一种多模多频RTK定位通用终端
一种多模多频rtk定位通用终端
技术领域
1.本发明属于高精度卫星导航定位技术领域,具体涉及一种多模多频rtk定位通用终端。
背景技术:
2.随着科学技术的不断发展与进步,国民生产各行各业对精密定位技术的需求呈现日渐增长趋势。卫星导航定位技术具有应用范围广、定位精度高、系统灵活通用等优势被广泛应用,尤其是定位精度可达亚米级的rtk载波相位差分技术更是被工业生产、国防建设等重点领域广泛采用。因此,rtk载波相位差分技术正在日渐成为卫星导航定位技术不可或缺的关键构成。然而,传统的rtk定位终端通常仅支持单模单频卫星导航系统,即以单一gnss板卡为设计应用目标,其多系统多频段兼容应用能力较差。此外,传统的rtk定位终端的系统通用性具有局限性,其无法根据复杂多变的实际环境和工作条件及时、迅速调整配置,并且重新设计rtk定位终端势必会增加开发成本和开发周期。基于此,传统的rtk定位终端的低兼容性、低通用性、高成本、长开发周期等问题严重制约了rtk载波相位差分技术的应用,设计具有多模多频兼容能力、多gnss平台通用能力的新型rtk定位终端成为rtk载波相位差分技术急需突破的关键技术方向。
技术实现要素:
3.本发明的目的在于克服传统的rtk定位终端的低兼容性、低通用性、高成本、长开发周期等问题,提供了具有多模多频兼容能力、多gnss平台通用能力的一种多模多频rtk定位通用终端。
4.本发明的目的通过如下技术方案来实现:包括gnss定位单元、rtk定位差分信息交互单元、rtk定位解算单元、定位信息输出单元、导航状态显示单元与辅助单元;所述的gnss定位单元包括多模多频卫星天线和多平台gnss板卡;所述的多模多频卫星天线用于接收多频多模卫星信号,并传输给多平台gnss板卡;所述的多平台gnss板卡在接收到多频多模卫星信号后,实时解析获取gnss定位信息、速度信息和航向信息,并通过高速串口和以太网以冗余备份传输方式发送给rtk定位解算单元;所述的rtk定位差分信息交互单元通过4g网络获取来自于rtk基准站预先生成的rtk定位差分信息,然后将rtk定位差分信息通过高速串口发送给rtk定位解算单元;所述的rtk定位解算单元基于gnss定位信息和rtk定位差分信息,通过rtk定位算法完成rtk定位并生成rtk定位信息;所述的rtk定位解算单元内置实时时钟电路,统一所有采集信息的时间戳,然后将rtk定位信息以及来自于gnss定位单元的速度信息和航向信息统一打包发送给定位信息输出单元和导航状态显示单元;所述的定位信息输出单元将rtk定位信息以标准通信形式实时向用户广播发送;所述的定位信息输出单元具有双向通讯能力,预留信息输入通道通过rtk定位解算单元调节gnss定位单元和rtk定位差分信息交互单元的工作模式;所述的辅助单元为gnss定位单元、rtk定位差分信息交互单元、rtk定位解算单元、定位信息输出单元提供所需的稳定供电电压,并为rtk定位解算单
元内置的实时时钟电路供电。
5.本发明还可以包括:
6.所述的gnss定位单元分时兼容多款多模多频gnss板卡,包括精密定位测向gnss板卡ub4b0m、oem719、k708、p40和ub482,基于多模多频卫星天线可以实时解析卫星信号并获取到导航定位信息。
7.所述的rtk定位解算单元采用tl5728核心板,通过ttl高速串口与gnss定位单元、rtk定位差分信息交互单元以及定位信息输出单元通讯;所述的tl5728核心板的uart10与gnss定位单元的串口通讯获取gnss定位信息,tl5728核心板的uart8与rtk定位差分信息交互单元的uart1通讯获取rtk定位差分信息,tl5728核心板的uart2与定位信息输出单元的uart3通讯输出rtk差分定位信息;所述的tl5728核心板内置了实时时钟电路,通过统一标准时间戳为rtk差分定位信息、速度信息、航向信息添加时间戳实现时间统一化管理;所述的tl5728核心板与gnss定位单元通讯时,引入以太网接口作为备用通信回路,与ttl高速串口工作于冗余热备份模式;所述的tl5728核心板通过uart10向gnss定位单元的uart2发送参数模型配置指令,调整gnss定位单元的工作模式。
8.所述的定位信息输出单元通过can通讯、高速串口rs422、以太网对用户广播rtk差分定位信息,其中基于tl5728核心板的can控制器和can转换芯片sit233实现1路can总线接口,基于tl5728核心板的高速串口控制器和rs422转换芯片nsi83086实现2路高速串口rs422,,基于tl5728核心板的以太网控制器eth0、eth1和以太网转换芯片ar8035实现2路以太网通讯。
9.所述的导航状态显示单元集成有带灯环的电源控制开关,灯环亮灭指示系统工作状态;所述的导航状态显示单元从rtk定位解算单元获取rtk定位信息、速度信息和航向信息,通过lcd1602液晶显示屏动态刷新显示rtk定位信息、速度信息和航向信息,通过一组三色led显示导航状态信息。
10.本发明的有益效果在于:
11.本发明克服了现有技术的缺陷,解决了传统rtk定位终端的低兼容性、低通用性、高成本、开发周期长等问题,进一步提升了rtk接收终端的配置灵活性以及系统集成度和兼容性,确保其精确连续、稳定可靠地完成rtk精密定位。本发明具有多模多频兼容能力、多gnss平台通用能力。
附图说明
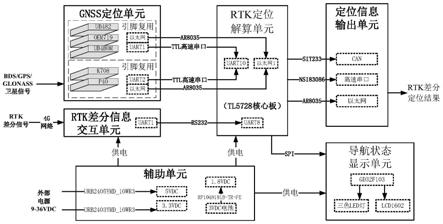
12.图1为一种多模多频rtk定位通用终端的示意图。
13.图2为本发明的实施例中第一次实验实测结果图。
14.图3为本发明的实施例中第二次实验实测结果图。
15.图4为本发明的实施例中第三次实验实测结果图。
16.图5为本发明的实施例中rtk设备测试实验定位精度统计表。
具体实施方式
17.下面结合附图对本发明做进一步描述。
18.本发明涉及一种多模多频rtk定位统用终端,属于高精度卫星导航定位技术领域。
19.本发明的目的是为了克服传统的rtk定位终端的低兼容性、低通用性、高成本、长开发周期等问题而提供了一种具有多模多频兼容能力、多gnss平台通用能力的多模多频rtk定位通用终端。
20.一种多模多频rtk定位通用终端,包含有gnss定位单元、rtk定位差分信息交互单元、rtk定位解算单元、定位信息输出单元、导航状态显示单元与辅助单元。
21.所述的gnss定位单元包括多模多频卫星天线和多平台gnss板卡;多模多频卫星天线用于接收多频多模卫星信号,并传输给多平台gnss板卡;在接收到多频多模卫星信号后,多平台gnss板卡实时解析获取gnss定位信息、速度信息和航向信息,并通过高速串口和以太网以冗余备份传输方式发送给rtk定位解算单元,完成rtk定位解算和状态显示。
22.所述的rtk定位差分信息交互单元通过4g网络获取来自于rtk基准站预先生成的rtk定位差分信息,然后将rtk定位差分信息通过高速串口rs232发送给rtk定位解算单元。
23.所述的rtk定位解算单元通过高速串口和以太网以冗余备份传输方式与gnss定位单元相连,通过gnss定位单元实时获取gnss定位信息;rtk定位解算单元通过高速串口和rtk定位差分信息交互单元相连,通过rtk定位差分信息交互单元获取rtk定位差分信息。基于gnss定位信息和rtk定位差分信息,rtk定位解算单元基于rtk定位算法完成rtk定位并生成rtk定位信息。rtk定位解算单元内置实时时钟电路,统一所采集信息的时间戳,然后将rtk定位信息以及来自于gnss定位单元的速度信息和航向信息统一打包发送给定位信息输出单元和导航状态显示单元。
24.所述的定位信息输出单元将rtk定位信息以标准通信形式实时向用户广播发送,通讯形式包括can通讯、高速串口rs422和以太网,通讯协议分别为nmea2000、nmea0183和自定义通讯协议;定位信息输出单元具有双向通讯能力,预留信息输入通道通过rtk定位解算单元调gnss定位单元和rtk定位差分信息交互单元的工作模式。
25.所述的导航状态显示单元从rtk定位解算单元获取rtk定位信息、速度信息和航向信息,通过lcd1602液晶显示屏动态刷新显示rtk定位信息、速度信息和航向信息,通过一组三色led显示导航状态信息。
26.所述的辅助单元为gnss定位单元、rtk定位差分信息交互单元、rtk定位解算单元、定位信息输出单元提供所需的稳定供电电压,并为rtk定位解算单元内置的实时时钟电路供电。
27.优选的:
28.gnss定位单元可以分时兼容多款多模多频gnss板卡,包括精密定位测向gnss板卡ub4b0m、oem719、k708、p40和ub482,基于多模多频卫星天线可以实时解析卫星信号并获取到导航定位信息。
29.所述的gnss定位单元解算出的导航定位信息具体包括gnss定位信息、速度信息、航向信息,按照nmea0183协议编码通过ttl高速串口以高波特率230400bps直接发送给rtk定位解算单元。
30.所述的rtk定位差分信息交互单元通过4g网络通讯模块实时获取差分信息,并通过高速串口以波特率230400bps按照rtcm3通讯协议实时发送至rtk定位解算单元。
31.所述的rtk定位解算单元采用tl5728核心板,其通过ttl高速串口(最高波特率为921600bps)与gnss定位单元、rtk定位差分信息交互单元以及定位信息输出单元通讯。其
中,tl5728核心板的uart10与gnss定位单元的串口(对应gnss板卡ub482、oem719、ub4b0m的uart1,k708、p40的uart2)通讯获取gnss定位信息,其波特率为460800bps;tl5728核心板的uart8与rtk定位差分信息交互单元的uart1通讯获取rtk定位差分信息,其波特率为230400bps;tl5728核心板的uart2与定位信息输出单元的uart3通讯输出rtk差分定位信息,其波特率可按照实际需求任意配置(最高波特率为921600bps)。
32.tl5728核心板内置了实时时钟电路,通过统一标准时间戳为rtk差分定位信息、速度信息、航向信息添加时间戳实现时间统一化管理。
33.所述的rtk定位解算单元采用tl5728核心板与gnss定位单元通讯时,引入以太网接口(通讯速率为10/100mbps)作为备用通信回路,与ttl高速串口工作于冗余热备份模式。
34.所述的rtk定位解算单元采用tl5728核心板通过uart10以波特率460800bps向gnss定位单元的uart2发送参数模型配置指令,调整gnss定位单元的工作模式。
35.所述的rtk定位解算单元的tl5728核心板搭载运行linux操作系统,预留调试串口(波特率为115200)和调试网口(通讯速率为100mbps),可实现系统调试以及内部程序在线升级。
36.所述的定位信息输出单元通过can通讯、高速串口rs422、以太网对用户广播rtk差分定位信息,其中,基于tl5728核心板的can控制器和can转换芯片sit233实现1路can总线接口,通讯速率为500kbps;基于tl5728核心板的高速串口控制器和rs422转换芯片nsi83086实现2路高速串口rs422,波特率可按照需求任意配置;基于tl5728核心板的以太网控制器eth0、eth1和以太网转换芯片ar8035实现2路以太网通讯,通讯速率为100mbps。
37.所述辅助单元包括供电电路和实时时钟电路,供电电路支持9
‑
36vdc输入,经由供电模块转换后输出5vdc、3.3vdc。其中,12vdc经由电压转换模块urb2405ymd_10wr3转换为5vdc,12vdc经由电压转换模块urb2403ymd_10wr3转换为3.3vdc分别为5vdc、3.3vdc等级供电。
38.所述辅助单元通过外置3v电池输入,经由电压转换模块rp104n181b
‑
tr
‑
fe转换为1.8vdc,为tl5728核心板的实时时钟电路供电,保证标准时间长时间有效。
39.导航信息状态显示单元通过spi通讯模式以通讯速率8mbps从rtk定位解算单元实时接收rtk差分定位信息、速度信息和航向信息,其集成的gd32f103控制一组三色led表征导航状态信息,并控制lcd1602滚动显示rtk差分定位信息、速度信息和航向信息。
40.导航信息状态显示单元的一组三色led,显示状态分别是:关闭、红色(稳定)、琥珀色(稳定)、绿色(稳定)。其中,三色led的关闭表示跟踪0颗卫星;三色led的红色(稳定)表示跟踪1至3颗卫星,三色led的琥珀色(稳定)表示跟踪4至5颗卫星;三色led的绿色(稳定)表示跟踪超过5颗卫星。
41.导航信息状态显示单元集成有带灯环的电源控制开关,灯环亮灭指示系统工作状态。
42.本发明克服了现有技术的缺陷,解决了传统rtk定位终端的低兼容性、低通用性、高成本、开发周期长等问题,进一步提升了rtk接收终端的配置灵活性以及系统集成度和兼容性,确保其精确连续、稳定可靠地完成rtk精密定位。
43.为了进一步说明多模多频rtk定位通用终端的精密性、通用性和稳定性,对多模多频rtk定位通用终端进行长时间定位性能考核测试。具体试验步骤如下:
44.(1)实验准备阶段:
45.①
实验所需器件:novatel gnss 750卫星天线(用于接收gnss信号)、基准站接收机、4g网络发送模块(用于发送差分定位信息)、移动站接收机、4g网络接收模块(用于发送差分定位信息)、usb转串口数据线(用于调试)、以太网连接线(用于调试)、220vac转12vdc电源转换模块(用于提供设备所需的12vdc)和pc机;
46.②
试验场地:某15层建筑的空旷楼顶(空旷的高层建筑楼顶可以降低周围建筑物对gnss导航信号的影响);
47.③
待验证实验设备:多模多频rtk通用终端(装载于移动站接收机内部,通过测试移动站接收机来检验多模多频rtk终端的性能)。
48.(2)搭建实验平台:
49.①
将novatel gnss 750卫星天线架设在空旷楼顶,卫星天线输出端接至移动站接收机、基准站接收机;
50.②
将4g网络发送模块与基准站电台相连接,并将基准站接收机与基站电台通过串口连接;
51.③
将4g网络接收模块与移动站电台连接,并将移动站电台通过串口与移动站接收机中的rtk差分信息交互单元相连;
52.④
将pc机通过usb转串口数据线与移动站接收机中多模多频rtk定位终端定位信息输出单元的高速串口相连,并将定位信息输出单元的以太网连接至pc机的以太网接口;
53.⑤
将220vac转12vdc电源转换模块的12vdc端连接至rtk定位通用终端的供电端。确认连线正确无误后,将电源转换模块的220vac端连接至市电,进行上电操作。
54.(3)实验阶段:
55.①
在pc机上通过串口(波特率为115200)远程登录多模多频rtk定位通用终端的操作系统,启动并配置基准站接收机和4g网络发送模块,启动并配置移动站接收机和4g网络接收模块;
56.②
novatel gnss 750卫星天线将接受到的导航信息通过功分器分别发送给移动站接收机和基准站接收机的gnss定位单元,gnss定位单元通过高速串口(波特率230400bps)和以太网以冗余备份传输方式按照rtcm3通讯协议发送给接收机内部的rtk定位解算单元;
57.③
基准站接收机解算得到差分定位信息后,将差分定位信息通过4g网络发送模块以4g网络的方式发送给移动站接收机的4g网络接收模块,4g网络接收模块获取的rtk定位差分信息传递给rtk定位差分信息交互单元;
58.④
rtk定位差分交互单元会将rtk差分定位通过高速串口rs232以波特率230400bps按照rtcm3通讯协议实时发送给rtk定位解算单元,在tl5728核心板中搭载的linux操作系统按照步骤
①
中配置好的方法运行rtk定位差分解算程序,对步骤
②
过程中收到的gnss定位信息与步骤
③
过程收到的rtk定位差分信息进行解算处理,从而得到rtk定位结果;
59.⑤
在移动站接收机中不保存原始观测量和定位结果,移动站接收机的定位信息输出单元将通过以太网把步骤
④
中得到的rtk定位差分信息传输给pc机,仅在pc机上保存移动站定位结果。
60.(4)实验结果及分析:
61.基于以上步骤,图3、图4、图5给出了3次测试考核实验的结果,图5给出了测试实验定位精度统计结果。
62.如图5所示,由定位结果图和误差统计结果,3次实验数据水平方向平均值均为零,水平方向和垂直方向rms均小于1cm,即水平方向rms都在3cm以内,垂直方向rms都在4cm,rtk设备满足定位设计指标要求。并且,3次实验的实际考核时长均在12h以上,多频多模rtk定位通用终端均能够保证精密连续、稳定可靠地稳定输出rtk差分定位结果,这表明多频多模rtk定位通用终端具有较好的兼容性和通用性。
63.实施例1:
64.如图1所示,本发明提供了一种多平台兼容rtk接收机,主要包括gnss定位单元、rtk定位差分信息交互单元、rtk定位解算单元、定位信息输出单元、导航状态显示单元和辅助单元,系统的工作原理图如图1所示。
65.(1)gnss定位单元
66.gnss定位单元主要由多模多频卫星天线和多平台gnss板卡两部分组成。如图1所示可知,多模多频卫星天线接收bds/gps/glonass卫星信号,用于接收多频多模卫星信号,并传输给多平台gnss板卡;在接收到多频多模卫星信号后,多平台gnss板卡实时解析获取gnss定位信息、速度信息和航向信息,并通过ttl高速串口和以太网以冗余备份传输方式发送给rtk定位解算单元,完成rtk定位解算和状态显示。
67.(2)rtk定位差分信息交互单元
68.rtk定位差分信息交互单元通过4g网络获取来自于rtk基准站预先生成的rtk定位差分信息,然后将rtk定位差分信息通过高速串口rs232以波特率230400bps按照rtcm3通讯协议实时发送给rtk定位解算单元。
69.(3)rtk定位解算单元
70.rtk定位解算单元采用tl5728核心板,通过ttl高速串口(最高波特率≥921600bps)和以太网(通讯速率10/100/1000m)以冗余备份传输方式与gnss定位单元、rtk定位差分信息交互单元以及定位信息输出单元通讯相连。其中,tl5728核心板的uart10与gnss定位单元的uart2通讯获取gnss定位信息,其波特率为460800bps;tl5728核心板的uart8与rtk定位差分信息交互单元的uart1通讯获取rtk定位差分信息,其波特率为460800bps;tl5728核心板的uart2与定位信息输出单元的uart3通讯输出rtk差分定位信息,其波特率为460800bps。
71.基于gnss定位信息和rtk定位差分信息,rtk定位解算单元基于rtk定位算法完成rtk定位并生成rtk定位信息。rtk定位解算单元内置实时时钟电路,统一所采集信息的时间戳,然后将rtk定位信息以及来自于gnss定位单元的速度信息和航向信息统一打包发送给定位信息输出单元和导航状态显示单元。
72.(4)定位信息输出单元
73.定位信息输出单元将rtk定位信息以标准通信形式实时向用户广播发送,通讯形式包括can通讯、高速串口rs422和以太网,通讯协议分别为nmea2000、nmea0183和自定义通讯协议;定位信息输出单元具有双向通讯能力,预留信息输入通道通过rtk定位解算单元调gnss定位单元和rtk定位差分信息交互单元的工作模式。其中,can通讯基于tl5728核心板
的can控制器和can转换芯片sit233实现,通讯速率为500kbps;高速串口rs422基于tl5728核心板的高速串口控制器和rs422转换芯片nsi83086实现,波特率为230400bps;以太网通讯基于tl5728核心板的以太网控制器和以太网转换芯片ar8035实现,通讯速率为100mbps。
74.(5)导航状态显示单元
75.导航状态显示单元通过spi通讯模式以通讯速率8mbps从rtk定位解算单元获取rtk定位信息、速度信息和航向信息,通过集成的gd32f103控制lcd1602液晶显示屏和一组三色led灯。其中,lcd1602液晶显示屏动态刷新显示rtk定位信息、速度信息和航向信息,三色led显示导航状态信息。此外,通过电源控制开关上灯环的亮灭指示系统工作状态
76.(5)辅助单元
77.辅助单元包括供电电路和实时时钟电路,辅助单元为gnss定位单元、rtk定位差分信息交互单元、rtk定位解算单元、定位信息输出单元提供所需的稳定供电电压,并为rtk定位解算单元内置的实时时钟电路供电。其中,供电电路支持9
‑
36vdc输入,经由供电模块转换后输出5vdc、3.3vdc,12vdc经由电压转换模块urb2405ymd_10wr3转换为5vdc,12vdc经由电压转换模块urb2403ymd_10wr3转换为3.3vdc分别为5vdc、3.3vdc等级供电。实时时钟电路包括外置3vdc电池和rp104n181b
‑
tr
‑
fe,3vdc电池输出的3vdc经由电压转换模块rp104n181b
‑
tr
‑
fe转换为1.8vdc。
78.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1