一种基于时域相位匹配的空间高速自旋目标ISAR三维成像方法
一种基于时域相位匹配的空间高速自旋目标isar三维成像方法
技术领域
1.本发明属于雷达领域;具体涉及一种基于时域相位匹配的空间高速自旋目标isar三维成像方法。
背景技术:
2.从现有的空间高速自旋目标三维isar成像方法来看,大多数是基于参数搜索的方法。而高速自旋目标的成像需要得到三个未知的参数,分别为散射点所在旋转平面的高度,旋转半径,初始相位。
3.现有技术中使用切片法在不同的高度设计匹配滤波器组。该方法是一种基于参数遍历的算法,该算法不足之处是计算量消耗大计算时间长,对实时性需求的isar成像影响很大。
4.现有技术中使用三维参数遍历过程沿回波的正弦包络进行积分,该方法计算量同样较大,对实时性需求的isar成像影响很大。
5.现有技术中利用pso的方法对正弦包络的参数进行快速参数搜索,利用clean技术消除已提取分量。这个方法在回波混叠情况下,clean技术的使用会大大影响成像的准确程度。低信噪比同样会影响成像的准确程度。
技术实现要素:
6.本发明提供一种基于时域相位匹配的空间高速自旋目标isar三维成像方法,用以解决现有参数估计方法大都存在计算量过大、对先验知识要求过高(如:相位、高度等信息)、快速搜索方法复杂环境适应性不足等缺点。
7.本发明通过以下技术方案实现:
8.一种基于时域相位匹配的空间高速自旋目标isar三维成像方法,其特征在于,所述三维成像方法包括以下步骤:
9.步骤1:处理雷达回波数据;对线性调频信号的雷达回波对其进行平动补偿,并且估计角速度;
10.步骤2:利用步骤1的雷达回波数据构造与之相对应的时域耦合项并进行共轭相乘;
11.步骤3:利用步骤2不同匹配参数的处理时域耦合项后的结果,进行参数提取与坐标重构最终得到isar图像。
12.进一步的,所述步骤1处理雷达回波数据具体为:首先对线性调频信号的雷达回波进行去斜率处理,再对其进行平动补偿,最后估计旋转角速度。
13.进一步的,所述步骤1具体为,当目标的旋转速度远小于雷达的脉冲重复频率prf,通过补偿残余视频相位、回波包络斜置项后,距离慢时间雷达回波通过脉冲压缩方法使数据变换到距离慢时间域表示为(1)式s1(r,t
m
);其中t
p
,γ,λ指脉冲宽度、线性调频率、波长;
t
m
是慢时间,r是快时间变换后的距离向;n为目标上散射点的个数;
[0014][0015]
其中r
i
(t
m
)由目标旋转引起的,它反映了散射点的微动状态;
[0016]
在高速自旋目标isar成像过程中,假设旋转轴矢量与雷达视线之间的角度α在观测时间内恒定;因此式(1)中r
i
(t
m
)写为
[0017]
r
ir
(t
m
)=z
i cosα+ρ
i sinαsin(θ
i
+ωt
m
)
ꢀꢀꢀ
(2)
[0018]
对距离慢时间域的信号(1)进行0.2*max的全局阈值操作,再对其距离向逆傅里叶变换ifft到快时间慢时间域得到
[0019][0020]
式(3)第二个相位项为快时间与慢时间的耦合项;如果完全匹配耦合项消除一个散射点的第二项相位,再对其做方位压缩,第一个相位项会使回波在距离慢时间域距离门内有一条包络不变的分量。
[0021]
进一步的,所述步骤2具体包括以下步骤:
[0022]
步骤2.1:在距离慢时间内构造一条沿慢时间呈正弦包络的信号;
[0023]
步骤2.2:利用步骤2.1的正弦信号沿距离向进行逆傅里叶变换,变换到快时间慢时间域;
[0024]
步骤2.3:再对雷达回波信号与参考信号的时域相位进行共轭相乘;
[0025]
步骤2.4:当构造的正弦参数与回波中的一条正弦包络的幅值和初始相位相同时,耦合相位项得到抑制,相位匹配;
[0026]
步骤2.5:再对处理后的信号做距离向傅里叶变换,会得到一条包络不变的分量,即原来雷达回波中的一条沿慢时间呈正弦包络的回波分量变成一条包络不变的回波分量。
[0027]
进一步的,所述步骤2具体包括以下步骤:
[0028][0029]
其中,s
mf
(r,t
m
)为;在距离慢时间域构造的一条正弦包络信号;
[0030]
构造z0=0的正弦,即在距离慢时间平面内正弦位于距离门的中心;
[0031]
式(4)进行距离向ifft可得到所需要构造的快时间慢时间耦合项:
[0032][0033]
其中,为时域的散射点回波数据,为参考信号在时域的共轭表达形式,j为虚数单位,a
i
为目标的后向散射系数,为快时间,为旋转平面的投影高度,z0为参数匹配的高度,
[0034]
式(3)与式(5)共轭相乘结果为,此步即为时域相位匹配:
[0035][0036]
进一步的,所述步骤3的参数提取具体包括以下步骤:
[0037]
步骤c3.1:遍历不同的旋转半径、初始相位来构造时域耦合项;
[0038]
步骤c3.2:基于步骤c3.1的时域耦合项与时域回波进行共轭相乘,处理后的回波求和的结果,进行峰值参数提取。
[0039]
进一步的,所述步骤3的坐标重构具体包括以下步骤:
[0040]
步骤z3.1:时域耦合项共轭相乘后,进行方位向傅里叶变换,
[0041]
步骤z3.2:再然后沿慢时间累加每个距离门内回波;
[0042]
步骤z3.3:基于步骤3.1与3.2得到一个三维矩阵,即每个距离门r对应一个二维参数遍历的平面。
[0043]
进一步的,所述步骤3具体为,当存在一组参数有时,对式(6)进行距离压缩可得:
[0044][0045]
式(7)表示当匹配的参数半径与相位与回波中一条正弦包络的参数完全相同时,进行距离压缩可得一条位于r=z
i
‑
z0的包络不变分量;其中,s
u
(r,ρ0,θ0,t
m
)为时域共轭相乘处理后进行距离压缩得到的回波,t
p
为脉冲重复周期,z
i
为第i个散射点的投影高度,z0为参数匹配的高度,为第j个散射点的投影旋转半径,ρ0为参数匹配的旋转半径,θ
j
为第j个散射点的初始相位,θ0为参数匹配的相位,ω为目标的旋转角速度,t
m
为慢时间;
[0046]
因此对回波进行二维参数匹配,每一组参数可以得到一个匹配后的s
u
(r,ρ0,θ0,t
m
) 累加式(7)中回波所在的每个距离门内的回波幅值,作为匹配的参考值;
[0047][0048]
经过二维的遍历参数,通过上述公式(4
‑
8)计算,每个距离门都对应一个匹配的峰值平面。
[0049]
进一步的,所述步骤3具体为,由ifft的特点可知,对fitness的值乘上距离门的数量m后,包络不变像素点的总个数,其中fitness数值大小代表在距离门内;对于每个距离门fitness中最大的值max(s
fitness
(r,ρ
extract
,θ
extract
)),选择一个阈值门限0.8*方位门数来判断s
fitness
(r,ρ0,θ0)上是否有散射点;
[0050]
对阈值操作后的s
fitness
(r,ρ0,θ0)平面上进行峰值提取,提取散射点的选择半径与相位信息;高度信息即为距离门的大小r;其中c为光速,b为线性调频信号的带宽;
[0051][0052][0053]
θ
real
=θ
extract
ꢀꢀꢀ
(11)
[0054]
其中,z
real
为匹配到的散射点高度,ρ
real
为匹配到的散射点旋转半径,θ
real
为匹配到的散射点真实相位。
[0055]
本发明的有益效果是:
[0056]
本发明直接处理时域中的耦合项,通过一次二维参数遍历即可完成包含所有半径、相位相同散射点的匹配。高度信息通过匹配程度超过门限的距离门来判断。对于空间碎片都可成像,在低信噪比、稀疏情况下可以实现高分辨成像。
[0057]
本发明利用了匹配的思想二维参数匹配即可完成三维参数的确定,因此成像准确度较高效率较高;相较于传统三维参数遍历的方法、切片法效率更高。
[0058]
对空间高速自旋目标的isar三维成像,对于空间碎片目标的识别、姿态判断、关键运动阶段捕捉具有重要意义。
附图说明
[0059]
附图1是本发明isar成像模型
[0060]
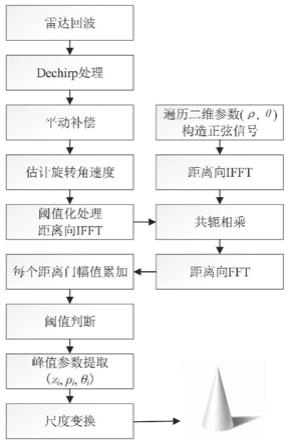
附图2是本发明方法流程图。
[0061]
附图3是本发明仿真散射点模型与回波数据图,其中,(a)三维散射点模型分布, (b)距离慢时间多分量正弦构成的回波,(c)全局阈值操作后的回波。
[0062]
附图4是本发明每个距离门所对应的fitness的最大匹配值(门限512*0.8)图。
[0063]
附图5是本发明符合阈值条件的距离门所对应的fitness平面图,其中(a)为符合阈值条件的第513个距离门所对应的匹配平面,(b)为符合阈值条件的第518个距离门所对应的匹配平面,(c)为符合阈值条件的第523个距离门所对应的匹配平面。
[0064]
附图6是本发明重建散射点isar成像结果图。
[0065]
附图7是本发明在复杂环境中参数估计的方差与均方根误差计算结果图,其中,(a) 不同信噪比下的参数估计的方差与均方根误差,(b)不同稀疏程度下参数估计的方差与均方根误差。
[0066]
附图8是本发明群目标距离压缩后的回波图,其中,(a)距离慢时间回波,(b)全局阈值操作后的回波。
[0067]
附图9是本发明不同旋转速度下的每个距离门所对应的最大匹配值图,其中,(a) 旋转角速度为3hz时距离门所对应的fitness的最大匹配程度的值(门限512*0.8),(b) 旋转角速度为5hz时距离门所对应的fitness的最大匹配程度的值(门限512*0.8)。
[0068]
附图10是本发明旋转角速度为3hz时满足阈值条件的距离门所对应的fitness平面图,其中,(a)为3hz旋转角速度时符合阈值条件的第467个距离门,(b)为3hz旋转角速度时符合阈值条件的第482个距离门,(c)为3hz旋转角速度时符合阈值条件的第 498个距离门,(d)为3hz旋转角速度时符合阈值条件的第537个距离门,(e)为3hz 旋转角速度时符合阈值条件的第538个距离门,(f)为3hz旋转角速度时符合阈值条件的第559个距离门,(g)为3hz旋转角速度时符合阈值条件的第571个距离门,(h)为 3hz旋转角速度时符合阈值条件的第582个距离门,(i)为3hz旋转角速度时符合阈值条件的第583个距离门。
[0069]
附图11是本发明旋转角速度为5hz时满足阈值条件的距离门所对应的fitness平面图,其中,(a)为5hz旋转角速度时符合阈值条件的第498个距离门,(b)为5hz旋转角速度时符合阈值条件的第513个距离门,(c)为5hz旋转角速度时符合阈值条件的第 525个距离门,(d)为5hz旋转角速度时符合阈值条件的第537个距离门,(e)为5hz 旋转角速度时符合阈值条件的第538个距离门,(f)为5hz旋转角速度时符合阈值条件的第582个距离门,(g)为5hz旋转角速度时符合阈值条件的第583个距离门。
[0070]
附图12是本发明群目标的三维isar重建图。
具体实施方式
[0071]
下面将结合本发明实施例中的附图对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0072]
一种基于时域相位匹配的空间高速自旋目标isar三维成像方法,所述三维成像方法包括以下步骤:
[0073]
步骤1:处理雷达回波数据;对线性调频信号的雷达回波对其进行平动补偿,并且估计角速度;
[0074]
步骤2:利用步骤1的雷达回波数据构造与之相对应的时域耦合项并进行共轭相乘;
[0075]
步骤3:利用步骤2不同匹配参数的处理时域耦合项后的结果,进行参数提取与坐标重构最终得到isar图像。
[0076]
进一步的,所述步骤1处理雷达回波数据具体为:首先对线性调频信号的雷达回波进行去斜率处理,再对其进行平动补偿,最后估计旋转角速度。
[0077]
进一步的,所述步骤1具体为,当目标的旋转速度远小于雷达的脉冲重复频率prf,通过补偿残余视频相位、回波包络斜置项后,距离慢时间雷达回波通过脉冲压缩方法使数据变换到距离慢时间域表示为(1)式s1(r,t
m
);其中t
p
,γ,λ指脉冲宽度、线性调频率、波长;t
m
是慢时间,r是快时间变换后的距离向;n为目标上散射点的个数;
[0078][0079]
其中r
i
(t
m
)由目标旋转引起的,它反映了散射点的微动状态;
[0080]
在高速自旋目标isar成像过程中,假设旋转轴矢量与雷达视线之间的角度α在观测时间内恒定;因此式(1)中r
i
(t
m
)写为
[0081]
r
ir
(t
m
)=z
i cosα+ρ
i sinαsin(θ
i
+ωt
m
)
ꢀꢀꢀ
(2)
[0082]
对距离慢时间域的信号(1)进行0.2*max的全局阈值操作,再对其距离向逆傅里叶变换ifft到快时间慢时间域得到
[0083][0084]
式(3)第二个相位项为快时间与慢时间的耦合项;如果完全匹配耦合项消除一个散射点的第二项相位,再对其做方位压缩,第一个相位项会使回波在距离慢时间域距离门内有一条包络不变的分量。
[0085]
进一步的,所述步骤2具体包括以下步骤:
[0086]
步骤2.1:在距离慢时间内构造一条沿慢时间呈正弦包络的信号;
[0087]
步骤2.2:利用步骤2.1的正弦信号沿距离向进行逆傅里叶变换,变换到快时间慢时间域;
[0088]
步骤2.3:再对雷达回波信号与参考信号的时域相位进行共轭相乘;
[0089]
步骤2.4:当构造的正弦参数与回波中的一条正弦包络的幅值和初始相位相同时,耦合相位项得到抑制,相位匹配;
[0090]
步骤2.5:再对处理后的信号做距离向傅里叶变换,会得到一条包络不变的分量,即原来雷达回波中的一条沿慢时间呈正弦包络的回波分量变成一条包络不变的回波分量。
[0091]
进一步的,所述步骤2具体包括以下步骤:
[0092][0093]
其中,s
mf
(r,t
m
)为;在距离慢时间域构造的一条正弦包络信号;
[0094]
构造z0=0的正弦,即在距离慢时间平面内正弦位于距离门的中心;
[0095]
式(4)进行距离向ifft可得到所需要构造的快时间慢时间耦合项:
[0096][0097]
其中,为时域的散射点回波数据,为参考信号在时域的共轭表达
形式,j为虚数单位,a
i
为目标的后向散射系数,为快时间,为旋转平面的投影高度,z0为参数匹配的高度,
[0098]
式(3)与式(5)共轭相乘结果为,此步即为时域相位匹配:
[0099][0100]
进一步的,所述步骤3的参数提取具体包括以下步骤:
[0101]
步骤c3.1:遍历不同的旋转半径、初始相位来构造时域耦合项;
[0102]
步骤c3.2:基于步骤c3.1的时域耦合项与时域回波进行共轭相乘,处理后的回波求和的结果,进行峰值参数提取。
[0103]
进一步的,所述步骤3的坐标重构具体包括以下步骤:
[0104]
步骤z3.1:时域耦合项共轭相乘后,进行方位向傅里叶变换,
[0105]
步骤z3.2:再然后沿慢时间累加每个距离门内回波;
[0106]
步骤z3.3:基于步骤3.1与3.2得到一个三维矩阵,即每个距离门r对应一个二维参数遍历的平面。
[0107]
进一步的,所述步骤3具体为,当存在一组参数有时,对式(6)进行距离压缩可得
[0108][0109]
式(7)表示当匹配的参数半径与相位回波中一条与正弦包络的参数完全相同时,进行距离压缩可得一条位于r=z
i
‑
z0的包络不变分量;其中,s
u
(r,ρ0,θ0,t
m
)为时域共轭相乘处理后进行距离压缩得到的回波,t
p
为脉冲重复周期,z
i
为第i个散射点的投影高度,z0为参数匹配的高度,为第j个散射点的投影旋转半径,ρ0为参数匹配的旋转半径,θ
j
为第j个散射点的初始相位,θ0为参数匹配的相位,ω为目标的旋转角速度,t
m
为慢时间;
[0110]
因此对回波进行二维参数匹配,每一组参数可以得到一个匹配后的s
u
(r,ρ0,θ0,t
m
) 累加式(7)中回波所在的每个距离门内的回波幅值,作为匹配的参考值;
[0111][0112]
经过二维的遍历参数,通过上述计算,每个距离门都对应一个匹配的峰值平面。
[0113]
进一步的,所述步骤3具体为,由ifft的特点可知,对fitness的值乘上距离门的数量m后,包络不变像素点的总个数,其中fitness数值大小代表在距离门内;对于每个距离门fitness中最大的值max(s
fitness
(r,ρ
extract
,θ
extract
)),选择一个阈值门限0.8*方位门数来判断s
fitness
(r,ρ0,θ0)上是否有散射点;
[0114]
对阈值操作后的s
fitness
(r,ρ0,θ0)平面上进行峰值提取,提取散射点的选择半径与
相位信息;高度信息即为距离门的大小r。其中c为光速,b为线性调频信号的带宽;
[0115][0116][0117]
θ
real
=θ
extract
ꢀꢀꢀ
(11)。
[0118]
基于计算机仿真的算法验证,采用工作在x波段的雷达,对应载频为10ghz,带宽为 2gh,脉冲重复频率为400hz,脉冲宽度50μs,方位门数512,距离门数1024。目标的旋转角速度为5hz,对应共有9个散射点如图3(a)所示。
[0119]
对目标isar回波的仿真如图3(b)所示,阈值化后的回波如图3(c)所示.对目标时域相位匹配后每个距离门所对应的最优匹配值如图4所示。三个满足阈值条件的距离门所对应的二维匹配平面如图5所示。通过峰值提取散射点即可重构坐标如图6所示。
[0120]
不同信噪比下的计算误差、均方误差如图7(a)所示。
[0121]
不同数据缺失情况下下的计算误差、均方误差如图7(b)所示。
[0122]
对多目标isar回波的仿真如图8(a)所示,阈值化后的回波如图8(b)所示.对目标时域相位匹配后满足阈值条件的距离门所对应的二维匹配平面如图9所示。满足条件的每个距离门的匹配平面如图10、图10一所示。对群目标的重建如图10二所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1