一种用于建筑监测的无人机测量系统的制作方法
1.本发明涉及工程测量技术领域,具体涉及一种用于建筑监测的无人机测量系统。
背景技术:
2.建筑业是我国的传统行业,在国民经济中占有重要地位。在建筑工程领域中,施工单位需要在整个建筑施工周期中对施工进度、施工质量以及施工安全进行全方位监管。而目前的监管方式主要依靠人工,根据工人利用卷尺、测距仪等仪器测量建筑占地面积、楼层高度等数据,判断施工进度是否正常、质量是否达标。人工作业劳动强度大,工序繁多,耗时耗力,尤其对于结构特别复杂的建筑的特殊部位或者超高层建筑,人工操作难度大,测量精度无法保证,而且存在很高的安全风险。
3.随着无人机技术发展的日益成熟,无人机也被引入到建筑测量领域中用于完成自动实时监测,如公布号为cn111688939a的发明专利就公开了一种工程测量用无人机,该无人机上安装了集多种测量传感器于一体的工程测量头以及用于定位和导航用雷达,通过无人机自主飞行控制完成建筑工程数据测量,相比于传统人工测量在精度和效率上均有大幅度提升。无人机测量主要涉及智能决策、环境感知和运动控制三个部分,其中环境感知是借助一套性能强大的传感器来采集数据,然后由智能决策模块进行逻辑运算处理,运动控制部分主要用于控制飞行器的飞行。
4.无人机测量需要借助模型来根据采集的数据进行全局地图构建,然后运用各种算法对构建出的建筑场景地图进行计算求得所需测量参数。因此,除了硬件结构上需要配备高性能的飞行器以及性能强大的传感器外,在软件架构设计上更需要考虑数据处理的速度、可靠性以及功能性的拓展,本发明所提出的无人机测量系统就重点对软件架构设计进行了改进,本案由此而生。
技术实现要素:
5.本发明公开一种用于建筑监测的无人机测量系统,具有测量精度高、环境适应性强、可开发性和可拓展性强、可靠性高的特点,具体采用如下技术方案实现:一种用于建筑监测的无人机测量系统,分为硬件结构和软件结构,所述硬件结构包括无人机平台、安装在无人机平台上的挂载传感器、数据传输设备以及地面工作站,无人机平台包括飞行器、飞行控制器和机载运算器,挂载传感器采集数据以及飞行控制信息通过数据传输设备发送给地面工作站,地面工作站对接收到的信息进行实时分析处理和显示;所述软件结构采用mvc框架与ros框架相结合的架构,即软件结构包括视图层、模型层、控制层以及可拓展算法层,各层之间的通信交互按照ros通信机制进行;所述视图层包含了挂载传感器获取的传感器信息显示、飞行器姿态消息的回传显示以及用户gui交互界面;模型层包含了飞行器的逻辑控制运算,控制层包含了飞行器的飞控控制层,可拓展算法层内嵌算法工具包,算法工具包里嵌入所需的视觉算法,视觉算法通过传感器获取的图像作为输入,进行视觉处理后把逻辑控制交给模型层,模型层的输出给控制层用于无人机视觉自
动控制。
6.进一步,所述挂载传感器包括相机、激光雷达和惯性测量单元。
7.进一步,所述相机至少包括一个宽视场相机和一个窄视场相机。
8.进一步,所述相机配有增稳云台。
9.进一步,所述增稳云台采用二自由度结构。
10.进一步,所述地面工作站包括抗冲击和防水的设备箱,设备箱内安装计算机。
11.进一步,所述计算机采用无风扇散热结构,硬盘采用全固态硬盘。
12.进一步,所述计算机具体性能如下:cpu为broadwell架构的i7
‑
5500u,主频2.4g核心,显卡为hd5500,内存为4g ddr3l
‑
1600,硬盘为256g固态硬盘,网卡为realtek gigabit千兆网卡,300m双天线 wifi。
13.进一步,所述地面工作站采用市电和/或锂电池供电。
14.进一步,所述机载运算器和地面工作站中的计算机分别安装可拓展的算法工具包。
15.进一步,所述机载运算器中的算法工具包内包括:空间定位及建图算法、导航算法、规划控制算法;所述地面工作站中的算法工具包内包括:缺陷检测算法、目标识别算法。
16.进一步,所述控制层支持ar.drone、asctec、pixhawk飞控进行相互通信。
17.进一步,所述飞行控制器优选德国asctec公司的无人机开发运算平台,以及由美国3dr公司和瑞士联邦苏黎世理工学院联合开发的飞控plxhawk。
18.进一步,所述机载运算器配置intel i74核处理器,4gb ddr3内存,ssd存储器,搭载linux系统。
19.本发明所公开的无人机测量系统在硬件配置上具有测量精度高、环境适应性强、可满足建筑物室内外不同测量需求的特点;在软件结构设计上采用mvc框架与ros框架相结合的架构,具有强大的可开发性以及可拓展性,各模块之间采用ros通信机制建立通信关系,降低了各模块之间的耦合,能够提高整个测试系统在复杂环境中的可用性及可靠性。
附图说明
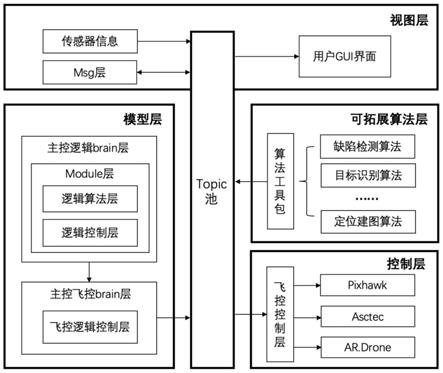
20.图1为本发明实施例中无人机测量系统原理框图;图2为本发明实施例中无人机测量系统软件架构框图。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
22.本实施例公开一种用于建筑监测的无人机测量系统,该测量系统分为硬件结构设计和软件结构设计两部分,硬件结构原理如图1所示,软件结构设计如图2所示,下面结合附图分别对两部分内容进行详细说明。
23.其中,硬件结构包括无人机平台、安装在无人机平台上的挂载传感器、数据传输设备以及地面工作站;无人机平台包括飞行器、飞行控制器和机载运算器。飞行器、挂载传感器及机载运算器用于提供传感器采集信息和飞行控制器信息,并通过数据传输设备将传感器采集信息及飞行控制器信息发送给地面工作站,地面工作站对接收到的信息进行实时分
析处理和显示。数据传输设备提供的数据传输方式包括但不限于无线wifi网络、点对点的无线数据链。
24.为提高测量精度,同时考虑到室内外测量通用,本实施例中的挂载传感器包括但不限于相机、激光雷达和惯性测量单元。所安装的相机至少包括一个宽视场相机和一个窄视场相机,且相机及镜头的参数可根据不同任务需要进行不同的选型配置,通过宽、窄视场相机协同工作,可以使无人机系统适用于室内、室外不同的测量场景,环境适应性更强。其中,挂载的相机还配有相机增稳云台,该增稳云台采用了二自由度结构,为相机提供横滚和俯仰两个方向的角度增稳功能,并且可以通过手动调整相机角度,使相机稳定工作在正射角度。
25.地面工作站的主要作用,一方面是为地面人员提供监视无人机状态和提供无人机操控的接口,另一方面是运行算法对接收到的传感器信息进行实时处理及显示。考虑到普通的移动工作站并不能完全满足同时监视无人机状态和高速运算以及室外条件下使用的需求,故为本实施例定制了集成度较高的专用地面工作站。该地面工作站可以对无人机飞行状态和第一视角的拍摄画面进行远程监控,能够运行算法控制无人机进行相应的飞行任务并本地完成建筑测量任务。考虑到室外的工作条件苛刻,地面工作站采用具有高强度、抗冲击、防水、防潮、防尘功能的设备箱作为整体外壳,设备箱内安装一台高性能的计算机,以满足视觉算法对计算性能的要求。考虑到地面工作站工作时可能的颠簸带来的影响,内部计算机采用了无风扇散热设计,硬盘也采用全固态硬盘,以保证计算机的防震性能。计算机具体性能如下:cpu为broadwell架构的i7
‑
5500u,主频2.4g核心,显卡为hd5500,内存为4g ddr3l
‑
1600,硬盘为256g固态硬盘,网卡为realtek gigabit千兆网卡,300m双天线 wifi。地面工作站可以采用220伏市电作为电源输入,也可以使用大容量锂离子电池作为室外使用时的电源输入且留有双电池接口,可以满足地面站长时间工作的需求。地面工作站下面板上的数码管显示器可以显示当前的电源电压,提醒用户及时更换电池。
26.考虑到无人机平台能够具备稳定的飞行特性,良好的二次开发特性,具备机载运算器的嵌入式开发的扩展性,本实施例中的无人机飞行控制器采用由德国asctec公司的无人机开发运算平台,以及美国3dr公司和瑞士联邦苏黎世理工学院联合开发的飞控pixhawk。该飞行控制器各项指标均符合新型飞控的要求,拥有优异的硬件性能及良好的控制效果(角速度误差<0.1
°
/s,角度误差<2
°
/s),具有gps航点飞行能力并且可以方便的针对不同监测任务进行二次开发。机载运算器配置intel i7 4核处理器,4gb ddr3内存,ssd存储器,搭载linux系统,其运算能力和存储能力与移动工作站类似,相关的算法在移动工作站上进行测试后移植到机载运算板。
27.本发明测试系统在软件架构设计上采用mvc框架与ros框架相结合的架构,即包括视图层、模型层、控制层以及可拓展算法层,各层之间的通信交互按照ros通信机制进行,可以降低各层之间的耦合度,提高整个测试系统在复杂环境中的可用性及可靠性。mvc框架使应用程序的输入、处理和输出分开,视图、模型和控制器各自处理自己的任务,mvc框架使得可开发性强,维护用户接口的技术含量降低。其中,视图层包含了挂载传感器获取的传感器信息显示、飞行器姿态消息的回传显示以及用户gui交互界面;模型层包含了飞行器的逻辑控制运算;控制层包含了飞行器的飞控控制层,控制层支持ar.drone、asctec、pixhawk等飞控进行相互通信;可拓展算法层内嵌算法工具包,算法工具包里嵌入完成建筑监测任务所
需的各种视觉算法,视觉算法通过相机获取的图像作为输入,进行视觉处理后把逻辑控制交给模型层,模型层的输出给控制层用于无人机视觉自动控制。机载运算器和地面工作站中的计算机分别安装可拓展的算法工具包,其中,机载运算器中的算法工具包内包括:空间定位及建图算法、导航算法、规划控制算法等;地面工作站中的算法工具包内包括:缺陷检测算法、目标识别算法等。算法工具包里的算法可根据不同任务需要进行拓展,以解决不同的实际测量问题。
28.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1