一种用于海洋测量无人艇自动收放磁力仪的系统及其方法与流程
1.本发明属于无人船舶控制技术领域,尤其是一种用于海洋测量无人艇自动收放磁力仪的系统及其方法。
背景技术:
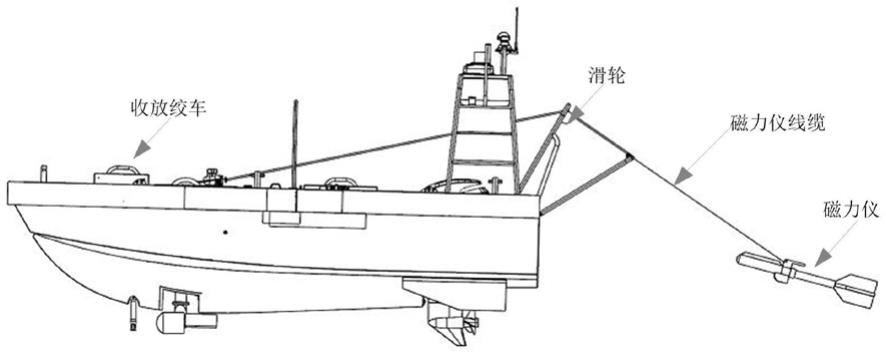
2.群岛礁附近海况复杂、地形突变、磁力信息突变,大型测量船、有人岛礁测量艇或安装单波束测深仪、多波束测深系统、磁力仪、重力仪的地方渔船前往该海域进行测量测绘时存在较大安全隐患,难于获取岛礁附近的海底地形信息。采用无人艇搭载单波束测深仪、多波束测深系统、磁力仪、重力仪进行海洋重力、磁力、地形地貌测量,可以解决该问题。而海洋测量无人艇上搭载的海洋磁力仪设备为昂贵的进口测量仪器,托鱼式结构,如图1所示,通过电缆挂在海洋测量无人艇尾部的拖鱼支架上。海洋磁力测量通过使用海洋测量无人艇拖曳电磁力设备进行的地磁测量,为了消除测量船体的固定磁场和感应磁场对磁力拖鱼传感器的影响,需要加长拖曳电缆的长度,规范要求一般拖曳电缆长度应大于测量船长的3倍。海洋测量无人艇(铝合金艇体)艇长度7.5米,磁力测试试验时磁力仪缆绳长度22.5米以上。当海洋测量无人艇的航速、航向、水域水深发生突变时,容易发生磁力仪设备扎进海底泥层或碰撞附近的航标、渔网、船只等事故,造成昂贵的磁力仪设备损坏。
技术实现要素:
3.本发明的目的在于克服现有技术的不足,提出一种用于海洋测量无人艇自动收放磁力仪的系统及其方法,能够确保磁力仪设备安全,同时提高磁力测量试验效率。
4.本发明解决其技术问题是采取以下技术方案实现的:
5.一种用于海洋测量无人艇自动收放磁力仪的系统,包括装置及其控制单元,所述装置包括收放绞车、磁力仪线缆、拖鱼支架和磁力仪,所述收放绞车安装在无人艇上,拖鱼支架安装在无人艇船尾,收放绞车连接磁力仪线缆的一端,磁力仪线缆通过拖鱼支架连接磁力仪;控制单元包括无人艇主控制单元、自动收放磁力仪控制单元、磁力仪绞车、舵角传感器、gps、北斗设备、测深仪和光纤罗经,无人艇主控制单元和磁力仪绞车分别通过rs422与自动收放磁力仪控制单元双向连接,舵角传感器与自动收放磁力仪控制单元双线连接,用于传输采集到的信号,gps、北斗设备、测深仪和光纤罗经分别通过rs422与自动收放磁力仪控制单元连接。
6.而且,所述舵角传感器包括第一双向二极管bav99、第二双向二极管bav99、第一静电抑制二极管pesd15vl2bt、第二静电抑制二极管pesd15vl2bt、隔离变送器t5555p、三端稳压芯片lm78l09、ad转换芯片ad8552、瞬态抑制二极管smbj15a
‑
tr、电阻r79、电阻r80、电阻r82、电阻r83、电阻r84、电容c42、电容c43、电容c44和电容c45,其中,隔离变送器t5555p的pin+管脚连接12v电源,隔离变送器t5555p的pin
‑
管脚接地, adc1_in分别连接第一双向二极管bav99的第三管脚、第一静电抑制二极管pesd15vl2bt 的第二管脚和隔离变送器t5555p的sin+管脚,第一双向二极管bav99的第一管脚连接 adc1_gnd,第一双向二极管
bav99的第二管脚连接adc1_vcc,第一静电抑制二极管pesd15vl2bt的第三管脚连接adc1_gnd,隔离变送器t5555p的sin
‑
管脚连接 adc1_gnd,隔离变送器t5555p的sout+管脚分别连接第二静电抑制二极管pesd15vl2bt 的第一管脚和adc1_out,第二静电抑制二极管pesd15vl2bt的第三管连接adc1_gnd,隔离变送器t5555p的sout
‑
管脚连接adc1_gnd,隔离变送器t5555p的pout+管脚分别连接电容c45的一端和三端稳压芯片lm78l09的vi+管脚,三端稳压芯片lm78l09的vo+ 管脚分别连接电容c42的一端、瞬态抑制二极管smbj15a
‑
tr的负极和adc1_vcc,隔离变送器t5555p的pout
‑
管脚分别连接电容c45的另一端、三端稳压芯片lm78l09的gnd管脚、电容c42的另一端和adc1_gnd,adc1_gnd通过电阻r84分别连接ad转换芯片 ad8552的第二管脚、电阻r82的一端,电阻r82的另一端分别连接电阻r83的一端和ad 转换芯片ad8552的第一管脚,r83的另一端分别连接adc3_in和电容c44的一端,电容 c44的另一端连接adc1_gnd,ad转换芯片ad8552的第八管脚分别连接5v电源和接 adc1_gnd电容c43,ad转换芯片ad8552的第四管脚接adc1_gnd,ad转换芯片ad8552 的第三管脚分别连接adc1_out电阻r79、接adc1_gnd电阻r80和第二双向二极管 bav99的第三管脚,第二双向二极管bav99的第二管脚连接5v电源,第二双向二极管bav99 第一管脚连接adc1_gnd。
7.而且,所述磁力仪绞车包括绞车控制器、转速测量模块、制动驱动器、变频驱动器、收放卷筒、减速电机排缆绳装置、转向轮、张力感应器、锁紧机构和引导口,其中绞车控制器通过电滑环连接张力传感器,绞车控制器分别连接锁紧机构、转速测量模块、制动驱动器和变频驱动器,制动驱动器连接减速电机中的制动器,变频驱动器连接减速电机中的驱动电机,制动器连接收放卷筒,张力传感器固定在转向轮上,转向轮中磁力仪线缆出口处设有引导口,引导口出设有锁紧机构。
8.一种用于海洋测量无人艇自动收放磁力仪系统的控制方法,包括以下步骤:
9.步骤1、进入主程序;
10.步骤2、定义主程序中常量和变量,并将其初始化;
11.步骤3、声明并定义控制单元中各个模块的功能;
12.步骤4、初始化arm;
13.步骤5、使能timer、ad和串口设备的中断;
14.步骤6、等待中断,并判断是哪个设备进行了中断;
15.步骤7、若timer中断,则进行步骤8;若串口接收中断,则进行步骤9;若ad中断,则进行步骤10;
16.步骤8、timer中断处理函数,得到时间标志位,用于定时采集舵角,定时解析串口指令;
17.步骤9、串口中断处理函数,接收光纤罗经,北斗,探测仪,gps,无人艇主控单元,磁力仪绞车发送过来的状态及位置信息;
18.步骤10、ad中断处理函数,得到舵角信息;
19.步骤11、磁力仪控制单元根据舵角信息,光纤罗经,探测仪等状态及位置信息给出控制决策;
20.步骤12、磁力仪控制单元控制指令经422串口发送给磁力仪绞车执行。
21.而且,所述步骤9中串口中断处理函数的具体实现方法为:控制单元通过串口接收gps、北斗设备、光纤罗经、测深仪和舵角传感器输出海洋测量无人艇的位置信息、航速信
息、航向信息和实时航行水深信息,以此来决策磁力仪自动收放动作。
22.而且,所述决策磁力仪自动收放动作的具体实现方法为:读取前一次和后一次测量的海洋测量无人艇位置信息、航速信息、航向信息和实时航行水深信息,两次进行对比,数据发生突变时,则给自动收放绞车发送快速收磁力的指令,绞车收到指令信息后执行磁力仪快速回收,同时监控磁力仪收放过程中的绞车运行状态、收放缆绳的长度、收放缆绳的速度和缆绳的张力值。
23.本发明的优点和积极效果是:
24.1、本发明通过gps、北斗设备、光纤罗经、测深仪和舵角传感器来实时采集海洋测量无人艇的位置信息、航速信息、航向信息和实时航行水深信息,以此来决策磁力仪自动收放动作,解决因海洋测量无人艇的航速突变、航向突变及测量作业水域水深突变、海洋测量无人艇通信中断而导致磁力仪设备发生扎入海底泥层、碰撞航标、碰撞渔网等事故造成磁力仪损坏的问题,同时减少岸基或母船操控中心工作人员的人工操作干预次数,提高海洋测量无人艇工作效率。
25.2、本发明的磁力仪自动收放系统通过串口实时读取无人艇上的gps、北斗设备、光纤罗经输出无人艇的定位信息、航向信息、航速信息,根据实时的定位信息、航向信息、航速信息来决策磁力仪设备的收放,同时通过串口监控磁力仪收放绞车的运行状态、收放缆绳的长度、收放缆绳的速度、缆绳的张力值等。本发明解决了当海洋测量无人艇的gps、北斗设备、光纤罗经出现定位信息丢失或无线通信发生中断时,测量无人艇会则紧急停船,航速发生突变,航速突然降小,此时磁力仪设备因为惯性而继续滑行,容易造成磁力仪设备下沉而扎入海底泥层中,造成磁力仪设备损坏的问题。以及当海洋测量无人艇的航向发生大角度变化时,此时无人艇拖着磁力仪进行大角度转向,容易造成磁力仪与附近的航标、船舶、渔网等发生碰撞,造成磁力仪设备损害的问题,避免损害昂贵的磁力设备,且提高磁力仪测量试验效率。
26.3、本发明磁力仪自动收放系统通过实时读取无人艇上的测深仪设备输出无人艇实时试验海域水深信息,根据实时的水深信息来决策磁力仪设备的收放。海洋地形地貌复杂多变,解决了当磁力测量试验海域的水深突变浅时,容易发生磁力仪设备与海底凸起的泥层或暗礁发生碰撞,造成磁力仪设备损坏的问题,本发明能够自动收放磁力仪设备,避免损害昂贵的磁力设备,且提高磁力仪测量试验效率。
27.4、本发明用于海洋测量无人艇上,同时也可以应用在搭载磁力仪的有人大型海洋综合调查船上,适用于各种拖鱼式测量设备测量工作过程,确保拖鱼式测量设备安全,极大地提高测量工作效率。
附图说明
28.图1为本发明的装置结构图;
29.图2为本发明的控制单元结构图;
30.图3为本发明的舵角传感器电路图;
31.图4为本发明的磁力仪收放绞车结构图;
32.图5为本发明方法的流程图。
具体实施方式
33.以下结合附图对本发明做进一步详述。
34.一种用于海洋测量无人艇自动收放磁力仪的系统,如图1和图2所示,包括装置及其控制单元,所述装置包括收放绞车、磁力仪线缆、拖鱼支架、滑轮和磁力仪,所述收放绞车安装在无人艇上,拖鱼支架安装在无人艇船尾,收放绞车连接磁力仪线缆的一端,磁力仪线缆通过拖鱼支架连接磁力仪;控制单元包括无人艇主控制单元、自动收放磁力仪控制单元、磁力仪绞车、舵角传感器、gps、北斗设备、测深仪和光纤罗经,无人艇主控制单元和磁力仪绞车分别通过rs422与自动收放磁力仪控制单元双向连接,舵角传感器与自动收放磁力仪控制单元双线连接,用于传输采集到的信号,gps、北斗设备、测深仪和光纤罗经分别通过rs422 与自动收放磁力仪控制单元连接。
35.磁力仪线缆为磁力仪专用海洋电缆
‑
凯夫拉线缆。当需要开始进行磁力测量试验时,绞车转动放长凯夫拉线缆,磁力仪在拖鱼支架下放至水中,继续放长凯夫拉线缆,磁力仪沉入海面下,且被测量无人艇拖曳航行模式进行海洋磁力测量试验。
36.系统通过3路rs422串口分别与gps、北斗设备、光纤罗经连接,实时采集海洋测量无人艇的位置信息、航速信息、航向信息。通过1路rs422串口与磁力仪收放绞车连接,读取绞车的收放状态、收放缆绳长度、缆绳的张力值、收放缆绳速度等信息,舵角传感器作为实时航向测量的补充,航向出现较大幅度突变时,磁力仪自动收放系统快速回收磁力仪设备,避免出现磁力仪设备损坏。同时系统通过1路rs422串口将信息上传至无人艇主控制单元,无人艇主控制单元通过数传电台传输,最终显示在岸基监控中心。本发明重点解决因海洋测量无人艇的航速突变、航向突变及测量作业水域水深突变、海洋测量无人艇通信中断而导致磁力仪设备发生扎入海底泥层、碰撞航标和碰撞渔网等事故造成磁力仪损坏的问题,同时减少岸基或母船操控中心工作人员的人工操作干预次数,提高海洋测量无人艇工作效率。当海洋测量无人艇前往指定海域进行磁力信息测量时,试验工作人员提前设置好开始磁力仪试验应具备的海洋水深信息及测量无人艇航速信息,条件具备时自动释放磁力仪设备开始进行海洋磁力测量试验,保障磁力仪设备安全,减少人工操作次数,提高试验效率。
37.如图3所示,舵角传感器包括第一双向二极管bav99、第二双向二极管bav99、第一静电抑制二极管pesd15vl2bt、第二静电抑制二极管pesd15vl2bt、隔离变送器t5555p、三端稳压芯片lm78l09、ad转换芯片ad8552、瞬态抑制二极管smbj15a
‑
tr、电阻r79、电阻r80、电阻r82、电阻r83、电阻r84、电容c42、电容c43、电容c44和电容c45,其中,隔离变送器t5555p的pin+管脚连接12v电源,隔离变送器t5555p的pin
‑
管脚接地, adc1_in分别连接第一双向二极管bav99的第三管脚、第一静电抑制二极管pesd15vl2bt 的第二管脚和隔离变送器t5555p的sin+管脚,第一双向二极管bav99的第一管脚连接 adc1_gnd,第一双向二极管bav99的第二管脚连接adc1_vcc,第一静电抑制二极管 pesd15vl2bt的第三管脚连接adc1_gnd,隔离变送器t5555p的sin
‑
管脚连接 adc1_gnd,隔离变送器t5555p的sout+管脚分别连接第二静电抑制二极管pesd15vl2bt 的第一管脚和adc1_out,第二静电抑制二极管pesd15vl2bt的第三管连接adc1_gnd,隔离变送器t5555p的sout
‑
管脚连接adc1_gnd,隔离变送器t5555p的pout+管脚分别连接电容c45的一端和三端稳压芯片lm78l09的vi+管脚,三端稳压芯片lm78l09的vo+ 管脚分别连接电容c42的一端、瞬态抑制二极管smbj15a
‑
tr的负极和adc1_vcc,隔离变送器t5555p的pout
‑
管脚分别连接电容c45的另一端、三端稳压芯片
lm78l09的gnd管脚、电容c42的另一端和adc1_gnd,adc1_gnd通过电阻r84分别连接ad转换芯片 ad8552的第二管脚、电阻r82的一端,电阻r82的另一端分别连接电阻r83的一端和ad 转换芯片ad8552的第一管脚,r83的另一端分别连接adc3_in和电容c44的一端,电容 c44的另一端连接adc1_gnd,ad转换芯片ad8552的第八管脚分别连接5v电源和接 adc1_gnd电容c43,ad转换芯片ad8552的第四管脚接adc1_gnd,ad转换芯片ad8552 的第三管脚分别连接adc1_out电阻r79、接adc1_gnd电阻r80和第二双向二极管 bav99的第三管脚,第二双向二极管bav99的第二管脚连接5v电源,第二双向二极管bav99 第一管脚连接adc1_gnd。
38.磁力仪收放系统的硬件采用stm32f767芯片,adc1_in采集进来的模拟信号传输到隔离变送器t5555p的11管脚(sin+),由隔离变送器t5555p的11管脚3管脚(sout)输出给 ad转换芯片ad8552。经过ad转换后将信号传输至stm32f767芯片的pf3引脚。3路rs422 用于数据采集板卡与数据分发板卡之间进行数据通讯。
39.如图4所示,磁力仪收放绞车包括绞车控制器、转速测量模块、制动驱动器、变频驱动器、收放卷筒、减速电机排缆绳装置、转向轮、张力感应器、锁紧机构和引导口,其中绞车控制器通过电滑环连接张力传感器,绞车控制器分别连接锁紧机构、转速测量模块、制动驱动器和变频驱动器,制动驱动器连接减速电机中的制动器,变频驱动器连接减速电机中的驱动电机,制动器连接收放卷筒,张力传感器固定在转向轮上,转向轮中磁力仪线缆出口处设有引导口,引导口出设有锁紧机构。
40.绞车控制部分采用变频驱动,制动驱动器控制绞车电机带动收放卷筒实现缆绳的收放动作,采用张力传感器测量收放缆绳过程中缆绳的张力值,采用转速测量部分测量绞车内部电机的转速,来得知收放缆绳的速度。具备动态环境自适应控制、高速低载快放等特点,达到无人自动作业绞车的安全可靠收放效果。绞车采用“自由轮”方案,在释放过程中卷筒与电机脱离,缆在磁力仪及拖鱼收放装置的作用力下自由转动,当磁力仪及拖鱼收放装置的作用力不够时,卷筒停止转动,保证放缆安全,从而保障收放过程磁力仪安全。
41.一种用于海洋测量无人艇自动收放磁力仪系统的控制方法,如图5所示,包括以下步骤:
42.步骤1、进入主程序;
43.步骤2、定义主程序中常量和变量,并将其初始化;
44.步骤3、声明并定义控制单元中各个模块的功能;
45.步骤4、初始化arm;
46.步骤5、使能timer、ad和串口设备的中断;
47.步骤6、等待中断,并判断是哪个设备进行了中断;
48.步骤7、若定时器3中断,则进行步骤8;若串口接收中断,则进行步骤9;若ad中断,则进行步骤10;
49.步骤8、定时器3中断处理函数,得到时间标志位,用于定时采集舵角,定时解析串口指令;
50.步骤9、串口中断处理函数,接收光纤罗经,北斗,探测仪,gps,无人艇主控单元,磁力仪绞车发送过来的状态及位置信息;
51.步骤10、ad中断处理函数,得到舵角信息;
52.步骤11、磁力仪控制单元根据舵角信息,光纤罗经,探测仪等状态及位置信息给出
控制决策;
53.步骤12、磁力仪控制单元控制指令经422串口发送给磁力仪绞车执行。
54.串口中断处理函数的具体实现方法为:控制单元通过串口接收gps、北斗设备、光纤罗经、测深仪和舵角传感器输出海洋测量无人艇的位置信息、航速信息、航向信息和实时航行水深信息,以此来决策磁力仪自动收放动作。
55.决策磁力仪自动收放动作的具体实现方法为:读取前一次和后一次测量的海洋测量无人艇位置信息、航速信息、航向信息和实时航行水深信息,多次进行数据对比,数据发生突变时,则给自动收放绞车发送快速收磁力的指令,绞车收到指令信息后执行磁力仪快速回收,同时监控磁力仪收放过程中的绞车运行状态、收放缆绳的长度、收放缆绳的速度和缆绳的张力值。
56.需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明包括并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1