一种基于时差定位的水下耐压球壳结构损伤识别方法与流程
1.本发明涉及结构健康监测的技术领域,尤其涉及一种基于时差定位的水下 耐压球壳结构损伤识别方法。
背景技术:
2.潜水器作为人类探索海洋未知领域和维护海洋权益的大国重器,也在不断 的受到人们更多的关注,其所处的环境十分恶劣,承受着巨大的海水压力,在 水下作业时存在巨大风险,其中,耐压结构作为承载支撑平台,对于潜水器而 言极其重要,其结构的安全性是保障其正常工作的前提。耐压结构的损坏会直 接危及科研人员的生命和造成仪器设备失效,还会造成海洋环境的破坏。因此, 对耐压结构的健康监测显得十分重要,通过对耐压结构进行健康监测和安全评 估可以有效保障潜水器安全运行,降低危险事故发生的概率,潜水器的耐压结 构通常有圆柱形、圆锥形、球形、椭球形或者组合形,下潜深度大于800米的 潜水器耐压壳体大都采用球形结构。目前,对水下耐压结构进行结构健康监测 的技术主要是结构应力应变监测。
3.目前,大多数的lamb波损伤监测方法都是基于基准信号,即采用结构健 康状态下的响应信号作为基准信号,并用当前状态下的响应信号与基准信号相 减,从而得到结构的损伤状况。但由于基准信号与当前响应信号的采集时间不 同,采集时的外部条件,如周围环境温度、结构边界及应力状况、外部振动等 通常会发生变化,且内部条件,如传感器本身性能也会受到温度等因素影响, 使损伤散射信号很容易淹没在结构内部和外部条件变化所引起的信号变化和 噪声中,这不仅会使损伤检测难以得到准确结果,而且还影响在线监测的实时 性。
4.此外,当采集基准信号时,如果结构中已经存在损伤,基于基准信号的监 测方法将无法提取由该损伤产生的损伤散射信号,也就无法得到正确的损伤监 测结果;因此,有必要寻找一种布阵方式简单且个数较少,信号处理更简便的 无基准lamb波损伤监测方法。
技术实现要素:
5.本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较 佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或 省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略 不能用于限制本发明的范围。
6.鉴于上述现有存在的问题,提出了本发明。
7.因此,本发明提供了一种基于时差定位的水下耐压球壳结构损伤识别方法, 能够解决水下耐压结构的损伤定位和监测问题。
8.为解决上述技术问题,本发明提供如下技术方案:包括,在待测球壳结构 上布置压电传感器阵列,将所述压电传感器两个为一组并关于球心对称,共划 分为三组;在第一组里任选一个所述压电传感器作为激励源,将第二组和第三 组的四个所述压电传感器作
为信号接收源接收所述测球壳结构响应信号;在第 二组里任选一个所述压电传感器作为激励源,将所述第一组和第三组作为信号 接收源接收所述测球壳结构响应信号;在第三组里任选一个所述压电传感器作 为激励源,将所述第一组和所述第二组作为信号接收源接收所述测球壳结构响 应信号;获取接收的所述响应信号中由于损伤而产生的回波信号的时间差,并 根据时间差计算出损伤的位置。
9.作为本发明所述的基于时差定位的水下耐压球壳结构损伤识别方法的一 种优选方案,其中:包括,在所述待测耐压球壳结构的上、下、左、右、前、 后顶点共布置六个压电传感器阵列,其中,设置两个所述传感器为一组并关于 球心对称,共划分为三组,上下两个传感器为第一组,前后两个传感器为第二 组,左右两个传感器为第三组。
10.作为本发明所述的基于时差定位的水下耐压球壳结构损伤识别方法的一 种优选方案,其中:包括,在所述第一组里选择1号压电传感器作为信号激励 源,在所述待测结构中激励出lamb波,同时选择第二组和第三组四个传感器 作为信号接收源,分别采集得到对应于当前激励源的一对结构响应信号;随后 在所述第二组里选择2号传感器作为激励源,将所述第一组和所述第三组作为 信号接收源,采集得到对应于当前激励源的一对结构响应信号;随后在所述第 三组里选择3号传感器作为激励源,将所述第一组和所述第二组作为信号接收 源,采集得到对应于当前激励源的一对结构响应信号。
11.作为本发明所述的基于时差定位的水下耐压球壳结构损伤识别方法的一 种优选方案,其中:包括,获取每一组结构响应信号所对应的两个损伤散射信 号的时间差;分别观察所述每一对结构响应信号中的各自的损伤散射信号,判 断峰值的先后到达顺序,确定出所述时间差的正负性;计算出损伤位置与作为 接收器的一对压电传感器的距离。
12.作为本发明所述的基于时差定位的水下耐压球壳结构损伤识别方法的一 种优选方案,其中:包括,将1、2、3号压电传感器的坐标代入公式进行球坐 标系中弦长和圆心角的转换和圆心角、弧长的转换,求解出弦长转化为球壳结 构表面lamb波传递的实际弧长。
13.作为本发明所述的基于时差定位的水下耐压球壳结构损伤识别方法的一 种优选方案,其中:包括,将所述第二组传感器得到的时间差t1、第三组得到 的时间差t2、lamb波在待测球壳结构内传播的波速v以及求得的弧长s1、s2、 s3带入公式求解,得到损伤坐标(x,y,z)。
14.作为本发明所述的基于时差定位的水下耐压球壳结构损伤识别方法的一 种优选方案,其中:包括,将采集得到的所有结构响应信号进行归一化处理, 以消除各压电传感器性能差异带来的误差;所述归一化处理采用以下公式进行: y=x/x
max
其中,x为结构响应信号,x
max
为结构响应信号的最大值,y为归 一化后的结构响应信号。
15.作为本发明所述的基于时差定位的水下耐压球壳结构损伤识别方法的一 种优选方案,其中:包括,所激励lamb波信号为经过hanning窗调制的、中 心频率为200khz的五周期正弦波信号,通过信号发生器产生并经过功率放大 器放大后施加至激励传感器上,并通过数据采集卡采集对应接收传感器的信号 至计算机,进行数据处理和分析。
16.本发明的有益效果:本发明方法的阵列形式简单且个数较少,实验测量操 作简单,在无需基准信号的情况下,实现结构损伤的检测和监测,因此,不受 结构和外部条件发生变化而带来的影响,提高了结构损伤监测的准确性,且无 需大量的结构响应信号数据以及复杂的信号处理和计算步骤,具有良好的工程 应用可操作性。
附图说明
17.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需 要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的 一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下, 还可以根据这些附图获得其它的附图。其中:
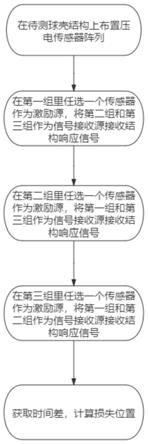
18.图1为本发明一个实施例所述的基于时差定位的水下耐压球壳结构损伤识 别方法的流程示意图;
19.图2为本发明一个实施例所述的基于时差定位的水下耐压球壳结构损伤识 别方法的球壳结构压电激励/传感阵列的示意图;
20.图3为本发明一个实施例所述的基于时差定位的水下耐压球壳结构损伤识 别方法的实验流程示意图;
21.图4为本发明一个实施例所述的基于时差定位的水下耐压球壳结构损伤识 别方法的采用五周期中心频率200khz的lamb波示意图;
22.图5为本发明一个实施例所述的基于时差定位的水下耐压球壳结构损伤识 别方法的2号和4号压电传感器接收到的结构相应信号示意图;
23.图6为本发明一个实施例所述的基于时差定位的水下耐压球壳结构损伤识 别方法的3号和6号压电传感器接收到的结构相应信号示意图。
具体实施方式
24.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合说明书 附图对本发明的具体实施方式做详细的说明,显然所描述的实施例是本发明的 一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通人员 在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明的 保护的范围。
25.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是本发明 还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不 违背本发明内涵的情况下做类似推广,因此本发明不受下面公开的具体实施例 的限制。
26.其次,此处所称的“一个实施例”或“实施例”是指可包含于本发明至少 一个实现方式中的特定特征、结构或特性。在本说明书中不同地方出现的“在 一个实施例中”并非均指同一个实施例,也不是单独的或选择性的与其他实施 例互相排斥的实施例。
27.本发明结合示意图进行详细描述,在详述本发明实施例时,为便于说明, 表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例, 其在此不应限制本发明保护的范围。此外,在实际制作中应包含长度、宽度及 深度的三维空间尺寸。
28.同时在本发明的描述中,需要说明的是,术语中的“上、下、内和外”等 指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述 本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、 以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第 一、第二或第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
29.本发明中除非另有明确的规定和限定,术语“安装、相连、连接”应做广 义理解,例如:可以是固定连接、可拆卸连接或一体式连接;同样可以是机械 连接、电连接或直接连
接,也可以通过中间媒介间接相连,也可以是两个元件 内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在 本发明中的具体含义。
30.实施例1
31.参照图1,为本发明的第一个实施例,提供了一种基于时差定位的水下耐 压球壳结构损伤识别方法,包括:
32.s1:在待测球壳结构上布置压电传感器阵列,将压电传感器两个为一组并 关于球心对称,共划分为三组。
33.s2:在第一组里任选一个压电传感器作为激励源,将第二组和第三组的四 个压电传感器作为信号接收源接收测球壳结构响应信号。
34.s3:在第二组里任选一个压电传感器作为激励源,将第一组和第三组作为 信号接收源接收测球壳结构响应信号。
35.s4:在第三组里任选一个压电传感器作为激励源,将第一组和第二组作为 信号接收源接收测球壳结构响应信号。
36.s5:获取接收的响应信号中由于损伤而产生的回波信号的时间差,并根据 时间差计算出损伤的位置。
37.具体的,参照图2和图3,本实施例还需要详细说明的是:
38.在待测耐压球壳结构的上、下、左、右、前、后顶点共布置六个压电传感 器阵列,其中,设置两个传感器为一组并关于球心对称,共划分为三组,上下 两个传感器为第一组,前后两个传感器为第二组,左右两个传感器为第三组。
39.在第一组里选择1号压电传感器作为信号激励源,在待测结构中激励出 lamb波,同时选择第二组和第三组四个传感器作为信号接收源,分别采集得 到对应于当前激励源的一对结构响应信号;
40.随后在第二组里选择2号传感器作为激励源,将第一组和第三组作为信号 接收源,采集得到对应于当前激励源的一对结构响应信号;
41.随后在第三组里选择3号传感器作为激励源,将第一组和第二组作为信号 接收源,采集得到对应于当前激励源的一对结构响应信号。
42.获取每一组结构响应信号所对应的两个损伤散射信号的时间差;
43.分别观察每一对结构响应信号中的各自的损伤散射信号,判断峰值的先后 到达顺序,确定出时间差的正负性;
44.计算出损伤位置与作为接收器的一对压电传感器的距离。
45.进一步的,计算损失位置包括:
[0046][0047]
[0048][0049][0050]
x2+y2+z2=r2[0051]
其中,v为波速,r为球半径;(x,y,z)为求得损伤坐 标;(x1,y1,z1)、(x2,y2,z2)、(x3,y3,z3)分别为为1号、2号、3号传感器坐 标,s1,s2,s3分别为1号、2号、3号传感器和损伤在球表面弧长的距离; θ1,θ2,θ3分别为s1,s2,s3所对应的圆心角;l1,l2,l3分别为s1,s2,s3所对 应的弦长;t1,t2分别为激发点直达波波峰到达时间和接收点第一个回波波峰 到达时间的间差。
[0052]
将1、2、3号压电传感器的坐标代入公式进行球坐标系中弦长和圆心角的 转换和圆心角、弧长的转换,求解出弦长转化为球壳结构表面lamb波传递的 实际弧长。
[0053]
将第二组传感器得到的时间差t1、第三组得到的时间差t2、lamb波在待 测球壳结构内传播的波速v以及求得的弧长s1、s2、s3带入公式求解,得到损 伤坐标(x,y,z)。
[0054]
将采集得到的所有结构响应信号进行归一化处理,以消除各压电传感器性 能差异带来的误差;
[0055]
归一化处理采用以下公式进行:y=x/x
max
[0056]
其中,x为结构响应信号,x
max
为结构响应信号的最大值,y为归一化后 的结构响应信号。
[0057]
所激励lamb波信号为经过hanning窗调制的、中心频率为200khz的五周 期正弦波信号,通过信号发生器产生并经过功率放大器放大后施加至激励传感 器上,并通过数据采集卡采集对应接收传感器的信号至计算机,进行数据处理 和分析。
[0058]
将步骤s3、步骤s4中所得数据按步骤s5重复一遍,最后将所得三组坐标 求平均值,即为最终损伤坐标。
[0059]
优选的,本实施例还需要说明的是,lamb波作为一种在工程中常用的检 测手段,具有衰减小、传播距离远、对微小损伤敏感、可以实现结构大面积主 动式在线监测,损伤监测结果精确可靠,在一定程度上检测到壳体结构中存在 的早期损伤并进行及时维护,可以避免结构失效和发生安全事故。
[0060]
实施例2
[0061]
参照图2~图6,为本发明的第二个实施例,该实施例不同于第一个实施例 的是,提供了一种基于时差定位的水下耐压球壳结构损伤识别方法的实验测试, 具体包括:
[0062]
(1)在一待测耐压球壳结构上,在其上下左右前后顶点共布置六个压电 传感器阵列,其中,两个为一组关于球心对称,共分为三组,上下两个传感器 为第一组,前后两个传感器为第二组,左右两个传感器为第三组。
[0063]
参照图2,压电激励/传感阵列共由6个压电陶瓷传感器构成,待测结构为 tc4钛合金材料球壳,球壳半径为200mm,厚度为5mm,以球心为坐标原点, 压电传感器坐标如表1所示;
[0064]
表1:压电传感器坐标(单位:mm)。
[0065][0066]
实验中的损伤形式设置为典型的腐蚀损伤,直径为5mm,圆心位置为(0,0), 单位为mm,在实验测量中,压电传感器通过环氧树脂胶粘贴在待测球壳结构 的表面并通过焊接引出正负极。
[0067]
(2)本发明的检测方法所使用的硬件部分与传统方法监测系统的硬件部 分相同,一般由以下部分组成:工业控制计算机、信号发生器、功率放大器、 数字示波器和数据采集卡,其中,激励信号通过信号发生器产生,经过功率放 大器后加载到激励源上,并通过调节频率来激励;结构响应信号通过将接收器 接收到的信号经数据采集卡采集后,统一进入计算机来进行分析;采样频率设 定为10mhz,采样点为10000个。
[0068]
(3)在第一组里选择1号传感器作为激励源,剩下2号、3号、5号、6 号四个传感器作为信号接收源接收结构响应信号,在第二组里选择2号传感器 作为激励源,1号、3号、4号、6号传感器作为信号接收源接收结构响应信号, 在第三组里选择3号传感器作为激励源,1号、2号、4号、5号传感器作为信 号接收源接收结构响应信号,分别采集得到1号、2号、3号激励源的结构响 应信号。
[0069]
参照图4,在本实施例中,激励信号为汉宁窗调制的5个周期正弦信号, 中心频率为200k hz,其时域波形和频域波形分别如图4所示,采用汉宁窗调 制的正弦信号,由此使得信号能量更集中,波形变化更稳定。
[0070]
参照图5和图6,当采用1号传感器作为激励源时,2号、5号压电传感器 接收到的信号如图5所示,3号、6号压电传感器接收到的信号如图6所示, 其中,直接传感信号是第一个波包峰值比较大,波形比较清晰的信号,损伤散 射信号是在后的波包峰值比较小的信号,根据图5和图6的示意,直接传感信 号与损伤散射信号明显分开,但有时两者是互相重叠的,这一对结构响应信号 2号、5号中的直接传感信号基本一致,而损伤散射信号有明显区别,这说明 待测结构中存在损伤且到两传感器的距离不相等,3号、6号接收到的信号也 是一样。
[0071]
应说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参 照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可 以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的精 神和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1