一种机动车轮胎深度检测系统及检测方法与流程
1.本发明属于检测领域,尤其是涉及一种机动车轮胎深度检测系统及检测方法。
背景技术:
2.随着机动车保有量的越来越多,机动车交通事故频发也成了一个严重的社会问题。汽车轮胎上胎纹深度的深浅对于行驶安全来说非常重要。轮胎花纹的深浅对轮胎存在以下方面的影响:
3.1.油耗,轮胎花纹越深,需要输出更多的能量来抵消轮胎造成的滚动阻力,油耗越高;轮胎花纹越浅,有利于省油,但抓地能力差,容易打滑,不利于汽车的安全行驶。
4.2.排水,车辆行驶在有水的路面或者雨雪的天气路面,轮胎的花纹会储水和排水,当轮胎花纹过浅时,轮胎出现水滑现象的概率会增加,很不安全;轮胎花纹较深时,可以增加摩擦力,排水能力提高,保证驾驶安全。
5.3.散热,在汽车的行驶过程中,轮胎会与地面剧烈摩擦,摩擦就会产生热量,在高速和长时间的行驶当中,轮胎会产生大量的热量,轮胎的花纹过深,轮胎本身无法进行及时的散热,造成轮胎老化加速,大大缩短轮胎的寿命,严重的话还会导致轮胎爆胎、撕裂等现象,影响驾乘人员的生命安全。轮胎需要良好的散热性能,花纹不宜过深。
6.4.操控性,轮胎的花纹越深轮胎的操控性能会越好,但是制动性能会变差。
7.可见,轮胎花纹深度与行车安全密不可分,对各种机动车轮胎花纹深度国家标准规定是这样的:轿车用的子午线轮胎花纹磨损极限为1.6mm,货车、客车用的子午线轮胎花纹磨损极限为2.0mm。轮胎花纹深度按以下标准检查:良好:大于3.5mm,建议下次更换:2.5~3.5mm;需要更换:小于2.5mm,更换极限值:1.6mm;如果轮胎老化、龟裂严重,也应该提前更换。
8.为了保证行车安全,行管部门对年检车辆,要求对机动车的轮胎花纹深度进行检查,来确认轮胎的使用磨损情况,确保机动车的道路上的安全。目前都是采用人工进行的,通过花纹深度尺,来完成轮胎花纹深度的测量,检查轮胎的使用磨损情况。人工检查,存在很多人为因素,检测的数据不确定性增加,给机动车的安全行驶带来隐患。
技术实现要素:
9.为了解决现有技术所存在的技术问题,本发明在此的目的在于提供一种机动车轮胎深度检测系统,该系统至少可以实现自动获取待检测车胎胎纹数据,一定程度上解决因人工检查过程中由于人为因素而导致检测数据不准确的问题。
10.为实现本发明的目的,在此提供的机动车轮胎深度检测系统包括:
11.检测台架,包括用于支撑待检测车胎的支撑组件;
12.传感器组件,包括用于获取待检测车胎胎面距参考面的距离和胎痕距参考面的距离的测距传感器和用于感应待检测车胎置于所述支撑组件上的感应器;以及
13.控制终端,与所述测距传感器和所述感应器信号连接,所述控制终端运行检测系
统,所述感应器输出的感应信号经所述控制终端接入所述检测系统,所述检测系统根据接入的感应信号输出控制指令经所述控制终端加载于所述测距传感器,所述测距传感器开始获取待检测车胎胎面距参考面的距离和胎痕距参考面的距离,并将获取的距离数据经所述控制终端接入所述检测系统,所述检测系统对距离数据进行分析处理,得到胎痕深度。
14.本发明提供的检测系统结合了检测台架、传感器组件和控制终端,控制终端上运行有检测系统,测距传感器获取距离数据,最终通过检测系统实现数据的处理实现胎痕深度检测,一定程度上解决了因人工检查过程中由于人为因素而导致检测数据不准确的问题,保证了数据的准确性;且通过传感器组件感应待检测车胎是否置于检测台架上,再启动测距传感器获取距离数据,实现了智能闭环控制。
15.在一些实施方式中,所述检测台架上还包括支架,所述测距传感器通过滑块安装于所述支架上;所述滑块在第一驱动机构的驱动下带动所述测距传感器移动,所述第一驱动机构与所述控制终端信号连接,所述检测系统在所述感应器感应到待检测车胎置于支撑组件上时经所述控制终端加载控制指令控制所述第一驱动机构动作。
16.本发明技术方案第一驱动机构的设置,在检测系统的控制下实现了测距传感器的位置移动,可以根据待检测车胎放置位置移动,提高了自动化,且解决了测距传感器固定而导致车胎必须置于固定位置才能实现检测的问题。
17.在一些实施方式中,所述传感器组件还包括限位装置,所述限位装置与所述控制终端信号连接;所述限位装置用于感应所述滑块位置,并在所述滑块滑至所述限位装置处时输出信号经所述控制终端接入所述检测系统,所述检测系统输出控制指令控制所述第一驱动机构动作。
18.本发明技术方案限位装置的设置,对滑块滑动范围进行了限位,确保了测距传感器在指定范围内。
19.在一些实施方式中,本发明提供的检测系统还包括与所述控制终端信号连接的第二驱动机构,所述检测系统经所述控制终端加载控制指令控制所述第二驱动机构动作;所述第二驱动机构带动所述支撑组件转动,以改变待检测车胎距离获取面。
20.本发明技术方案第二驱动机构的设置,实现了支撑组件的转动,从而使放置于其上的待检测轮胎转动,改变与测距传感器的相对面,获取不同面的胎面距参考面的距离和胎痕距参考面的距离。
21.在一些实施方式中,本发明提供的检测系统还包括用于锁止所述支撑组件的锁止装置,所述锁止装置包括锁止板和用于驱动所述锁止板与所述支撑组件紧密贴合的第三驱动机构。
22.在一些实施方式中,本发明提供的检测系统还包括用于控制所述第三驱动机构动作的控制系统。
23.在一些实施方式中,所述控制系统受所述检测系统的控制输出控制指令控制所述第三驱动机构动作。
24.本发明在此的另一个目的在于提供一种种机动车轮胎深度检测方法,其特征在于,该方法包括以下步骤:
25.步骤s1:将待检测车胎置于支撑组件上,感应器感应到待检测车胎置于支撑组件上后输出感应信号经控制终端接入检测系统;
26.步骤s2:所述检测系统根据接入的感应信号输出控制指令经控制终端加载于测距传感器,所述测距传感器开始获取待检测车胎胎面距参考面的距离和胎痕距参考面的距离,并将获取的距离数据经所述控制终端接入所述检测系统;
27.步骤s3:所述检测系统进行以下处理方式之一:
28.处理方式一:
29.步骤sa31:所述测距传感器输出的包括胎面距参考面的距离和胎痕距参考面的距离的检测数据,作为检测数据组;
30.步骤sa32:选取检测数据组中间区域数据,通过查找算法获取该中间区域数据中的最大数据和最小数据;
31.步骤sa33:将所述步骤sa31获取的检测数据组中的数据分别与所述最大数据和所述最小数据进行比对,接近所述最大数据的数据记录为胎痕距参考面的距离l1,接近所述最小数据的数据记录为胎面距参考面的距离l2;
32.步骤sa34:取相邻距离l1和距离l2作差处理,差值即为胎痕深度;
33.处理方式二:
34.步骤sb31:获取待检测车胎的胎痕距参考面的有效距离l1'和胎面距参考面的有效距离l2';
35.步骤sb32:取相邻有效距离l1'和有效距离l2'作差处理,差值即为胎痕深度;
36.所述有效距离l1'的获取步骤为:从所述测距传感器获取的距离数据中获取连续相邻的一组待检测车胎胎痕距参考面的距离,形成胎痕检测数据组,该数据组中元素记作胎痕获取距离,用胎痕参考数据与胎痕检测数据组中所有胎痕获取距离分别进行比对,如所有胎痕获取距离均为胎痕参考数据的70%到130%内,则计算所有胎痕获取距离平均值作为有效距离l1',反之则剔除该组数据,重新获取;
37.所述有效距离l2'的获取步骤为:从所述测距传感器获取的距离数据中获取连续相邻的一组待检测车胎胎面距参考面的距离,形成胎面检测数据组,该数据组中元素记作胎面获取距离,用胎面参考数据与胎面检测数据组中所有胎面获取距离分别进行比对,如所有胎面获取距离均为胎面参考数据的70%到130%内,则计算所有胎面获取距离平均值作为有效距离l2',反之则剔除该组数据,重新获取。
38.在一些实施方式中,在步骤s2中,所述检测系统根据接入的感应信号输出控制指令经控制终端加载于第一驱动机构和测距传感器,所述第一驱动机构输出驱动信号驱动滑块在支架上往返滑动,使所述测距传感器先感应待检测车胎所处位置及数量,感应结果输入检测系统;确定待检测车胎所处位置及数量后,检测系统输出控制指令使所述测距传感器开始获取待检测车胎胎面距参考面的距离和胎痕距参考面的距离。
39.采用本发明技术方案,至少达到的有益效果包括:
40.1)本发明提供的检测系统实现了胎纹深度检测自动检测,一定程度上解决了因人工检查过程中由于人为因素而导致检测数据不准确的问题,保证了数据的准确性。
41.2)本发明提供的检测方法实现了精准检测,检测结果更精确,且整个检测方法操作简单,可用于任何场所对任何机动车车胎胎纹深度检测。
附图说明
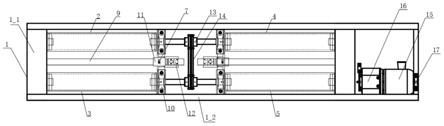
42.图1为本发明提供的检测系统中检测台架、传感器组件和驱动机构的位置结构示意图之一;
43.图2为图1的透视图;
44.图3为本发明提供的检测系统中检测台架、传感器组件和驱动机构的位置结构示意图之二;
45.图4为图3结构的透视图;
46.图5为本发明提供的锁止机构的原理图;
47.图6为本发明包括传感器保护罩的结构示意图;
48.图7为本发明提供的传感器保护罩的结构示意图;
49.图8为本文实施例提供的检测方法一的流程示意图;
50.图9为本文实施例提供的检测方法二的流程示意图;
51.图10为本发明提供的检测方法的检测原理图一;
52.图11为本发明提供的检测方法的检测原理图二;
53.附图中:1
‑
台架,1_1
‑
边盖板,1_2
‑
中盖板,1_3
‑
刹车架,1_4
‑
伺服电机支架,1_5
‑
传感器支架,2
‑
滚筒a,3
‑
滚筒b,4
‑
滚筒a’,5
‑
滚筒b’,6
‑
感应器,7
‑
测距传感器,8
‑
限位装置,9
‑
支架,10
‑
球形轴承,11
‑
滑块,12
‑
第一驱动机构,13
‑
联轴器,14
‑
链条,15
‑
电机,16
‑
减速机,17
‑
电机球面轴承,18
‑
锁止板,19
‑
第一隔层,20
‑
第二隔层,21
‑
转轴,22
‑
气囊,23
‑
气泵,24
‑
电磁阀,25
‑
气压表,26
‑
刹车片,27
‑
传感器保护罩。
具体实施方式
54.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得发明将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。
55.本文提供的检测系统包括检测台架包括检测台架、传感器组件、驱动机构、控制终端,在此结合附图对各功能部分在此进行示例性说明。
56.参照图1
‑
图7所示,本文提供的检测台架示例性结构包括:
57.台架1,用于支撑功能部件,包括边盖板1_1、中盖板1_2、刹车架1_3、伺服电机支架1_4和传感器支架1_5。
58.支撑组件,用于支撑待检测车胎,该支撑组件可以是任何一种结构,如矩形柱、板结构、或其它柱体;在此采用的滚筒结构,参照图1
‑
图5,包括通过包括底座的球形轴承10安装于台架1内的第一滚筒和第二滚筒;具体的,第一滚筒包括滚筒a2和滚筒a’4,第二滚筒包括滚筒b3和滚筒b’5,第一滚筒和第二滚筒相对设置,以保证能够支撑待检测车胎。
59.传感器组件,包括用于感应待检测车胎置于支撑组件上的感应器6、用于获取待检测车胎胎面距参考面的距离和胎痕距参考面的距离的测距传感器7、限位装置8;感应器6安葬于边盖板1_1上,限位装置安装于传感器支架1_5上。
60.其中感应器6在此可以采用光敏传感器,当待检测车胎置于支撑组件上形成遮挡,光线发现变化,光敏传感器感应此时的光线变化输出信号至控制终端,以提示待检测车胎已置于支撑组件上;当待检测车胎离开支撑组件后,光敏传感器感应此时光线变化输出信
号至控制终端,以提示待检测车胎已离开支撑组件。感应器可以是压力传感器,安装于支撑组件上,当待检测车胎置于支撑组件上时压力传感器输出信号至控制终端,以提示待检测车胎已置于支撑组件上;当待检测车胎离开支撑组件后,压力传感器输出此时压力数据至控制终端,以提示待检测车胎已离开支撑组件。当然也可以光敏传感器和压力传感器同时安装,以达到补偿作用,或者采用其它感应器。
61.测距传感器7可以采用任何一种能够实现测距的传感器,如激光测距传感器。其通过支架9安装于台架1上,与支撑组件相对,保证待检测车胎置于支撑组件上时能获取其胎面/胎痕距参考面的距离。
62.驱动机构,包括第一驱动机构12和用于驱动支撑组件转动的第二驱动机构,第一驱动机构、第二驱动机构受控制终端控制。第一驱动机构12安装于伺服电机支架1_4上,测距传感器7通过滑块11安装于支架9上,第一驱动机构12驱动滑块11带动测距传感器7在支架9上移动,以保证距离数据有效获取。在此,支架9可以是丝杆或皮带,在第一驱动机构12的驱动下运作,带动滑块11移动;第一驱动机构12可以是伺服电机,当然也可以是其它。
63.第二驱动机构驱动支撑组件转动,用于对放置于支撑组件上的待检测车胎进行转动,实现不同面的数据采集。结合本文提供的支撑组件结构,为保证在转动过程滚筒a2和滚筒a’4,滚筒b3和滚筒b’5分别能够同步转动,在此滚筒a2和滚筒a’4之间以及滚筒b3和滚筒b’5之间分别通过联轴器13连接;在联轴器13之间安装有链条14。当然,也可以是不通过联轴器13连接,分别通过独立的驱动机构驱动,驱动机构输出同步也可实现同轴转动。在此,第二驱动机构可以是电机15,也可以是电机15和减速机16,减速机16将速比控制在一定范围内,如每小时5公里左右;电机15通过电机球面轴承17安装,其输出轴与支撑组件连接,动作时带动支撑组件转动。
64.限位装置8位于支架9的旁侧,当第一驱动机构12驱动滑块11滑至限位装置8处时,限位装置8输出信号至控制终端,控制终端根据该信号输出控制指令控制第一驱动机构12反向转动,使滑块11往返滑动。该限位装置8可以是光敏传感器、限位开关、雷达或者其它能感应物体的传感器。
65.控制终端,与传感器组件和驱动机构信号连接,并运行检测系统,检测系统用于处理传感器组件输出的信号,并根据信号输出控制指令控制驱动机构运作,并计算得到待检测车胎胎痕深度,形成自动化检测。
66.在此对本文提供的检测系统工作过程进行详细描述:首先将待检测车胎置于作为支撑组件的第一滚筒和第二滚筒上,感应器此时感应到光线或/和压力变化,输出信号作为触发信号至控制终端接入检测系统,检测系统接收到该触发信号输出控制指令经控制终端加载于测距传感器,使测距传感器启动开始获取待检测车胎胎面距参考面距离和胎痕距参考面距离,并将获取的距离数据回传至控制终端,经控制终端接入检测系统,检测系统对距离数据进行处理,计算得到胎痕深度;检测完成后,待检测车胎离开支撑组件即可。
67.当感应器输出触发信号时,检测系统还输出控制指令控制第一驱动机构运作,第一驱动机构驱动滑块移动,使测距传感器先检测待检测车胎具体位置以及数量,并将检测到的数据回传至检测系统,当确定待检测车胎具体位置及数量后,检测系统输出控制指令控制第一驱动机构使其将测距传感器滑动至待检测车胎下方,开始获取待检测车胎胎面距参考面距离和胎痕距参考面距离,并将获取的距离数据回传至控制终端,经控制终端接入
检测系统,检测系统对距离数据进行处理,计算得到胎痕深度;检测完成后,待检测车胎离开支撑组件即可。距离数据获取过程中,检测系统可以持续输出控制指令时第一驱动机构运作带动测距传感器滑动以获取不同点的距离数据,形成连续距离数据为同一面(胎面、胎痕)的距离数据;当然也可以是在获取胎面某一点距参考面的距离后将测距传感器移至胎痕处,获取胎痕某一点距参考面的距离。测距传感器获取距离数据过程中持续将距离数据回传至检测系统,当回传的距离数据满足要求时,检测系统输出控制指令控制测距传感器停止数据获取,同时控制第一驱动机构停止运作。
68.距离数据获取过程中,检测系统可以发出控制指令控制第二驱动机构运作,使支撑组件转动,从而改变待检测车胎与测距传感器的相对面,获取不同面的胎面距参考面的距离和胎痕距参考面的距离。
69.在测距传感器往返确定待检测车胎所处位置及数量过程中,通过限位装置实现限位,当测距传感器滑动至限位装置处时,限位装置感应并输出感应信号至检测系统,检测系统输出控制指令控制第一驱动机构动作使测距传感器往返滑动,避免了测距传感器滑出支架而摔落的情况。
70.本文提供的检测还包括用于锁止支撑组件的锁止机构,锁止机构包括锁止板18、用于驱动锁止板18锁制支撑组件的第三驱动机构和用于控制第三驱动机构驱动锁止板18动作的控制系统。该锁制机构可以用于锁制任何结构的支撑组件,在此以支撑组件为滚筒结构为例详细说明其结构及原理,但本领域技术人员应该理解的是,以滚筒为例仅是示例性说明,并非对本技术保护范围的限制性说明。
71.结合滚筒结构作为支撑组件,结合图3
‑
图4所示,锁止板18的底面与第三驱动机构接触,另一面用于与滚筒表面紧密贴合。锁止板18与第三驱动机构之间布设有隔层19,第三驱动机构安装于刹车架1_3上,第三驱动机构和刹车架之间布设有隔层20;锁止板18通过转轴21固定于台架1的侧壁上。
72.锁止板18使用时位于滚筒(第一滚筒、第二滚筒)旁侧,并在不锁止状态下与滚筒(第一滚筒、第二滚筒)之间存在间隙,在需锁止状态时,控制系统控制第三驱动机构动作使锁止板18紧密贴合滚筒(第一滚筒、第二滚筒),增加两者之间的摩擦阻力,达到锁止滚筒(第一滚筒、第二滚筒)的目的。
73.本文锁止装置中的驱动机构可以采用任何一种能够驱动锁止板18向滚筒(第一滚筒、第二滚筒)方向移动并使锁止板18和滚筒(第一滚筒、第二滚筒)紧密贴合,并能使锁止板18和滚筒(第一滚筒、第二滚筒)分开的结构;本实施方式提供了以下两种结构:
74.1、第三驱动机构包括气囊22,控制系统包括气泵23和电磁阀24,如图5所示,气泵23产生的气压经管道和电磁阀24从气囊22的进气孔通入气囊22驱动锁止板18锁制滚筒,实现锁制;解锁制时,气囊22内的气压从气囊22的排气孔经管道和电磁阀24排出,实现解锁制。
75.为了加速排气,还可以包括快排阀,该快排阀可以位于气囊上,也可以通过管道与气囊的排气孔连通;需要快速排气时,可开启排气阀。
76.2、第三驱动机构包括电机和丝杆,丝杆的一端安装于电机的输出端,另一端安装于锁止板18的底端面上;控制系统输出控制信号控制电机工作,驱动丝杆转动带动锁止板18动作锁制滚筒。此结构中的控制系统可以是由单片机构成的最小系统,单片机中存储有
经编辑并调试成功的在上电后能够运行的计算机程序,实现控制电机的正反转,实现锁制和解锁制。单片机上电后运行存储于其内的计算机程序输出控制信号使电机运作带动丝杆运动实现锁止板18紧密贴合滚筒的目的,实现锁制;待距离数据获取完成后,输出控制信号使电机运作带动丝杆运动实现锁止板18与滚筒分离的目的,实现解锁制。单片机输出控制信号可以通过设置外部控制开关实现,通过按下不同的控制开关实现不同控制信号的输出,以达到锁制和解锁制目的;当然,单片机输出控制信号也可以通过外部其它设备控制,该外部设备与单片机之间通过总线连接,用于数据传递,实现控制单片机控制信号的输出,以实现锁制、解锁制目的。
77.为了实现导入气泵23的气体量可调节的目的,本实施方式在此还包括用于调节导入气泵23气体量的调节阀,该调节阀位于连通气源和气泵23之间的管道上。
78.本实施方式在此还包括用于显示气泵23内气压大小的气压表25,有利于观察气泵23内的气压情况,避免因气压过大而导致安全问题的情况。
79.为增加锁止板18与滚筒(第一滚筒、第二滚筒)之间的摩擦阻抗力,在锁止板18与滚筒(第一滚筒、第二滚筒)紧密贴合面上安装有刹车片26。
80.将本文提供的锁止装置安装于台架1内,安装位置可以是位于滚筒的下方或侧方,以保证在驱动机构运作时锁止板18能够紧密贴合滚筒表面即可;轮胎胎纹检测过程中,先启动锁制装置将滚筒进行锁制,便于待检测车辆开上滚筒使轮胎位于滚筒上;胎纹数据采集过程中,锁制装置可以处于锁制状态,也可以处于解锁制状态,当胎纹数据采集结束后,锁制装置处于锁制状态,便于待检测车辆开离滚筒。
81.在将本文提供的锁制装置安装于底座1内时,安装方式可以是以下之一:
82.1、当驱动机构为气囊时,通过转轴将锁止板18安装于台架1上并使锁止板18位于滚筒下方或侧方;当气囊充气,气囊体积膨胀,驱动锁止板绕以转轴21为中心向上转动,迫使锁止板18(刹车皮)与滚筒紧密结合,形成较大摩擦力,以锁止滚筒;当电磁阀处于排气状态时,气囊中的高压气体由电磁阀和排气阀排出,气囊体积缩小,靠锁止板18自身的重力压下气囊,迫使锁止板18以转轴21为中心向下转动,锁止板18(刹车皮)与滚筒分离,以释放滚筒。
83.当驱动机构为电机和丝杆时,电机通过电机安装支架安装于台架1上,丝杆的一端连接于电机的输出轴上,另一端连接于锁止板18上,丝杆为竖直安装使锁止板18位于滚筒下方或侧方。
84.为了保护测距传感器7,本文提供的装置还包括传感器保护罩27,该保护罩安装于台架1上并盖合于支架上保护测距传感器7,结合图6、图7所示。
85.本文检测系统由计算机程序编辑开发形成,其计算机程序运行状态下实现本文提供的控制作用,对接入的距离数据进行以下检测方法过程。
86.检测方法一
87.图8示出了本实施例提供的检测方法示例性的流程,其包括以下步骤:
88.步骤sa1:通过作为获取终端的激光传感器或测量尺或其它终端获取待检测车胎的一组包括胎面距参考面的距离和胎痕距参考面的距离的检测数据,作为检测数据组;如图10所示,从s点至t点,构成检测数据组,不同填充表示胎面数据和胎痕数据;
89.步骤sa2:选取步骤s1获取的检测数据组中间区域数据,中间区域数据的选取可以
根据需要任意选取,如选择s点到t点的中间点d,分别选择d点两侧相等的点数作为a点和b点,ab即为选中的中间区域,如图10所示;通过查找算法获取该中间区域数据中的最大数据和最小数据,作为数据参考,其中最大数据为胎痕数据,最小数据为胎面数据;
90.步骤sa3:将所述步骤sa1获取的检测数据组中的数据分别与最大数据和最小数据进行比对,接近最大数据的数据记录为胎痕距参考面的距离l1,接近最小数据的数据记录为胎面距参考面的距离l2;由于步骤s1获取检测数据过程中存在获取的相邻数据为同一个面,即同为胎面数据,或同为胎痕数据,因此在检测数组中连续相近似数据的为一个面的数据,即为胎面数据,或胎痕数据;
91.步骤sa4:相邻距离l1和距离l2之间距离差,差值即为胎痕深度。
92.在进行上述步骤过程中,将步骤sa1获取的检测数据组中的数据分别与最大数据和最小数据进行比对过程中,检测数据组中连续几个数据均与最大数据或最小数据接近,则取该连续几个数据的平均值作为距离l1或距离l2;提高了检测准确性。
93.本实施例提供的检测方法还包括用于剔除检测数据组中的无效杂乱数据的数据剔除步骤,该步骤设定胎面参考数据和胎痕参考数据,并将胎面参考数据、胎痕参考数据与检测数据组中的数据进行比对,如检测数据组中的数据为胎面参考数据、胎痕参考数据的70%到130%内则为有效数据,反之则为无效杂乱数据,予以剔除。
94.检测方法二
95.图9示出了本实施例提供的检测方法示例性的流程,包括以下步骤:
96.步骤sb1:获取待检测车胎的胎痕距参考面的有效距离l1'和胎面距参考面的有效距离l2';
97.步骤sb2:取相邻有效距离l1'和有效距离l2'作差处理,差值即为胎痕深度。
98.其中,有效距离l1'的获取步骤为:获取一组待检测车胎胎痕距参考面的距离,形成胎痕检测数据组,该数据组中元素记作胎痕获取距离,用胎痕参考数据与胎痕检测数据组中所有胎痕获取距离分别进行比对,如所有胎痕获取距离均为胎痕参考数据的70%到130%内,则计算所有胎痕获取距离平均值作为有效距离l1',反之则剔除该组数据,重新获取。
99.有效距离l2'的获取步骤为:获取一组待检测车胎胎面距参考面的距离,形成胎面检测数据组,该数据组中元素记作胎面获取距离,用胎面参考数据与胎面检测数据组中所有胎面获取距离分别进行比对,如所有胎面获取距离均为胎面参考数据的70%到130%内,则计算所有胎面获取距离平均值作为有效距离l2',反之则剔除该组数据,重新获取。
100.本实施例提供的检测方法通过有效数据计算得到胎痕深度,结果精准。
101.本实施例中,该检测方法还包括判断胎痕检测数据组长度和胎面检测数据组长度是否超过一定的测量宽度,如超过则计算所有胎痕获取距离平均值作为有效距离l1'和所有胎面获取距离平均值作为有效距离l2',反之则剔除该组数据,重新获取。
102.此处所记载的胎痕检测数据组和胎面检测数据组分别为数组,其长度即数组元素的个数,即判断数组中的元素个数是否超过一定的测量宽度;该测量宽度满足的约束关系为:测量宽度=检测数据数量*单位步长。
103.本文提供的检测方法的原理是基于获取终端(激光传感器)输出的ad数据与距离数据的线性关系,数据处理终端(计算机、服务器)通过比例系数对ad数据进行处理,计算出
与ad对应的距离数据。通过计算将获取终端获取所有的ad数据计算成为距离数据,也就是激光传感器到检测物的距离,得到检测数据组;计算相邻距离l1(有效距离l1')和距离l2(有效距离l2')之间距离差,差值即为胎痕深度。如图11所示,a与b、a与c、a与d差值就是深度数据。
104.如图11所示,将各距离l1值(有效距离l1'值)和距离l2值(有效距离l2'值)绘制成曲线,如a、b、c、d构成的曲线,获取终端从被检测车胎的一侧开始获取数据至车胎另一侧止时,通过绘制的曲线可以直观得出被检测轮胎有几条胎痕;绘制的曲线可以通过显示终端显示,该显示终端可以是独立于数据处理终端,也可以是集成于数据处理终端。当然,也可以是计算一个相邻距离l1(有效距离l1'值)和距离l2(有效距离l2'值)之间距离差时,进行计数,初始的记为1,依次累加,待所有距离差计算完后,即可得到待检测车胎的胎痕数。
105.本文所记载的参考面可以是获取终端所处的平面,当然也可以根据使用情况确定其它平面作为参考面。
106.本文所记载的胎面是指轮胎上直接与路面接触的部分,胎痕是指轮胎凹进去的部分。
107.本公开已由上述相关实施例加以描述,然而上述实施例仅为实施本公开的范例。必需指出的是,已揭露的实施例并未限制本公开的范围。相反,在不脱离本公开的精神和范围内所作的变动与润饰,均属本公开的专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1