温度计测装置、机械系统、温度计测方法以及记录介质与流程
1.本公开涉及一种温度计测装置、机械系统、温度计测方法以及记录介质。
背景技术:
2.在专利文献1中公开了一种温度测定方法,使用了能够通过在介质内传播超声波来测定该介质内的温度分布的超声波。
3.现有技术文献
4.专利文献
5.专利文献1:日本专利第4843790号公报
6.专利文献2:日本特开2003-42857号公报
技术实现要素:
7.发明所要解决的问题
8.在一般的旋转机械设备的轴承中,在由于高转速/高表面压力化而使运转条件变得苛刻的过程中,在轴承内部侧的表面层叠耐载荷性/耐磨耗性高的复合材料而成的多层构造轴承的应用正在发展。
9.通常,轴承的温度通过在处于离轴承内部侧的表面(复合材料的表面)数毫米程度深的位置的母材(背垫金属(backmetal))内设置的热电偶、测温电阻体来进行计测/监视。但是,在多层构造轴承的情况下,处于轴承内部侧的表面的复合材料的热传导率低,因此,在上述方法中,即使是随着异常的产生而在轴承内部侧的表面产生了温度变化的情况下,相对于该温度变化的灵敏度也很低。也就是说,在上述方法中,无法及时地监视具有多层构造的轴承的表面温度。
10.本公开的目的在于,提供一种能够及时地监视具有多层构造的构造体的内部侧的表面温度的温度计测装置、机械系统、温度计测方法以及记录介质。
11.技术方案
12.根据本公开的一个方案,温度计测装置具备:超声波传感器,安装于具有多层构造的构造体的背面侧;获取部,经由所述超声波传感器获取入射至所述构造体的内部侧的超声波的反射波信号;提取部,提取所述反射波信号中的包括在所述构造体的内部侧表面反射的反射波的区域;以及确定部,基于所述提取出的区域中的反射波信号来确定所述构造体的内部侧表面的温度。
13.根据本公开的一个方案,温度计测方法使用安装于具有多层构造的构造体的背面侧的超声波传感器,所述温度计测方法具有:经由所述超声波传感器获取入射至所述构造体的内部侧的超声波的反射波信号的步骤;提取所述反射波信号中的包括在所述构造体的内部侧表面反射的反射波的区域的步骤;以及基于所述提取出的区域中的反射波信号来确定所述构造体的内部侧表面的温度的步骤。
14.根据本公开的一个方案,程序使具备安装于具有多层构造的构造体的背面侧的超
声波传感器的温度计测装置的计算机执行:经由所述超声波传感器获取入射至所述构造体的内部侧的超声波的反射波信号的步骤;提取所述反射波信号中的包括在所述构造体的内部侧表面反射的反射波的区域的步骤;以及基于所述提取出的区域中的反射波信号来确定所述构造体的内部侧表面的温度的步骤。
15.发明效果
16.根据上述各个方案,能够及时地监视具有多层构造的轴承的表面温度。
附图说明
17.图1是表示本公开的至少一个实施方式的机械系统的整体构成的图。
18.图2是表示本公开的至少一个实施方式的超声波传感器的设置方法的图。
19.图3是表示本公开的至少一个实施方式的温度计测装置的功能构成的图。
20.图4是表示本公开的至少一个实施方式的界面温度表的例子的图。
21.图5是表示本公开的至少一个实施方式的温度计测装置的处理流程的图。
22.图6是本公开的至少一个实施方式的温度计测装置的处理的说明图。
23.图7是本公开的至少一个实施方式的温度计测装置的处理的说明图。
24.图8是表示本公开的至少一个实施方式的超声波传感器的设置方法的图。
25.图9是表示本公开的至少一个实施方式的超声波传感器的设置方法的图。
26.图10是表示本公开的至少一个实施方式的超声波传感器的设置方法的图。
27.图11是表示本公开的至少一个实施方式的机械系统的构成的一部分的图。
28.附图标记说明
29.1 温度计测装置
30.1a 计算机
31.10 cpu
32.100 获取部
33.101 提取部
34.102 确定部
35.103 接触判定部
36.11 内存
37.12 输出设备
38.13 输入设备
39.14 连接接口
40.15 存储器
41.2 旋转机械(机械)
42.3 内燃机(机械)
43.9 机械系统
44.b 轴承(构造体)
45.l 缸套
46.r 转子
47.bm 背垫金属
48.c 复合材料
49.o 油层
50.s1 超声波传感器
51.s2 热电偶(基准温度传感器)
52.t 界面温度表
具体实施方式
53.《第一实施方式》
54.以下,参照图1~图6对第一实施方式的温度计测装置和具有该温度计测装置的机械系统进行说明。
55.(机械系统的构成)
56.图1是表示第一实施方式的机械系统的整体构成的图。
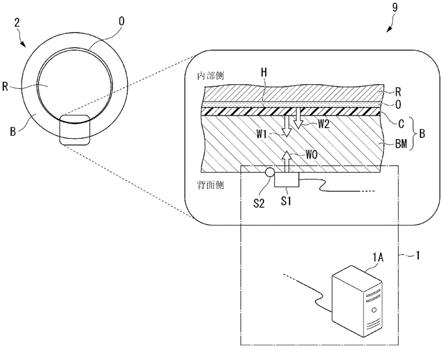
57.如图1所示,机械系统9具有温度计测装置1和旋转机械2而成。
58.旋转机械2例如是涡轮机等。图1图示了沿旋转轴方向观察旋转机械2的轴承b、转子r以及油层o的样子。如图1所示,作为旋转机械2的构造体的轴承b为位于背面侧的背垫金属bm与位于内部侧的复合材料c的多层构造。复合材料c是以轴承b的耐载荷性/耐磨耗性的提高为目的而设置,例如是peek(polyetheretherketone:聚醚醚酮)材料等。复合材料c的厚度例如为3mm左右。
59.温度计测装置1始终监视在旋转机械2的运转中的轴承内部侧的表面的温度。温度计测装置1基于后述的构成,能够及时地监视旋转机械2的轴承内部侧的表面(以下,也记为“内部侧表面h”)的温度。由此,机械系统9实现旋转机械2中的早期的异常感测和紧急停止。
60.如图1所示,温度计测装置1具备:计算机1a、超声波传感器s1、以及作为基准温度传感器(后述)发挥功能的热电偶s2。超声波传感器s1和热电偶s2设置于轴承b的背面侧表面。
61.超声波传感器s1按固定周期向轴承b的内部侧入射超声波并观测其反射波。在以下的说明中,也将从超声波传感器s1输出的超声波记为入射波w0。此外,也将在背垫金属bm与复合材料c的界面产生的反射波记为第一反射波w1。此外,也将在复合材料c与油层o的界面(也就是说,轴承b的内部侧表面)产生的反射波记为第二反射波w2。
62.(超声波传感器的设置)
63.图2是表示第一实施方式的超声波传感器的设置方法的图。
64.如图2所示,在本实施方式中,超声波传感器s1通过粘接剂和模塑剂固定设置于轴承b的背面侧表面。
65.(温度计测装置的功能构成)
66.图3是表示第一实施方式的温度计测装置的功能构成的图。
67.如图3所示,温度计测装置1的计算机1a具有:cpu(central processing unit:中央处理器)10、内存11、输出设备12、输入设备13、连接接口14a、14b以及存储器15。
68.cpu10是管理温度计测装置1的全部处理的处理器,通过按照预先准备的程序进行动作而具有各种功能。关于cpu10的具体的处理将在后文叙述。
69.内存11是所谓的主存储装置,供cpu10的动作所需的命令、数据展开。
70.输出设备12是显示监视器(液晶显示器、有机el显示器)、扬声器等输出装置。
71.输入设备13是鼠标、键盘、触摸传感器等输入装置。
72.连接接口14a、14b分别是与安装于旋转机械2的轴承b的超声波传感器s1、热电偶s2的连接接口。需要说明的是,连接接口14a具有:脉冲控制部,针对超声波传感器s1,用于进行超声波入射;以及a/d变换部,针对超声波传感器s1,用于反射波取入。
73.存储器15是所谓的辅助存储装置,例如是hdd(hard disk drive:硬盘驱动器)、ssd(solid state drive:固态驱动器)等为好。在本实施方式中,存储器15存储有预先准备的界面温度表t(后述)。
74.接着,对cpu10的功能进行说明。
75.如图3所示,cpu10具有作为获取部100、提取部101、确定部102以及接触判定部103的功能。
76.获取部100经由超声波传感器s1获取入射至轴承b的内部侧的超声波(入射波w0)的反射波信号。在此,反射波信号是指入射波w0的反射波(第一反射波w1和第二反射波w2)的信号强度的时序信息。
77.提取部101提取获取部100获取到的反射波信号中的包括在轴承b的内部侧表面h反射的反射波(也就是说第二反射波w2)的时域。
78.确定部102基于由提取部101提取出的时域中的反射波信号(表示第二反射波w2的强度的信号)来确定轴承b的内部侧表面h的温度(以下,也记为“内部侧表面温度”)。
79.接触判定部103经由超声波传感器s1获取属于预先确定的频带的、与超声波传感器s1自己输出的入射波w0不同的频带的超声波信号。然后,接触判定部103基于该超声波信号,进行转子r与轴承b的接触判定。
80.(界面温度表)
81.图4是表示第一实施方式的界面温度表的例子的图。
82.如图4所示,界面温度表t是能够根据第二反射波w2的“振幅”与从热电偶s2获取的“基准温度”的组合来唯一地确定轴承b的内部侧表面温度的信息表。像这样的界面温度表t是基于另行实施的模拟试验结果等事先准备的。
83.已知,通常对于某界面中的超声波的反射率,其界面温度越高则反射率越大。也就是说,界面温度(轴承b的内部侧表面温度)越高,则第二反射波w2的振幅越大。因此,可以认为,若温度计测装置1参照第二反射波w2的振幅,则能够唯一地确定轴承b的内部侧表面温度。但是,反射波的强度不仅依赖于界面温度,还在很大程度上依赖于其超声波传播的材料的温度。即,入射波w0和第二反射波w2在背垫金属bm内一边逐渐衰减一边传播,该衰减的程度依赖于背垫金属bm的温度而增大/减小。
84.例如,设为某时刻t在轴承b和转子r产生接触异常从而轴承b的内部侧表面温度上升。在产生了异常的瞬间(时刻t),背垫金属bm的内部成为标准温度(通常运转时的温度),但随着时间的经过,高温区域从产生异常的部位起逐渐朝向背垫金属bm背面侧的方向逐渐扩展。于是,随着时间的经过,入射波w0和第二反射波w2传播背垫金属bm内的高温区域的比例增大,因此,在传播中衰减的程度增大。由此,实际上由超声波传感器s1观测的第二反射波w2的振幅从异常产生起随着时间经过,而逐渐变得比与内部侧表面温度理想地对应的振幅小。
85.因此,本实施方式的温度计测装置1考虑了背垫金属bm内的温度上升中的衰减的程度,因此,基于由热电偶s2计测的基准温度来校正内部侧表面温度的观测值。
86.像这样,温度计测装置1还具备:热电偶s2(基准温度传感器),与超声波传感器s1相同地安装于轴承b的背面侧。然后,确定部102获取基于热电偶s2的轴承b的背面侧表面的温度(基准温度),并且基于反射波信号和背面侧表面的温度这两者来确定轴承b的内部侧表面温度。需要说明的是,基准温度也可以不基于热电偶s2进行计测,例如,通过根据超声波的传播时间计测温度分布等其他方法来进行计测。
87.(温度计测装置的处理流程)
88.图5是表示第一实施方式的温度计测装置的处理流程的图。此外,图6是第一实施方式的温度计测装置的处理的说明图。以下,参照图5、图6对温度计测装置1的处理的流程进行详细地说明。需要说明的是,图5所示的处理流程在旋转机械2的运转中,按固定周期重复实施。
89.首先,温度计测装置1的获取部100经由超声波传感器s1获取反射波信号(步骤s1)。如上所述,该反射波信号是超声波传感器s1自身输出的入射波w0的反射波的强度的时序信息。入射波w0例如作为数mhz级别的频率的超声波而输出。
90.在此,图6图示了获取部100所获取的反射波信号的例子。如图6所示,超声波传感器s1在入射波w0的输出后,首先观测在背垫金属bm与复合材料c的界面反射的第一反射波w1,接着观测在复合材料c与油层o的界面反射的第二反射波w2。此外,第一反射波w1的观测与第二反射波w2的观测存在时间差是因为复合材料c的厚度量的路程差。需要说明的是,入射波w0不仅在背垫金属bm与复合材料c的界面、复合材料c与油层o的界面产生,也在油层o与转子r的界面产生(也将其记为第三反射波),但是,一般油层o为数十μm,非常薄,因此该第三反射波无法与第二反射波w2分离,作为成为一体的反射波w2进行处理。
91.返回图5,接着,温度计测装置1的提取部101从在步骤s01获取到的反射波信号中提取包括第二反射波的振幅的时域(步骤s02)。在此,如图6所示,例如,提取部101提取只有第二反射波w2的振幅为时域的时刻t1~t2的区域。时刻t1~t2的时域例如是根据过去的观测结果等事先确定的。
92.返回图5,接着,温度计测装置1的确定部102计测由提取部101提取出的反射波信号的振幅,还经由热电偶s2获取基准温度。然后,确定部102参照界面温度表t(图4),确定与第二反射波w2的振幅和基准温度对应的界面温度(轴承b的内部侧表面温度)并输出(步骤s03)。
93.接着,温度计测装置1的接触判定部103进行轴承b与转子r的接触判定(步骤s04)。在轴承b与转子r有接触的情况下,产生由机械的构造特征决定的频带(例如数百khz程度)的超声波。因接触而产生的频带与超声波传感器s1所输出的超声波的频带不重复。因此,接触判定部103经由超声波传感器s1对有无属于数百khz的频带的超声波进行监视。然后,在观测到超过接触判定部103的判定阈值的数百khz带的超声波的情况下,判定为轴承b与转子r接触并输出其结果。
94.(作用效果)
95.以上,第一实施方式的温度计测装置1具有:超声波传感器s1,安装于具有多层构造的轴承b的背面侧;获取部100,经由超声波传感器s1获取入射至轴承b的内部侧的超声波
的反射波信号;提取部101,提取获取部100所获取到的反射波信号中的包括在轴承b的内部侧表面h反射的反射波(第二反射波w2)的区域;以及确定部102,基于由提取部101提取出的区域中的反射波信号来确定轴承b的内部侧表面温度。
96.通过像这样设置,能够以超声波的反射波的振幅高精度地推定具有多层构造的轴承b的内部侧表面温度。因此,根据第一实施方式的温度计测装置1,能够及时地监视具有多层构造的轴承的内部侧的表面温度。
97.此外,第一实施方式的温度计测装置1还具备:基准温度传感器(热电偶s2),安装于轴承b的背面侧。然后,确定部102获取基于热电偶s2的轴承b的背面侧表面的温度(基准温度),并且基于反射波信号的强度(第二反射波w2的振幅)和背面侧表面的温度这两者来确定轴承b的内部侧表面的温度。
98.通过像这样设置,能够在综合考虑在轴承b(背垫金属bm)内部产生的超声波的衰减的影响的基础上,确定内部侧表面温度。
99.此外,第一实施方式的温度计测装置1还具备:接触判定部103,经由超声波传感器s1获取属于预先确定的频带(数百khz带)的超声波信号,基于该超声波信号来进行转子r与轴承b的接触判定。
100.通过像这样设置,能够同时进行温度的异常感测与接触判定的异常感测这两者,因此,能够提供安全性更高的机械系统。
101.(第一实施方式的变形例)
102.以下,对第一实施方式的变形例进行说明。
103.在第一实施方式中,对确定部102参照界面温度表t并根据第二反射波的振幅与基准温度的组合来确定内部侧表面温度进行了说明,但在其他实施方式中,并不限于此。
104.例如,也可以是第一实施方式的变形例的确定部102使用将第二反射波的振幅和基准温度设为说明变量(x1,x2)、将内部侧表面温度设为目的变量(y)的模型函数f,计算y=f(x1,x2),确定内部侧表面温度。此外,在该情况下,模型函数f的参数也可以设为由机械学习学习并鉴定的参数。
105.图7是第一实施方式的其他变形例的温度计测装置的处理的说明图。
106.接着,参照图7对第一实施方式的其他变形例进行说明。
107.已知随着背垫金属bm的内部的温度变化,超声波的传播速度也变化。因此,随着背垫金属bm的温度变化,第二反射波w2的相对于入射波w0的输出时间的到达时间也变化。因此,本变形例的提取部101也可以根据由热电偶s2获取的基准温度来改变提取第二反射波w2的时域(时刻t1~t2)。此外,相对于基准温度的时域的改变的程度是由机械学习鉴定的参数之一为好。
108.《第二实施方式》
109.以下,参照图8对第二实施方式的机械系统进行说明。
110.图8是表示第二实施方式的超声波传感器的设置方法的图。
111.如图8所示,第二实施方式的旋转机械2的轴承b具有从背面侧表面朝向内侧设置的凹部k。然后,温度计测装置1的超声波传感器s1安装于凹部k。需要说明的是,虽省略图示,但热电偶s2也与超声波传感器s1同样地安装于凹部k。
112.通过像这样设置,入射波w0和第二反射波w2传播背垫金属bm的距离在物理上缩
短。于是,入射波w0和第二反射波w2在背垫金属bm传播中的衰减的程度降低,因此,能够提高由超声波传感器s1观测的第二反射波w2的信号强度。因此,能够清晰地捕捉与内部侧表面温度的变化相应的第二反射波w2的振幅的变化,从而能够提高内部侧表面温度的检测精度。
113.(第二实施方式的变形例)
114.图9、图10分别是表示第二实施方式的变形例的超声波传感器的设置方法的图。
115.在第二实施方式的变形例的机械系统9中,例如,如图9、图10所示,也可以是经由装配夹具j安装于凹部k的内部的方案。
116.具体而言,是如下的方案:在凹部k的内侧表面设有螺纹槽,装配夹具j自身作为固定螺钉安装于凹部k。
117.由此,能够减轻超声波传感器s1的更换作业的负担。
118.此外,在上述的各个实施方式和变形例中,对温度计测装置1具有热电偶s2(基准温度传感器)进行了说明,在其他实施方式中也可以不具备热电偶s2。即,其他实施方式的温度计测装置1也可以仅通过基于超声波传感器s1的第二反射波w2的信号强度(振幅)来计测轴承b的内部侧表面温度。在该情况中,例如,温度计测装置1也可以累积地计测高温区域随着发热而在背垫金属bm内部逐渐扩展,第二反射波w2时时刻刻衰减的经时的动作,即累积地计测从初期温度起的振幅变化,由此来确定内部侧表面温度。
119.《第三实施方式》
120.接着,参照图11对第三实施方式的机械系统进行说明。
121.(机械系统的构成)
122.图11是表示本公开的至少一个实施方式的机械系统的构成的图。如图11所示,本实施方式的机械系统9是包括作为发动机的内燃机3的系统。温度计测装置1将作为该内燃机3的构造体的缸套l和油层o的多层构造设为温度计测对象(在本实施方式中,缸套l和油层o的组相当于“具有多层构造的构造体”。)。温度计测装置1将缸套l和配置于油层o的内部侧的活塞p的活塞环pr的表面(内部侧表面h)的温度设为计测对象。
123.机械系统9的超声波传感器s1设置于缸套l的背面侧。超声波传感器s1朝向缸套l的内部侧输出入射波w0,分别观测第一反射波w1、第二反射波w2。在本实施方式中,如图11所示,第一反射波w1是在缸套l与油层o的界面的反射波。此外,第二反射波w2是在油层o与活塞环pr的界面的反射波。本实施方式的温度计测装置1能够基于第二反射波w2的振幅的观测结果,及时地计测活塞环pr的表面温度。
124.在上述实施方式中,温度计测装置1的各种处理的过程以程序的形式存储于计算机可读记录介质,通过计算机读出并执行该程序来进行上述各种处理。此外,计算机可读取记录介质是指磁盘、光磁盘、cd-rom、dvd-rom以及半导体内存等。此外,也可以通过通信线路将该计算机程序传送至计算机中,使接收了该传送的计算机执行该程序。
125.上述程序也可以用于实现上述功能的一部分。而且,也可以是能以与已记录于计算机系统中的程序组合来实现上述功能的所谓的差分文件(差分程序)。
126.如上所述,对本公开的几个实施方式进行了说明,但所有的这些实施方式是作为例子示出的,并没有试图限定发明的范围。这些实施方式也可以通过其他的各种方式来实施,且能在不脱离发明的主旨的范围内进行各种省略、置换、变更。这些实施方式及其变形
包括在发明的范围、主旨中,同样,包括在权利要求书所记载的发明和与其同等的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1