮胎压力的改变可以导致轮胎刚度的改变,这可以导致未悬挂质量的共振频率的改变。另一个启用标准可以包括摩擦制动器不接合以确保制动器脉动振动不有助于轮胎车轮振动分析。另一个启用标准可以包括车辆90的牵引控制系统未激活,因为牵引控制系统可以将附加外部扭矩施加到一个或多个车轮。另一个启用标准可以包括在校准的阈值内的车辆速度,因为轮胎振动的影响可以在特定的速度范围内是显著的。另一个启用标准可以包括在校准阈值之内的车辆纵向加速度,因为加速度的改变可影响系统的稳态评估。另一个标准可以包括在车辆拥有者的前几百公里内禁用振动监测系统100,以消除可由于制造过程而已经产生的临时变化和平斑(flat spot)。附加标准可以包括:在车辆90已经静止的时间大于校准阈值的情况下或者已对轮胎/车轮组件进行改变时的禁用振动监测系统100。当车辆90已经以超过校准速度行驶校准时间时,可以重新启用振动监测系统100。此标准可以确保振动监测系统100不由于延长停车或保养过程引起的临时平斑而触发假阳性(false positive)。附加启用标准可以包括在通信网络上接收的轮胎压力监测系统的信号、摩擦制动压力信号、车辆速度信号、纵向加速度信号和车辆里程表信号的有效性,以确保振动监测系统100对系统故障是稳健的。
63.振动监测系统100通常被设计为具有智能重新初始化特征,其可以自动检测特定使用情况,例如轮胎/车轮系统的改变,并触发数据的重新初始化(除了车辆90的首次初始化外)。振动监测系统100可以使用由轮胎压力监测系统产生的压力信号来检测是否已经发生放气事件且然后重新初始化系统(例如,如果轮胎、轮辋或轮胎修理有改变情况,则重新启动)。轮胎压力监测系统的自动定位功能还可用于检测是否已经发生新的轮胎压力监测系统传感器安装和/或轮胎旋转,并随后重新初始化系统。振动监测系统100还可以检测编码器102a-102d之间是否存在故障,并执行重新初始化。最后,如果服务人员或操作员希望重新初始化振动监测系统100,则可以执行手动系统重新初始化。可以进行重新初始化以确
保振动监测系统100提供对当前物理条件的准确评估。
64.编码器102a-102d可以实现车轮速度传感器。每个编码器102a-102d可被连接到车轮92a-92d中的相应一个车轮并随其旋转。编码器102a-102d通常可操作以产生脉冲串信号。每个脉冲串信号可以传达脉冲的序列。对于相应车轮92a-92d的每次旋转,可以产生多个脉冲。例如,每个编码器102a-102d可以为相应车轮92a-92d的每次旋转产生整数个脉冲(例如,n)。脉冲的频率通常基于相应车轮92a-92d的旋转速度。
65.分析器104可以实现一个或多个微控制器。分析器104通常可操作以响应于脉冲串信号而产生用于车轮92a-92d的多个每转脉冲信号和多个角速度信号。可以为每个相应车轮92a-92d产生每转脉冲信号。每个每转脉冲信号可在相应车轮92a-92d的每次旋转传送单个脉冲。分析器104还可操作以产生表示由车轮92a-92d引起的多个每转脉冲信号的输入(源)相量阵列,并产生表示由车轮92a-92d引起的角速度信号的响应相量阵列。分析器104还可操作以响应于在多输入多输出分析或多个多输入单输出分析中使用的输入相量阵列和响应相量阵列产生报告,该报告识别车轮92a-92d中的至少一个振动车轮。
66.每个微控制器可以包括一个或多个处理器,其中的每个可以实施为独立处理器、专用集成电路(asic)、现场可编程门阵列(fpga)或专用电子控制单元。微控制器可以包括有形的非暂时性存储器(例如,只读存储器、非易失性存储器和/或闪存)。可以在微控制器中实现高速时钟或计时器、模数和数模电路以及输入/输出电路和装置以及适当信号调节和缓冲电路形式的伴随硬件。
67.实施本公开的计算机可读和可执行指令可以被存储在存储器中并且如本文所阐述地被执行。可执行指令可以是用于在微控制器上运行应用程序的一系列指令。微控制器可以以从车辆90中的各种控制器和/或部件接收呈一个或多个输入信号的形式的命令和信息,并且通过一个或多个控制信号将指令传送给用户(或驾驶员)显示器和/或电诊断端口。
68.参考图2,根据示例性实施例示出车轮92a的示例简化的四分之一轿车模型110的示意性透视图。车轮92a可以被建模为质量块112,其通过弹簧114和阻尼器116与参考(例如,浮动质量块)118并联连接。质量块112还可以通过较小弹簧120连接,该较小弹簧表示从质量块112到地面122的轮胎柔度(tire compliance)。车轮92a可具有旋转速度ω。当车轮92a处于平衡状态时,可以通过相对于参考118保持静止的质量块112来模拟车轮92a的旋转。在车轮92a不平衡时,可以通过相对于参考118旋转的不平衡质量块113来模拟车轮92a的旋转(参见图3)。
69.参考图3,根据示例性实施例示出不平衡质量块113的示例模型130的示意图。模型130的x轴可以表示不平衡质量块113的水平运动。模型130的y轴可以表示不平衡质量块113的竖直运动。不平衡质量块113可以在以旋转速度ω下沿着轨道132移动。
70.参考图4,根据示例性实施例示出车轮92a的示例传递函数大小的曲线图140。曲线图140的x轴可以表示单位为英里每小时的车辆90的速度。曲线图140的y轴可以表示车轮92a相对于车辆90的传递函数大小,单位为每秒旋转数
×
102。
71.曲线142示出车轮92a处于平衡状态时车轮92a的传递函数大小。曲线144总体上示出在车轮92a稍微不平衡(例如,2盎司质量不平衡)时车轮92a的传递函数大小。曲线146可以示出在车轮92a适度地不平衡(例如4盎司质量不平衡)时车轮92a的传递函数大小。曲线148可以示出在力变化(例如20磅)的情况下车轮92a的传递函数大小。示例曲线144、146和
148中的不平衡质量通常示出每小时大约82英里的车轮92a的峰值传递(例如,振动)。可以基于不同的质量、刚度、阻尼和/或不同的质量失衡,用不同悬架配置来实现其他峰值速度和传递函数大小。
72.参考图5,根据示例性实施例示出编码器102a的示例性实施方式的示意性侧视图。编码器102a通常包括音轮150和传感器152。
73.音轮150可以被称为音环或磁阻器(reluctor)。音轮150可具有围绕车轮的周边间隔开的多个(例如,n个)齿(或多个n-s极)。单个音轮150可以连接到每个车轮92a-92d的旋转轴。当各个车轮92a-92d旋转时,音轮150的齿/极可移动经过传感器152。
74.传感器152可以实现磁传感器。单个传感器152可以在相应的音轮150附近连接至悬架的结构。在各种实施例中,传感器152可以是磁阻传感器或磁抗传感器。传感器152通常操作成响应于音轮150的齿移动经过传感器152而产生相应脉冲串信号154。
75.当音轮150旋转时,传感器152可以检测音轮150的齿/极与传感器152的自由端之间的间距改变。传感器可以响应于音轮150的齿/极的运动而产生脉冲串信号154。当音轮150的每个齿/极经过传感器152时,脉冲串信号154可以传送单个脉冲。音轮150的n个齿/极可以引起在采样时间期间每个车轮旋转的脉冲串信号154中的n个脉冲。
76.来自每个编码器102a-102d的脉冲串信号154可以被传送到分析器104。分析器104可以将每个脉冲串信号154转换成每转脉冲信号156。对于相应车轮92a-92d的每转,每个每转脉冲信号156可以具有单个脉冲。
77.参考图6,根据示例性实施例,针对给定的不平衡质量块113,示出作为轮胎刚度的函数的示例性功率谱密度的曲线图160。曲线图160的x轴可以表示单位为公里每小时的车辆90的速度。曲线图160的y轴可以表示单位为米2的相对于车辆90的车轮位移(例如92a)的功率谱密度。
78.曲线166通常示出具有基线刚度(或轮胎压力)的车轮92a的传递函数大小。曲线162可以示出在较高刚度(例如,+10%轮胎刚度)下车轮92a的传递函数大小。曲线164可以示出在较低的刚度(例如,-10%轮胎刚度)下车轮92a的传递函数大小。每条曲线162-166通常示出了车轮92a施加到车辆90的框架中的作为频率的函数的效果。轮胎刚度的改变通常改变未悬挂质量的共振频率和共振振幅。未悬挂的质量可以是车轮、悬架和其他直接连接的部件的质量。
79.参考图7,根据示例性实施例,对于给定不平衡质量块113,示出车轮的作为未悬挂质量的函数的示例性功率谱密度的曲线图180。曲线图180的x轴可以表示车辆90的速度,单位为公里每小时。曲线图180的y轴可以表示单位为米2的相对于车辆90的车轮位移(例如92a)的功率谱密度。
80.曲线186通常示出基线未悬挂质量的传递函数大小。曲线182可以示出较低未悬挂质量(例如,-10%未悬挂质量)的传递函数大小。曲线184可以示出较高未悬挂质量(例如,+ 10%未悬挂质量)的传递函数大小。每个曲线182-186总体上示出未悬挂质量施加到车辆90的框架中的作为频率的函数的功率。未悬挂质量的改变通常改变未悬挂质量的谐振频率和谐振幅度。
81.振动分析方法通常具有多个可校准仓(例如,几个低速仓和几个高速仓),以适应未悬挂质量和轮胎刚度的改变。振动分析方法还可以通过考虑决策的历史来隔离可疑角
部,以对引起振动的可疑角部做出统计上可信的结论。
82.参考图8,根据示例性实施例示出展现不同车轮阶次的角速度信号的示例性离散傅立叶变换的曲线图190。曲线图190的x轴可以表示单位为赫兹的振动频率。曲线图190的y轴可以表示单位为每秒旋转数
×
102的车轮92a相对于车辆90的振幅。
83.曲线192通常说明车轮92a的振动。可以由分析器104通过每转脉冲信号156计算轮胎旋转频率(例如,在示例中为15赫兹)。可以为每转脉冲信号156和响应角速度信号两者提取与频率相对应的一阶相量含量194。在分析中可以使用每转脉冲信号156和角速度信号两者的一阶相量含量194。
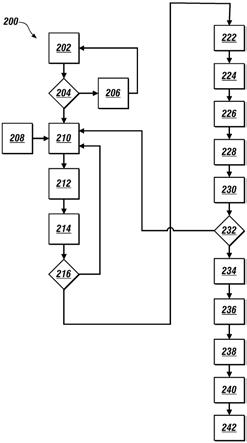
84.参考图9,根据示例性实施例示出示例振动检测方法200的流程图。方法(或过程)200可以由振动监测系统100实施。方法200通常包括步骤202、步骤204、步骤206、步骤208、步骤210、步骤212、步骤214、步骤216、步骤222、步骤224、步骤226、步骤228、步骤230、步骤232、步骤234、步骤236、步骤238、步骤240和步骤242。步骤的顺序示出为代表性示例。可以实施其他步骤命令以满足特定应用程序的标准。
85.振动检测可以在步骤202中开始。在步骤204中,分析器104可以检查重置事件,其由于以下项而被触发:轮胎放气事件(轮胎、轮辋更换或轮胎修理)、新的轮胎压力监测系统传感器、轮胎旋转、手动系统重置或编码器102a-102d功能不正常(或有问题)。如果发生上述事件中的一个或多个,则在步骤206中可以擦除来自分析器104的数据并且方法200返回到步骤202。
86.如果编码器102a-102d正确地操作,则编码器102a-102d可以在步骤208中产生脉冲串信号154并将其呈现给分析器104。分析器104可以在步骤208中对脉冲串信号154加时间戳。然后,在步骤210中,分析器104从脉冲串信号154和时间戳产生每个车轮92a-92d的每转脉冲信号156和角速度信号。
87.在步骤212中,分析器104可以缓冲角速度信号和每转脉冲信号156的多个(例如128、256、512或1024)样本。在步骤214中,启用条件可由分析器104评估。启用条件可以包括以下:车辆90的轮胎压力在校准的上限和下限阈值之内;车辆90的摩擦制动器未接合;车辆90的牵引控制系统未激活;车辆90的速度在校准的上阈值和下阈值之内;车辆90的加速度在校准的上阈值和下阈值之内;车辆90的里程表大于校准的阈值;在车辆已经静止大于校准阈值的时间之后或者在更换车辆90的轮胎/车轮组件之后的时间段内,车辆90的速度已经超过校准阈值达校准时间;车辆90的轮胎压力监测信号、摩擦制动压力信号、车辆速度信号、加速度信号和车辆里程表信号的有效性。如果按照步骤216不满足启用条件中的一个或多个,则方法200可以返回到步骤210。如果按照步骤216满足启用条件,则方法200可以以步骤222继续。
88.可以将缓冲的数据变换到频域中,并且提取一阶内容的相量。在步骤222中,分析器104可以使用汉宁窗(hanning window)和50%重叠标准来计算角速度信号和每转脉冲信号156的离散傅立叶变换。例如,可以从0到2.56秒获取第一记录,从1.28到3.84秒获取第二记录,且从2.56到5.12秒获取第三记录。在步骤224中,分析器104可以从离散傅立叶变换中提取一阶相量。
89.可以提取一阶相量,以包括来自每个每转脉冲信号156和角速度信号中
‘
n’个点。可以选择这些点,使得包括峰值频率。基于选定的
‘
n’个点,通常根据如下的等式1创建相应
角部组件的输入相量阵列x和响应相量阵列y,如下所示:等式(1)其中
‘
p’表示轮胎/车轮组件的数量。
90.为了方便计算,按照如下的等式2将输入相量x
i’归一化为单位大小:
ꢀꢀꢀ
等式(2)其中(.)
*
表示复共轭转置或hermitian转置。
91.输入相量和响应相量可以按照如下的等式3和4进行并置:
ꢀꢀ
等式(3)
ꢀꢀ
等式(4)输入相量阵列x可以是n
×
p,其具有组织每转信号156的脉冲的输入相量量的复数项。响应相量阵列y通常是n
×
p,其具有组织角速度信号的响应相量量的复数项。
92.分析器104通常在时域中记录计数记录且然后将计数记录转换成与车轮92a-92d的旋转对应的频域。因此,作为相量量,等式3的输入相量阵列x的每个条目都以的格式。在此,e是指数数,i是虚数,而是相对于车轮旋转的角度位置。
93.分析器104可以产生在等式4中的y1…yp
数据点。数据点y1…yp
可以转换为频域且转换为呈格式的相量量。响应相量阵列y的行通常表示与输入相量阵列x的行对应的各个时间记录。因此,等式4的响应相量阵列y的每个条目呈作为相量量的格式。在此,e是指数,i是虚数,而是在车轮92a-92d中的至少一个车轮中产生的振动的相位。
94.x和y相量阵列通常用于在步骤226中使用如下的等式5、6和7进行递归更新自相关矩阵和互相关矩阵s
xx
、s
xy
和s
yy
以进行多输入多输出分析:等式(5) 等式(6)
ꢀꢀ
等式(7)
其中表示先前计算的矩阵。
95.在步骤228中,可以通过分析器104将s矩阵条目分组到各自的速度仓中。为了增加所产生的相量的精度,通常将车辆90驱动足够长的时间,使得车轮92a-92d相对于彼此异相(phased out )。这确保s
xx
矩阵不是奇异的(singular)并且车轮每转脉冲信号156是可区分的。确定这种情况的度量是普通相干性(或数据充分性标准),它是输入信号的互相关与自相关的比率。交叉分量值的相干性可以按照如下的公式8计算:等式(8)可以在步骤230中执行对普通相干性的检查。普通相干性阵列是pxp对称阵列,其中每个元素表示多个每转脉冲信号与每对轮胎车轮组件和它们本身的相关性。在步骤232中,可以将普通相干值与第一阈值(例如0.3)进行比较。如果相干值中的一个或多个相干值大于第一阈值,则方法200可以返回至步骤210。如果相干值中的每个小于或等于第一阈值,则方法200可以以步骤234继续。
96.在步骤234中,分析器104可以根据等式9计算传递函数h,其中主对角线的每个元素表示大小由表示的对应角部的传递函数相量。
97.等式(9)在步骤234中计算确保系统线性的标准。将其理解为确保系统是线性的多重相干性(线性标准)。多重相干性可具有在0到1之间的值。值1通常表示系列中的输入与输出线性相关,而值0可指示其中没有一个输入与输出相关。多重相干性是一个p
×
p阵列,其主对角线元素指示特定角部处的何种振动水平归因于对应角部组件。多重相干性可以通过如下的等式10计算: 等式(10)在步骤236中,可以将多重相干值的主对角线的元素的大小与第二阈值(例如0.7)比较。对于值中的每个小于第二阈值,则在步骤236中将对应传递函数大小设置为“不可用”并且方法200可以以步骤238继续。
98.在步骤238中,可以通过分析器104将高速传递函数大小和低速传递函数大小分配到校准速度仓阵列的启用的仓(enabled bin)。仓通常经选择,使得低速仓对应于线性操作范围并且高速仓对应于车辆90的未悬挂质量的共振速度。在步骤240中,分析器104可以使用启用的仓中的值来隔离振动车轮92a-92d。当发现振动车轮92a-92d(例如,具有过度和一致振动的车轮)时,分析器104可以在步骤242中产生报告。报告可以呈对车辆90的驾驶员的指示和/或可通过车辆90的诊断端口读取的电子记录的形式。
99.参考图10,根据示例性实施例示出示例隔离方法260的流程图。方法(或过程)260可以由振动监测系统100实现。方法260可以实现图9中所示的步骤240。方法260通常包括步骤262、步骤264、步骤266、步骤268、步骤270、步骤272、步骤274、步骤276、步骤278、步骤280、步骤282、步骤284、步骤286、步骤288、步骤290、步骤292、步骤294、步骤296、步骤298、
步骤300、步骤302、步骤304、步骤306、步骤308、步骤310、步骤312、步骤314、评估316、评估317、评估318和评估319。步骤的顺序示出为代表示例。可以实施其他步骤命令以满足特定应用程序的标准。方法260通常提供振动车轮92a-92d的分类和/或隔离。分类可以指示振动车轮在哪里超过或不超过阈值。分类的结果可以包括真实条件、错误条件和不可用条件。
100.在步骤262中,传递函数大小的速度范围可以由分析器104考虑。如果特定的速度范围被认为是高速值,则根据等式11将变量分配有传递函数大小的值且方法可以以步骤264继续。
101.ꢀꢀꢀ
等式(11)如果特定的速度范围被认为是低速值,则根据等式12变量被分配有传递函数大小的值且方法可以以步骤272继续。
102.ꢀꢀ
等式(12)可以在步骤264、266和268中在评估264中分别评估各个高速值。可以在步骤264中将单个高速值与高速阈值(例如)比较。如果高速值小于或等于高速阈值,则在步骤266中可以将高速值标记为低值。如果高速值大于高速阈值,可以在步骤268中将高速值标记为高值。
103.在步骤270中,可以进行检查以确定几个(例如,l个)数据项是否已经填充高速仓阵列。如果不是,则方法260可以以步骤286继续。如果为是,则方法260可以以步骤280继续。
104.可以通过步骤280、282、284、288、290和292执行滞后评估318。可以在步骤280中执行检查,以查看隔离方法260是否对最后高速仓值(hsb)产生“真”决定。如果不是,则方法260可以以步骤282继续。如果为是,则方法260可以以步骤284继续。
105.在步骤282中,可以执行检查以确定的最后l个值中的i1或更大是否被标记为高,并且 的最后j1个值是否被标记为高。如果为真,则在步骤288中可以将高速仓值(hsb)标记为真。如果为假,则可以在步骤290中将高速仓值(hsb)标记为假。
106.在步骤284中,可以执行检查以确定的最后l个值中的i2或更大值是否被标记为低,并且的最后j2个值是否被标记为低。如果为假,则在步骤292中可以将高速仓值hsb标记为“真”。如果为“真”,则可以在步骤290中将高速仓值hsb标记为“假”。直接从步骤270到达步骤286的高速值可以不被认为是真或假并且高速仓值hsb被标记为不可用。在步骤294中,来自滞后评估318的高速仓值(hsb)可用于更新高速仓输出缓冲器。方法260可随后以步骤312继续。
107.返回步骤262,如果传递函数大小为低速值,则可以在步骤272、274和276中在评估317中分别评估各个低速值。可以在步骤272中将各个低速值与低速阈值进
行比较(例如,)。如果低速值小于或等于低速阈值,则在步骤274中可以将低速值标记为低值。如果低速值大于低速阈值,则在步骤276中可以将低速值标记为高值。
108.在步骤278中,可以进行检查以确定数据项中的l个数据项是否已经填充低速仓阵列。如果不是,则方法260可以以步骤308继续。如果为是,则方法260可以以步骤296继续。
109.可以通过步骤296、298、300、302、304和306执行滞后评估319。可以在步骤296中执行检查,以查看隔离方法260是否对最后一个低速仓值(lsb)产生“真”决定。如果为否,则方法260可以以步骤298继续。如果为是,则方法260可以以步骤300继续。
110.在步骤298中,可以执行检查以确定的最后l个值中的i1或更多个值是否被标记为高,并且的最后j1个值是否被标记为高。如果为真,则在步骤302中可以将低速仓值(lsb)标记为真。如果为假,则可以在步骤304中将低速仓值(lsb)标记为假。
111.在步骤300中,可以执行检查以确定的最后l个值中的i2或更多值是否被标记为低,并且的最后j2个值是否被标记为低。如果为假,则在步骤306中可以将低速仓值lsb标记为真。如果为真,则可以在步骤304中将低速仓值lsb标记为假。直接从步骤278到达步骤308的低速值可以不被认为是真或假并且低速仓值lsb被标记为不可用。在步骤310中,来自滞后评估318的低速仓值(lsb)可以用于更新低速仓输出缓冲器。方法260可以随后以步骤312继续。
112.在步骤312中,可以使用隔离真值表来做出最终决定。提供示例隔离真值表,如下所示:隔离真值表当由隔离真值表确定最终决定时,分析器104可以在步骤314中产生报告。方法260
可以随后返回图9中的步骤210。
113.振动监测系统100可以使用用于输入强迫信号和输出响应信号的单个车轮编码器信号来检测车辆90的(一个或多个)角部处的内部振动,以有效地隔离和分类振动源。可以执行多输入多输出分析或几个多输入单输出分析,以对振动源进行隔离和分类。普通相干性阈值可用于确定数据充足性以执行分类和隔离。分段(在时间上)矩阵运算允许在嵌入式微控制器上的递归计算高效实现方式。轮胎/车轮组件的振动诊断可以使用车载传感器执行,而不是移除组件以进行非车载测试。此外,由于精确的诊断,振动监测系统100可以减少顾客的经常性访问。
114.虽然已经详细描述用于执行本公开的最佳模式,但是与本公开相关的领域的技术人员将认识到在所附权利要求的范围内的用于实践本公开的各种替代设计和实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1