全站仪辅助的球机姿态测量与整平方法及装置与流程
1.本发明属于球机姿态测量与整平技术领域,特别是涉及一种全站仪辅助的球机姿态测量与整平方法及装置。
背景技术:
2.自然资源种类涵盖了山、水、林、田、湖、草等各类资源,如何有效监测和保护自然资源,如何监管修复中及修复后的生态环境,引导自然资源的合理开发与利用,是目前自然资源管理的重要工作,是整个生态环境监测监管治理与修复不可或缺的重要一环。目前自然资源监控监管技术手段比较落后,主要技术手段仍为卫片、人工巡查等,易造成监控监管不及时、不彻底。
3.为解决上述问题,利用通信铁塔、超高层建筑等高点建立视频综合监测站,通过相机云台一体化的球机获取7*24小时全天候的实时视频,自动识别破坏自然资源的违法目标,并通过摄影测量原理在视频影像上对目标进行自动定位,将位置显示在地图上以进行快速导航,使执法人员能够迅速到达现场并进行违法行为的及时制止。
4.为了使视频监控能够达到监测区域全覆盖的同时尽量节省成本,综合监测站采用能水平360
°
、竖向90
°
旋转的相机云台一体的球机。在高点综合监测站安装球机时,要求球机的中心竖轴能够尽可能的保持竖直(与水平面垂直),为后续相机姿态参数的迭代解算提供初值,以进行视频影像中目标的精准定位。而现有的相机和云台的组合产品中并没有类似全站仪的高精度整平系统,能够调节系统竖轴与铅垂线夹角以使其竖直。因此,研制一套球机姿态测量与整平方法及装置成为目标定位的前置关键问题。
技术实现要素:
5.有鉴于此,本发明旨在克服上述现有技术中存在的缺陷,提供一种全站仪辅助的球机姿态测量与整平方法,解决球机没有高精度整平系统,无法调整竖轴使其竖直的问题。
6.本发明的另一个目的在于提供一种球机整平装置。
7.为达到上述目的,本发明的技术方案是这样实现的:
8.一种球机姿态测量与整平方法,该方法包括以下步骤:
9.步骤一:利用全站仪测量标定板角点的物方坐标;
10.步骤二:控制球机上的相机获取标定板影像,对角点进行特征提取,获得标定板角点的像方坐标;
11.步骤三:根据角点的物方坐标和像方坐标计算球机的位姿参数,计算球机的竖轴与铅垂线的夹角并实时显示;
12.步骤四:多次重复步骤二和步骤三,调节球机姿态,使球机的竖轴与铅垂线的夹角不断趋近于0,直至绝对值小于设定的阈值为止;
13.步骤五:控制球机水平旋转90
°
,重复步骤二至步骤四,至球机的竖轴与铅垂线的夹角绝对值小于设定的阈值,完成整平。
14.为便于描述,将球机竖轴与铅垂线的夹角分解为二维分量α和β,其中,α为球机竖轴与铅垂线夹角沿球机相机主光轴方向的分量,β为球机竖轴与铅垂线夹角沿球机主光轴逆时针水平旋转90
°
方向的分量。本发明中,步骤二至四用于调节α角,步骤五用于调节β角。
15.进一步地,所述利用全站仪测量标定板角点的物方坐标的具体方法为:
16.利用全站仪测量标定板的4个边缘角点,根据标定板上的棋盘格尺寸计算出标定板上所有角点的物方坐标。
17.所用标定板为铝制高精度漫反射标定板,由玻璃基板与氧化铝面板构成:玻璃基板厚约3mm,为平整的浮法玻璃,平度高且无水波纹,不易变形,满足张正友标定法的角点应高度处于同一平面的要求;氧化铝面板为白色略灰,表面不反光,厚度约为0.15mm,面板图案为12*9阵列的黑白棋盘方格,方格边长为30mm,角点打印精度高。
18.球机的标定需要保持水平的物方坐标系,全站仪是测量专业中使用最广的建立水平坐标系的设备,简单快速且精度很高。
19.操作时,首先利用全站仪测量标定板的4个边缘角点,由于标定板打印精度很高,根据棋盘格尺寸即可计算出所有角点的物方坐标,无需一一测量。具体步骤如下:
20.角点p
i
·
j
(i=1,2...,8j=1,2,...,11)分布为横向11个点纵向8个点,相邻点间距为3mm,全站仪测得的边缘四点坐标分别为:左上角点p1·1(x1·1,y1·1,z1·1)、左下角点p8·1(x8·1,y8·1,z8·1)、右上角点p1·
11
(x1·
11
,y1·
11
,z1·
11
)、右下角点p8·
11
(x8·
11
,y8·
11
,z8·
11
)。首先计算第一列点p
i
·1(i=2,3,...7)坐标,计算公式为:
[0021][0022][0023][0024]
计算第11列点p
i
·
11
(i=2,3,...7)坐标,计算公式为:
[0025][0026][0027][0028]
根据第1列和第11列点坐标,计算第1行至第8行的点p
i
·
j
(i=1,2,...8j=2,3,...,10)坐标,计算公式为:
[0029][0030][0031][0032]
进一步地,所述控制球机上的相机获取标定板影像,对角点进行特征提取,获得标定板角点的像方坐标的具体方法为:
[0033]
控制球机上的相机获取标定板影像,利用harris检测方法对影像中的角点进行特
征提取,获得角点的像方坐标;
[0034]
harris检测方法的具体步骤为:利用局部小窗口在整张标定板影像的各个方向上进行移动,计算窗口内图像的灰度变化,即灰度梯度,当窗口在移动时,窗口内的图像在各个方向上的灰度梯度均较大时,当前小窗口中心即为棋盘格角点,中心点坐标即为标定板角点的像方坐标。
[0035]
计算梯度e(u,v)的公式为:
[0036][0037]
其中,(u,v)为平移窗口大小,i(x,y)]为图像灰度值,i(x+u,y+v)为平移后灰度值,w(x,y)为窗口函数,位于窗口外为0,窗口内为1。
[0038]
进一步地,所述根据角点的物方坐标和像方坐标计算球机的位姿参数,计算球机的竖轴与铅垂线的夹角并实时显示的具体方法为:
[0039]
利用张正友标定法,根据角点的物方坐标和像方坐标,计算球机的位姿参数,包括内方位元素(像主点坐标、焦距)和外方位元素(旋转参数和平移参数);
[0040]
利用罗德里格斯变换,将位姿参数中的旋转参数转换为旋转角,其中包含球机竖轴与铅垂线夹角的分量α,并实时显示;
[0041]
计算旋转角的具体步骤如下:
[0042]
根据角点的物方和像方坐标,利用张正友标定法解算球机的姿态参数r,即:
[0043][0044]
利用罗德里格斯变换计算三维向量r=[r
x
r
y
r
z
]:
[0045][0046]
r
x
即为球机竖轴与铅垂线夹角的分量α。
[0047]
进一步地,所述根据角点的物方坐标和像方坐标计算球机的位姿参数,计算球机的竖轴与铅垂线的夹角并实时显示,实时显示的具体方法为:利用opencv图像处理库,绘制模拟水准器,根据α值确定模拟水准器中气泡位置并进行实时绘制显示;水准器的刻度范围为
‑
0.1
°
至0.1
°
。
[0048]
绘制模拟水准器的具体方法为:利用opencv图像处理库,绘制矩形图像作为虚拟水准器本体,再在虚拟水准器本体图像上绘制虚拟的气泡,气泡所在的刻度位置由以下公式计算得到:
[0049][0050]
其中k为气泡所在刻度,α为球机竖轴与铅垂线的夹角值。
[0051]
使用时,根据夹角值α连续绘制图像,形成动态变化的模拟水准器,对α值进行直观展示,使用模拟水准器的目的在于保证水准器的水平度准确性。
[0052]
进一步地,所述多次重复步骤二和步骤三,调节球机姿态,使球机的竖轴与铅垂线的夹角不断趋近于0,直至绝对值小于设定的阈值为止的具体方法为:
[0053]
多次控制球机的相机获取标定板影像,并进行角点像方坐标的标定和α值的计算,模拟水准器中的气泡实时显示;
[0054]
根据实时气泡位置和α值,手动调节球机,球机姿态随之变化,α值改变,气泡随之移动;
[0055]
根据α值的绝对值和气泡的动态变化调节球机姿态,使气泡趋近于模拟水准器的中央,直至α值的绝对值小于设定的阈值为止;该设定的阈值为经验阈值0.01
°
。
[0056]
进一步地,步骤五中,控制球机水平旋转90
°
,重复步骤二至步骤四,至β值的绝对值小于经验阈值0.01
°
为止,最终竖轴保持竖直,完成整平。
[0057]
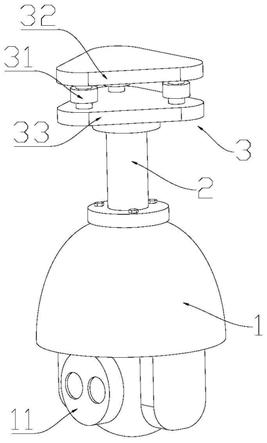
一种用于调节球机姿态的球机整平装置,包括脚螺旋基座和铝制连接件,所述连接件固定于球机顶部,相机位于球机的底部,所述脚螺旋基座固定于连接件顶部,所述脚螺旋基座为现有技术,可选用gdf22型对点基座,具体包括三个脚螺旋以及设置于三个脚螺旋上下两端的上支撑座和下支撑座,下支撑座的底部设有螺杆,该螺杆旋于连接件顶部所设螺纹孔内,将基座和连接件连接固定,连接件和球机通过多个螺丝固定连接。通过上连接座与支撑架体装配固定,将整个装置吊装后,即可通过旋转三个方向的脚螺旋调整球机的姿态。
[0058]
相对于现有技术,本发明的有益效果是:
[0059]
(1)该全站仪辅助的球机姿态测量与整平方法及装置,利用全站仪建立高精度水平的物方坐标系,通过球机的相机实时标定解算球机竖轴与铅垂线夹角。
[0060]
(2)该全站仪辅助的球机姿态测量与整平方法及装置,绘制了模拟水准器,并通过实时气泡位置可视化地反映球机竖轴与铅垂线夹角大小,通过整球机姿态以减小夹角,最终在二维方向上整平球机。
[0061]
(3)该全站仪辅助的球机姿态测量与整平方法及装置,研制了一套球机整平装置,根据脚螺旋基座和球机结构加工连接件,将基座和球机固定连接,通过脚螺旋调节球机姿态。
附图说明
[0062]
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
[0063]
在附图中:
[0064]
图1示出了本发明所述的球机及球机整平装置的整体结构示意图;
[0065]
图2示出了本发明所述的球机姿态测量与整平方法所使用的铝制高精度漫反射标定板实物图;
[0066]
图3示出了本发明所述的球机姿态测量与整平方法的标定板角点检测结果显示画面;
[0067]
图4示出了本发明所述的球机姿态测量与整平方法的模拟水准器显示画面。
[0068]
附图标记说明:
[0069]1‑
球机;11
‑
相机;2
‑
连接件;3
‑
脚螺旋基座;31
‑
脚螺旋;32
‑
上支撑座;33
‑
下支撑
座。
具体实施方式
[0070]
除有定义外,以下实施例中所用的技术术语具有与本发明所属领域技术人员普遍理解的相同含义。
[0071]
为了更好地理解本发明的技术方案,下面结合附图和具体实例对本发明作进一步详细说明:
[0072]
操作过程:
[0073]
第一步,将标定板稳定摆放,保证大致正对球机镜头,并使标定板全部包含在球机摄取的影像中。标定板角点排列如附表1所示。
[0074]
在附近区域架设全站仪,整平对中后测量标定板边缘四点坐标,分别为:左上角点p1·1(x1·1,y1·1,z1·1)、左下角点p8·1(x8·1,y8·1,z8·1)、右上角点p1·
11
(x1·
11
,y1·
11
,z1·
11
)、右下角点p8·
11
(x8·
11
,y8·
11
,z8·
11
)。计算标定板其他所有角点的坐标,如附表2中物方坐标所示。
[0075]
第二步,软件控制球机实时获取标定板影像,利用harris检测方法对影像中的角点进行特征提取,如附图3所示,获得角点的像方坐标,与附表2中物方坐标所示的坐标数值相同。
[0076]
第三步,利用张正友标定法,根据角点物方和像方坐标,计算球机的位姿参数,内方位元素为:
[0077]
像主点坐标:x=960,y=540
[0078]
焦距:f=5335
[0079]
外方位元素为:
[0080]
旋转参数:
[0081]
平移参数:t=[498.965
ꢀ‑
148.286
ꢀ‑
929.056]
[0082]
利用罗德里格斯变换将旋转参数r转换为旋转角:
[0083]
θ=[
‑
69.127
ꢀ‑
1.042
ꢀ‑
0.515]
[0084]
球机竖轴与铅垂线夹角的分量α=
‑
0.515
°
。绘制模拟水准器,根据α值确定气泡位置,如附图4所示。转动基座脚螺旋,使气泡逐渐移动至中央。
[0085]
第四步,重复第二步和第三步,直到α绝对值小于0.01
°
为止。
[0086]
第五步,控制球机水平旋转90
°
,重复第二步至第四步,直至β绝对值小于经验阈值0.01
°
为止。最终竖轴保持竖直,完成整平。
[0087]
表1
[0088][0089]
表2
[0090]
[0091]
[0092][0093]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1