基于信号结构信息的窄带雷达目标检测方法
1.本发明属于通信技术领域,更进一步涉及窄带雷达目标检测方法,可用于情报雷达、预警雷达中不同信噪比目标的检测。
背景技术:
2.窄带雷达应用中目标检测的主要任务是,决定窄带雷达各个检测单元的回波是否源于目标。随着人们对窄带雷达通信领域的不断深入了解,目标检测在该领域得到广泛的应用和发展,目前已有大量算法来实现目标检测。但是由于回波信号的结构信息难以使用解析的模型刻画,因而现有方法大多仅基于各个检测单元的幅度信息,由此造成的信息利用不充分使得目标检测面临性能损失。
3.电子科技大学在专利申请号为202011196999.3,申请公开号为cn112327285a的专利申请中提出了“一种扫描雷达的目标检测方法”,该方法首先运用反卷积技术对获取的实波束图像进行超分辨处理,并对超分辨结果进行滑窗预处理操作;再利用预处理结果的低秩特性和感兴趣目标的稀疏特性,构建目标函数,将稀疏目标检测问题转换为矩阵低秩稀疏分解的优化问题;然后通过对目标函数迭代求解,最终实现稀疏目标的检测。该方法由于其使用的超分辨算法对目标的信噪比要求较高,因而针对低信噪比目标的检测概率会发生下降。
4.南京理工大学在专利申请号为202010994601.4,申请公开号为cn111913158a的专利申请中提出了“复杂杂波背景下检测低慢小目标的雷达信号处理方法”。该方法首先对采样的动目标回波脉冲序列的每一距离单元内的慢时间数据序列进行谱分析获得多普勒域数据;再对多普勒域数据进行滑窗处理且获取每个参考窗中统计方差、统计均值,以及前后两个参考窗的统计均值比,并根据统计方差和统计均值判断每个参考窗内背景杂波的均匀性,根据背景杂波的均匀性选择对应的恒虚警检测算法获取参考窗内目标点迹;最终根据点迹信息获取目标的速度、俯仰、方位、距离。该方法由于在检测过程中仅使用了回波的幅度信息,并未考虑回波信号结构信息的利用,这种对已有信息的不充分利用会引起性能损失,进而造成检测概率下降。
技术实现要素:
5.本发明的目的在于针对上述现有技术的不足,提出一种基于信号结构信息的窄带雷达目标检测方法,以提高目标的检测概率。
6.实现本发明目的的技术方案如下:
7.1.一种基于信号结构信息的窄带雷达目标检测方法,其特征在于,包括:
8.(1)构建训练数据集:
9.(1a)计算窄带雷达场景中目标回波结构信息在距离维覆盖的检测单元数量n
s
;
10.(1b)分别获取目标存在和不存在时窄带雷达接收的回波信号;
11.(1c)根据目标存在时窄带雷达接收的回波信号和检测单元数量n
s
,构造正样本数
据集
12.(1d)根据目标不存在时窄带雷达接收的回波信号和检测单元数量n
s
,构造负样本数据集
13.(1e)将数量相同的正样本数据集和负样本数据集组成训练数据集;
14.(2)构建一个依次由输入编码层、隐藏层和输出解码层组成的全卷积深度神经网络,并将交叉熵损失函数作为该网络的代价函数j(θ);
15.(3)根据训练数据集和代价函数j(θ),使用最小批梯度下降法对全卷积神经网络进行训练,得到训练好的全卷积神经网络;
16.(4)窄带雷达目标检测:
17.(4a)获取窄带雷达回波数据并进行脉冲压缩和相干积累处理;
18.(4b)以各个检测单元为中心,提取大小为n
s
×
n
s
的矩阵涵盖的回波信号,组成针对各个待检测单元的回波信号矩阵,并对其取模值;
19.(4c)将回波信号矩阵的模值输入训练好的全卷积神经网络,得到各个检测单元内目标存在的概率λ
n
;
20.(4)根据雷达期望的虚警概率p和负样本数据使用蒙特卡罗方法计算检测门限γ,将目标存在的概率λ
n
与检测门限γ进行对比,完成对目标的检测:
21.当λ
n
≥γ时,则目标存在,
22.否则,目标不存在。
23.本发明与现有的技术相比具有以下优点:
24.第一,由于本发明在目标检测所使用的信息中涵盖了目标回波信号的结构信息,克服了现有技术中仅利用幅度信息进行目标检测,未充分利用回波信息造成的检测性能损失问题,使得本发明能够更有效地应用于窄带雷达目标的检测。
25.第二,由于本发明构建了全卷积神经网络,克服了现有技术中采用模型驱动的方法无法有效提取信号结构信息的缺陷,使得本发明能够通过数据驱动的方式提取回波信号的结构信息,提高了窄带目标的检测性能。
附图说明
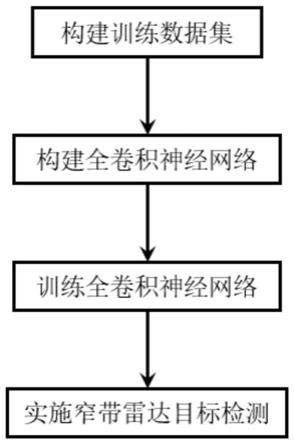
26.图1为本发明的实现流程图;
27.图2为本发明中全卷积神经网络的结构示意图;
28.图3为本发明的仿真结果图。
具体实施方式
29.以下结合附图对本发明的实施例和效果做进一步详细描述。
30.参照图1,本实施例的实现步骤包括如下:
31.本实施例是针对窄带雷达中的目标进行检测,此时目标的尺寸小于雷达距离单元的大小,通过构建包含目标信号结构信息的训练数据集,训练全卷积神经网络,使其从数据中学习使用信号结构信息实施目标检测,提高不同信噪比目标的检测概率。
32.步骤1,构建训练数据集。
33.1.1)根据窄带雷达的采样频率f
s
和窄带雷达发射信号的带宽b,计算窄带雷达场景中目标回波结构信息在距离维覆盖的检测单元数量n
s
:
[0034][0035]
其中,表示向上取整操作;
[0036]
1.2)针对已知目标位置的窄带雷达观测场景中,根据目标存在时窄带雷达接收的回波信号和检测单元数量n
s
,按照如下方式构造正样本数据集:
[0037]
1.2.1)对目标存在时窄带雷达接收的回波信号,依次进行脉冲压缩和相干积累处理,获得有目标存在的距离多普勒矩阵;
[0038]
1.2.2)计算目标所在的距离单元和多普勒通道;
[0039]
1.2.3)从有目标存在的距离多普勒矩阵中,以目标所在距离单元和多普勒通道为中心,提取出大小为n
s
×
n
s
的矩阵所涵盖的区域回波,并对其取模值;
[0040]
1.2.4)将取模值的回波信号矩阵作为正样本数据;
[0041]
1.2.5)重复步骤1.2.1)
‑
1.2.4),得到正样本数据集
[0042]
1.3)当窄带雷达观测场景中不存在目标时,根据窄带雷达接收的回波信号和检测单元数量n
s
,按照如下方式构造负样本数据集
[0043]
1.3.1)将目标不存在时窄带雷达接收的回波信号,依次经过脉冲压缩和相干积累处理,获得无目标存在的距离多普勒矩阵;
[0044]
1.3.2)从无目标存在的距离多普勒矩阵中,随机地采集相邻距离单元和相邻多普勒单元回波,组成大小为n
s
×
n
s
的回波信号矩阵,并对其取模值;
[0045]
1.3.3)将取模值的回波信号矩阵作为负样本数据;
[0046]
1.3.4)重复步骤1.4.1)
‑
1.4.3),得到负样本数据集
[0047]
1.4)用数量相同的正样本数据集和负样本数据集组成训练数据集;
[0048]
步骤2,构建全卷积神经网络。
[0049]
2.1)构建一个依次由输入编码层、隐藏层和输出解码层组成的全卷积深度神经网络,其中:
[0050]
所述输入编码层,采用卷积核大小为3
×
3,通道数为32的卷积层;
[0051]
所述隐藏层,由6个卷积层依次连接组成,其中:
[0052]
第1卷积层的通道数为32、卷积核大小为3
×
3;
[0053]
第2卷积层是通道数为64、卷积核大小为3
×
3;
[0054]
第3卷积层是通道数为64、卷积核大小为3
×
3;
[0055]
第4卷积层是通道数为128、卷积核大小为3
×
3;
[0056]
第5卷积层是通道数为128、卷积核大小为1
×
1;
[0057]
第6卷积层是通道数为128、卷积核大小为1
×
1;
[0058]
所述输出解码层,采用通道数为1、卷积核大小为1
×
1的卷积层;
[0059]
2.2)设置该全卷积神经网络代价函数为交叉熵损失函数j(θ),其表示如下:
[0060][0061]
其中,θ表示全卷积神经网络中连接每一层网络的参数,其在训练全卷积神经网络的过程中随着代价函数趋于不变而趋于最优,n表示训练数据集中数据的数量,表示数据的序号,表示将第个训练数据输入全卷积神经网络时期望获得的输出,表示将第个数据输入全卷积神经网络时获得的真实输出;
[0062]
步骤3,训练全卷积神经网络。
[0063]
3.1)根据训练数据集和代价函数j(θ),使用最小批梯度下降法对全卷积神经网络进行训练,训练方式如下:
[0064]
3.1.1)设定最小批梯度下降法批的大小m和网络参数更新步长η;
[0065]
3.1.2)从训练数据集中随机选取大小为m的数据,送入全卷积神经网络并计算相应的代价函数j(θ);
[0066]
3.1.3)计算当前全卷积神经网络代价函数j(θ)关于网络参数θ的梯度g;
[0067]
3.1.4)将全卷积神经网络的参数θ更新为θ
‑
ηg;
[0068]
3.1.5)重复3.1.1)
‑
3.1.4),直到全卷积神经网络的代价函数j(θ)趋于不变,得到训练好的全卷积神经网络;
[0069]
步骤4,实施窄带雷达目标检测。
[0070]
4.1)获取窄带雷达回波数据并依次进行脉冲压缩和相干积累处理,得到距离多普勒矩阵;
[0071]
4.2)在距离多普勒矩阵中,以各个检测单元为中心,提取大小为n
s
×
n
s
的矩阵涵盖的回波信号,组成针对各个待检测单元的回波信号矩阵,并对其取模值;
[0072]
4.3)将回波信号矩阵的模值输入训练好的全卷积神经网络,得到各个检测单元内目标存在的概率λ
n
;
[0073]
4.4)根据雷达期望的虚警概率p和负样本数据按照如下步骤使用蒙特卡罗方法计算检测门限γ:
[0074]
4.4.1)将负样本数据集中的数据输入全卷积神经网络得到相应的输出λ
m
,m=1,2,...,n
e
,其中m表示负样本的序号,n
e
表示负样本数据的数量;
[0075]
4.4.2)将已知雷达期望的虚警概率p和4.4.1)得到的全卷积神经网络的输出λ
m
代入到下式计算得到检测门限γ:
[0076][0077]
其中,表示示性函数,当b≥a时其值为1,否则其值为0;
[0078]
4.5)将目标存在的概率λ
n
与检测门限γ进行对比,完成对目标的检测:
[0079]
若λ
n
≥γ,则目标存在,
[0080]
否则,目标不存在。
[0081]
下面结合仿真实验对本发明的效果做进一步说明。
[0082]
1.仿真实验条件:
[0083]
本发明仿真实验的硬件测试平台是:处理器为cpu xeon e5
‑
2643,主频为3.4ghz,内存64gb;软件平台为:ubuntu 18.04lts,64位操作系统,python 2.7。
[0084]
本发明的仿真实验中设定的雷达系统工作在s波段,其发射的探测信号是带宽为5mhz的线性调频信号。训练和测试场景中均假设目标的散射中心随机分布在20m
×
8m的区域。
[0085]
假设目标的回波服从于swerling i型分布,检测过程中遇到的噪声假设为接收机的内噪声,是服从复高斯分布的白噪声。
[0086]
仿真目标的信噪比为3~30db,目标回波幅度服从于swerling i型分布。
[0087]
2.仿真内容及仿真结果分析:
[0088]
在上述仿真条件下,分别用本发明和传统门限检测方法,在复高斯白噪声环境下对不同虚警概率的目标进行检测1000次,得到信噪比在3~30db范围内的目标检测概率,结果如图3,其中:
[0089]
图3(a)是雷达期望的虚警概率为p=10
‑4时,两种方法在信噪比为3~30db范围内的目标的检测概率;
[0090]
图3(b)是雷达期望的虚警概率为p=10
‑5时,两种方法在信噪比为3~30db范围内的目标的检测概率;
[0091]
图3(c)是雷达期望的虚警概率为p=10
‑6时,两种方法在信噪比为3~30db范围内的目标的检测概率;
[0092]
从图3可以看出,本发明对不同虚警概率,且对3~30db的不同信噪比目标,均其检测概率比传统门限检测方法更高,表明本发明能适用于不同信噪比目标的检测,且能够获得更高的检测概率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1