一种陀螺仪系统测试用漂移解算分析方法与流程
1.本发明属于陀螺仪技术领域,尤其是一种陀螺仪系统测试用漂移解算分析方法。
背景技术:
2.陀螺仪作为惯导系统最核心的元件,系统测试是陀螺仪在系统应用环境下更为真实的性能反映,是决定陀螺仪可用性和等级划分的重要依据。其精度性能在很大程度上决定了惯导系统的精度性能。陀螺仪在装机或交付前需要进行单机、系统测试检验,单机测试与系统测试各有侧重,两者结合能对陀螺仪进行更为全面的评价。陀螺仪上惯导系统测试反映的是陀螺仪在惯导系统上的综合表现,也是陀螺仪在系统应用环境下更为真实的性能反映,在很大程度上决定了陀螺仪的等级划分及用途。
3.该项工作需要一定的技术基础,通常由技术人员亲自观察、解读测试数据,对陀螺仪性能进行评定。陀螺仪系统测试对调试人员技术要求高、耗费技术人员大量的人力物力,但不同人员的解读结果存在较大差异,缺乏统一的标准。
4.随着我所陀螺仪的的种类、数量逐年增加,陀螺仪系统测试试验人员不足成为摆在我们眼前急需解决的问题,因此如何研发出一种陀螺仪系统的漂移解算分析方法是本领域技术人员亟待解决的技术难题。
技术实现要素:
5.本发明的目的在于克服现有技术的不足,提出一种陀螺仪系统测试用漂移解算分析方法,减小了陀螺漂移的误判率,降低了用工成本,提高了工作效率。
6.本发明解决其现实问题是采取以下技术方案实现的:
7.一种陀螺仪系统测试用漂移解算分析方法,包括以下步骤:
8.步骤1、采集惯导系统数据;
9.步骤2、根据步骤1所采集的数据解算水平陀螺漂移、方位陀螺的漂移、斜漂、常值漂移和随机漂移;
10.步骤3、将步骤2中解算陀螺漂移结果在界面显示并同步绘制陀螺漂移曲线图;
11.步骤4、陀螺系统测试结束,根据测漂结果,生成陀螺仪系统测试结果。
12.而且,所述步骤1采集的惯导系统数据包括:lo、la、ve、vn、vz、r、p、hp;
13.而且,所述步骤2的具体步骤包括:
14.(1)水平陀螺漂移解算:
15.在试验室静态下,根据水平阻尼系统误差关系估算两个水平陀螺的漂移:
[0016][0017][0018]
式中,δv
x
、δv
y
为系统速度误差,静态下就是系统速度,为系统纬度误差,试验室条件下也是已知的;
[0019]
γ为航向误差,静态下就是系统当前航向h
i
减去最后一次校准后的初始航向h0,
[0020]
γ=h
i
‑
h0ꢀꢀ
(3)
[0021]
如果不是静态测试还需要外参考信息才能估算两个水平陀螺漂移。
[0022]
(2)方位陀螺漂移解算:
[0023]
24小时静态阶段解算方位陀螺漂移有以下两种方法:
[0024]
方法一:采用kalman滤波的方法进行估计,根据惯导系统误差方程建立状态方程和观测方程,以位置和速度信息为观测量,试验室条件下知道准确的位置信息和速度信息;
[0025]
方法二:采用gps校的方法估算方位陀螺漂移;
[0026]
(3)斜漂和常值漂移估算:
[0027]
将估算的方位陀螺漂移用最小二乘法拟合;
[0028]
最小二乘法一次曲线拟合公式如下:
[0029]
i(j)=j
·
t
s
+t0,j=1,2,...n,t
s
为时间间隔,
[0030][0031][0032]
或(单位为度/小时),
[0033][0034][0035]
则斜漂为
[0036][0037]
常值漂移为
[0038][0039]
(4)随机漂移的标准差计算:
[0040]
假设估算出的东向陀螺漂移为对应时间为t_ex,拟合出的斜率为常值漂移为拟合曲线为则随机漂移标准差为
[0041][0042]
其中,水平陀螺漂移对应时间起点是零,时间间隔为10秒,方位陀螺漂移对应时间t_zx起点是2小时,时间间隔为10秒。
[0043]
而且,所述步骤2第(2)步的24小时静态阶段解算方位陀螺漂移的方法一的具体方法为:
[0044]
根据惯导系统误差关系建立系统的状态方程
[0045][0046]
和量测方程
[0047]
z(t)=hx(t)+v(t)
[0048]
状态变量取15维矢量,
[0049][0050]
测量值z(t)是位置误差和速度误差、速度误差和航向变化量,
[0051]
将连续方程离散化,根据ka lman滤波基本方程估算方位陀螺漂移:
[0052][0053][0054][0055][0056][0057]
得到方位陀螺常值漂移估计值
[0058]
而且,所述步骤2第(2)步的24小时静态阶段解算方位陀螺漂移的方法二的具体方法为:
[0059]
记t0、t1、t2为三个时刻,它们的间隔为t1=t2=3600s;
[0060]
在这三个时刻分别采集和保存:
[0061][0062][0063][0064]
试验室静态下
[0065][0066]
其中:
[0067][0068]
δλ(
·
)=λ
ins
‑
λ
gps
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0069]
γ(
·
)=hp
‑
h0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0070]
分别为纬度误差、经度误差、航向误差;
[0071]
利用保存的信息计算
[0072]
[0073][0074][0075][0076][0077][0078][0079][0080]
最后解出北向和方位陀螺漂移:
[0081][0082]
本发明的优点和有益效果:
[0083]
1、本发明提供一种陀螺仪系统测试用漂移解算分析方法,能自动完成惯导系统数据的采集、储存、解算、绘图并形成系统调试记录、陀螺仪测试报告,还能辅助技术人员进行数据分析、绘图分析及故障排查。本发明已大量应用于各型陀螺仪的系统测试验收,取得了良好效果。规范了系统测试流程、评判标准,减小了陀螺漂移的误判率。降低了对调试人员技术要求,解放了大量的技术人员,降低了用工成本,提高了工作效率。取得了很好的经济效益、社会效益。
[0084]
2、本发明的陀螺仪系统测试用漂移解算分析方法实现了陀螺仪的系统级自动测试,不仅可以降低对调试人员技术水平要求,规范测试流程以及评判标准,还可以提高工作效率,向生产环节要效率,降低用工成本,充分解放技术人员,挖掘企业自身潜力。
附图说明
[0085]
图1是本发明的水平陀螺仪解算漂移曲线图;
[0086]
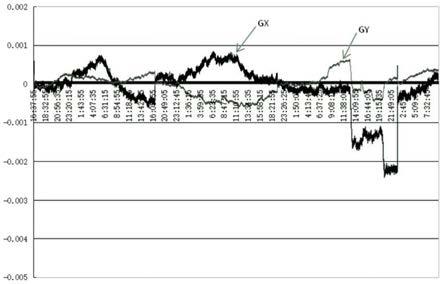
图2是本发明的方位陀螺仪解算漂移曲线图;
[0087]
图3是本发明的三个陀螺仪解算漂移曲线图。
具体实施方式
[0088]
以下结合附图对本发明实施例作进一步详述:
[0089]
一种陀螺仪系统测试用漂移解算分析方法,包括以下步骤:
[0090]
步骤1、采集惯导系统数据(lo、la、ve、vn、vz、r、p、hp)。
[0091]
步骤2、根据步骤1所采集的数据解算水平陀螺漂移、方位陀螺的漂移、斜漂、常值漂移和随机漂移;
[0092]
所述步骤2的具体步骤包括:
[0093]
(1)水平陀螺漂移解算:
[0094]
在试验室静态下,根据水平阻尼系统误差关系估算两个水平陀螺的漂移:
[0095][0096][0097]
式中,δv
x
、δv
y
为系统速度误差,静态下就是系统速度,为系统纬度误差,试验室条件下也是已知的;
[0098]
γ为航向误差,静态下就是系统当前航向h
i
减去最后一次校准后的初始航向h0,
[0099]
γ=h
i
‑
h0ꢀꢀ
(3)
[0100]
如果不是静态测试还需要外参考信息才能估算两个水平陀螺漂移。
[0101]
估算的水平陀螺漂移每五分钟记录到本实施例的文件2中。
[0102]
(2)方位陀螺漂移解算:
[0103]
24小时静态阶段解算方位陀螺漂移有以下两种方法:
[0104]
方法一:采用kalman滤波的方法进行估计,根据惯导系统误差方程建立状态方程和观测方程,以位置和速度信息为观测量,试验室条件下知道准确的位置信息和速度信息(速度为零);
[0105]
方法二:采用gps校的方法估算方位陀螺漂移;
[0106]
其中,方法一的具体方法为:
[0107]
根据惯导系统误差关系建立系统的状态方程
[0108][0109]
和量测方程
[0110]
z(t)=hx(t)+v(t)
[0111]
状态变量取15维矢量,
[0112][0113]
测量值z(t)是位置误差和速度误差、速度误差和航向变化量,
[0114]
在本实施例中,由于是试验室静态,因此准确位置信息是已知的,并且真实速度为
零,系统速度即为系统速度误差;
[0115]
将连续方程离散化,根据ka l man滤波基本方程估算方位陀螺漂移:
[0116][0117][0118][0119][0120][0121]
得到方位陀螺常值漂移估计值
[0122]
其中,方法二的具体方法为:
[0123]
记t0、t1、t2为三个时刻,它们的间隔为t1=t2=3600s(测试软件中时间间隔取半小时)
[0124]
在这三个时刻分别采集和保存:
[0125][0126][0127][0128]
试验室静态下
[0129][0130]
其中:
[0131][0132]
δλ(
·
)=λ
ins
‑
λ
gps
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0133]
γ(
·
)=hp
‑
h0ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0134]
分别为纬度误差、经度误差、航向误差;
[0135]
利用保存的信息计算
[0136][0137]
[0138][0139][0140][0141][0142][0143][0144]
最后解出北向和方位陀螺漂移:
[0145][0146]
在本实施例中,理论上两种算法估算的陀螺常值漂移是一致的,但是由于陀螺可能有慢变、存在斜漂或随机漂移,算法基于的陀螺模型不会十分准确,这可能会造成两种算法结果有些差距。实际系统上发现gps校算法估算的方位陀螺漂移波动较大,还需要后期试验继续观察。
[0147]
(3)斜漂和常值漂移估算:
[0148]
将估算的方位陀螺漂移用最小二乘法拟合。
[0149]
最小二乘法一次曲线拟合公式如下:
[0150]
i(j)=j
·
t
s
+t0,j=1,2,...n,t
s
为时间间隔,
[0151][0152][0153]
或(单位为度/小时),
[0154][0155][0156]
则斜漂为
[0157][0158]
常值漂移为
[0159][0160]
(4)随机漂移的标准差计算:
[0161]
在本实施例中,以东向陀螺为例,假设估算出的东向陀螺漂移为对应时间为t_ex,拟合出的斜率为常值漂移为拟合曲线为则随机漂移标准差为
[0162][0163]
其中,水平陀螺漂移对应时间起点是零,时间间隔为10秒,方位陀螺漂移对应时间t_zx起点是2小时,时间间隔为10秒。
[0164]
步骤3、将步骤2中解算陀螺漂移结果在界面显示并同步绘制陀螺漂移曲线图;
[0165]
在本实施例中,图1为惯导系统某一次开关机过程陀螺仪测试设备估算水平陀螺仪漂移曲线图,包括两个24h静态航次及一个变艏向航次,通过后期的数据分析与处理,该曲线很好得反映了陀螺仪漂移的真实变化,测漂结果准确,通过曲线反映陀螺漂移变化非常直观。
[0166]
在本实施例中,图2为惯导系统某一次开关机过程陀螺仪测试设备估算方位陀螺仪漂移曲线图,包括两个24h静态航次及一个变艏向航次,通过后期的数据分析与处理,该曲线很好得反映了陀螺仪漂移的真实变化,测漂结果准确,通过曲线反映陀螺漂移变化非常直观。
[0167]
在本实施例中,图3为某一个静态航次陀螺仪测试设备解算东向、北向、方位陀螺仪的漂移曲线图,不规则曲线为解算陀螺漂移,虚线是用最小二乘法拟合出来的斜漂曲线,通过后期的数据分析与处理,该曲线很好得反映了陀螺仪漂移的真实变化,测漂结果准确。
[0168]
步骤4、陀螺系统测试结束,根据测漂结果,生成陀螺仪系统测试结果。
[0169]
在本实施例中,可依据本发明提供的一种陀螺仪系统测试用漂移解算分析方法形成陀螺仪自动系统测试软件,该系统测试软件适用windows操作系统,需要安装vc软件;硬件需要配备rs422串口。本系统测试软件适用于lfg
‑
3d、lfg
‑
4b、lfg
‑
4c、msg
‑
1a、msg
‑
1b陀螺仪(以下简称陀螺仪)在试验室条件下的系统性能测试。
[0170]
该陀螺仪自动测试软件分为在线录取解算软件和离线分析软件。在线录取解算软
件是对惯导系统输出的数据进行录取、存储,并同步进行解算。离线分析软件是对在线软件录取解算的数据进行分析、汇总、绘图查看。
[0171]
陀螺仪自动测试在线录取解算软件采用vc进行编写开发,操作简单、界面友好。在线录取解算软件对惯导系统输出的导航数据和校准数据进行录取,将以上数据在界面上实时显示,并分类存储。根据惯导系统的误差关系编写相应的算法对以上信息进行解算,推算出ge、gn、gb陀螺仪的等效漂移并存储,并且在界面上同步显示,根据校准数据及推算陀螺漂移得到陀螺仪的相关测试数据。最终形成三个记录性文件,文件1(system文件)记录惯导系统导航数据(lo、la、ve、vn、vz、r、p、hp),文件2(check文件)记录惯导系统初始校准和gps校的校准数据以及测试软件估算的陀螺漂移(gam、
△
lo、
△
la、
△
ve、
△
vn、εx、εy、εz),文件3(陀螺仪文件)记录陀螺仪的各项指标数据(逐次启动漂移、陀螺稳定时间、航次累积漂移、随机漂移标准偏差、斜漂,跳数、突变、航向效应等)。每个陀螺仪对应唯一的陀螺仪文件,陀螺仪所有航次的测试数据都存储在该文件里,便于陀螺仪测试全周期的测试结果的查看。陀螺仪文件格式与质标处陀螺仪数据库的标准格式一致,这样陀螺仪文件就能直接作为质标处陀螺仪数据库进行存储。
[0172]
陀螺仪自动测试离线分析软件用vc进行编写开发,绘图调用matlab,界面友好,操作简单方便。离线分析软件读取在线软件存储的system文件及check文件,软件自动判断各阶段惯导所处状态,根据需要选择所需阶段的导航参数及陀螺漂移进行自由组合绘图查看,便于技术人员直观观察系统误差及漂移发散曲线及规律,辅助技术人员进行系统数据分析及发现系统可能存在的问题。对录取惯导数据进行提炼,记录各阶段的重要信息,一键式自动生成系统调试记录,便于查看及进行系统分析,完全代替目前由人工抄写调试记录,节约人力、物力。
[0173]
惯导系统出现性能、精度下降的故障在惯导系统故障中占据了很大比例,系统性能、精度下降往往都是一些软故障,需要维修人员具备很高的技术水平,根据惯导系统的输出的导航数据进行分析判断,逐渐分离出引起系统性能、精度下降的故障原因,再进行有针对性的修理。陀螺仪自动测试软件录取惯导系统数据,估算三个陀螺仪漂移,对导航参数及陀螺漂移绘图分析查看,辅助技术人员进行系统数据分析,特别是由于陀螺仪精度下降引起的系统精度下降,通过陀螺漂移曲线非常直观地就能反映出来,其它故障也能通过绘制导航参数及陀螺漂移曲线进行辅助分析。
[0174]
如下表所示,陀螺仪自动测试软件数据分三个文件进行存储。文件1存储惯导系统发送过来的导航数据,主要包括lo、la、ve、vn、vz、rol、pit、hp等信息,文件1存储数据格式见表1。文件2存储惯导系统的校准数据及测试软件的测漂数据,主要包括
△
hp、
△
lo、
△
la、
△
ve、
△
vn、gx、gy、gz、hp0等信息,文件2存储数据格式见表2。文件3存储陀螺仪指标数据,分初始对准、24h静态及变艏向三种状态分别存储,主要包括逐次启动漂移、启动时间、24h累计漂移、跳变、突变、斜漂、标准差、变艏向各位置漂移及24h时刻漂移等信息,文件3存储数据格式见表3。
[0175]
表1惯导系统导航数据存储格式(文件1)
[0176][0177]
表2惯导校准数据及测试软件估算漂移存储格式(文件2)
[0178][0179]
表3陀螺仪测试结果数据存储格式(文件3)
[0180][0181]
在本实施例中,该系统测试软件的工作流程为:
[0182]
本发明的系统测试软件在方案设计以及编写的时候,遵循自动化、人性化的原则,软件正常启动以后,除了操作人员查看统计参数和数据曲线等操作外,不须进行其他操作,软件自动识别惯导系统的各个工作阶段,并完成各阶段相应的工作。
[0183]
(1)启动软件:
[0184]
将串口线连接到计算机以后,就可以启动软件。首先打开主界面,点击系统初始化
→
选择数据文件夹,在弹出的窗口中选择数据文件的存储路径。然后,点击系统初始化
→
测试明细来填写测试的相关信息。最后通过系统初始化
→
打开串口,打开相应的串口。此时主界面中的状态指示灯显示软件默认的惯导工作阶段——初始对准阶段,后面的时间指的是当前状态的持续时间,状态转换后重新计时。
[0185]
需要注意的是:
[0186]
如果软件开启时,惯导系统的当前工作阶段不是软件默认的初始对准阶段,可以从系统控制
→
状态选择中选择系统的工作阶段,其中转艏向阶段由软件根据系统航向自行判断,不能在此菜单中选择;
[0187]
如果需要将数据记录到文件中,还需要选择系统控制
→
存储数据菜单。
[0188]
(2)初始校准阶段:
[0189]
软件启动以后,默认的工作阶段是初始对准阶段。在该阶段软件主要完成以下工作:
[0190]
录取惯导系统发送的系统数据;
[0191]
录取惯导系统发送的陀螺漂移数据和逐次启动漂移数据。
[0192]
(3)gps校阶段:
[0193]
三位置正常校、应急校结束后自动转gps校或者根据2a01命令判断进入gps校阶段。软件在该阶段主要完成以下工作:
[0194]
录取惯导系统发送的系统数据;
[0195]
录取由惯导系统gps校准求得的北向和方位陀螺漂移,并存储到数据文件;
[0196]
判断陀螺的稳定时间,并存储到数据文件。
[0197]
(4)24小时静态阶段
[0198]
软件根据2a00命令,和系统航向的变化小于设定值,判断进入24小时静态阶段,收到2a01命令,24小时静态阶段结束。该阶段软件需要完成以下工作:
[0199]
录取惯导系统发送的系统数据;
[0200]
根据录取的导航数据每10秒钟分别采用gps校的算法和滤波算法对方位陀螺漂移进行估算,水平陀螺漂移采用误差方程实时估算;
[0201]
24小时静态结束时计算常值漂移、斜漂和随机漂移的标准偏差,并对斜漂进行判别;
[0202]
根据判据对陀螺漂移是否存在跳数、突变进行判别,并将漂移跳数、突变的数值记录到文件3;
[0203]
将24小时内陀螺仪常值漂移变化的最大值作为24h累计漂移存到文件3;
[0204]
(5)转艏向阶段
[0205]
软件根据2a00命令,和系统航向的变化大于于设定值,判断进入转艏向阶段,收到2a01命令,转艏向阶段结束。软件能对转艏向的时间进行判别,并对转完艏向后的水平陀螺漂移采用误差方程实时估算,方位陀螺仪漂移分别采用gps校的算法和滤波算法进行估算,水平陀螺估计均方根小于0.0008
°
/h时认为估值稳定,方位陀螺漂移估计均方根小于0.001
°
/h时认为估值稳定,录取陀螺漂移估计值。根据每次转完艏向后的三个陀螺的漂移变化值得到陀螺的航向效应数据。估算的漂移数据可在主界面看到。
[0206]
应用本发明的方法生成的测试软件后,平均每个陀螺仪系统级测试所用时间由394h减小到了267h,测试时间平均减少32%,为单位节约了紧张的实验资源,减少了人力物力成本。应用测试软件后,每个陀螺仪系统级测试花费技术人员时间由16h减小到6h,耗费技术人员时间大幅减少62.5%。以2020年为例,共测试约300个陀螺仪,应用测试软件可节约人力成本约3000个工时。应用测试软件降低了对调试人员的技术要求,解放了大量技术人员,使部分技术人员从繁琐的陀螺仪系统测试工作中解放出来,将宝贵的时间、精力投入到科研生产工作中去。
[0207]
原来陀螺仪系统测试由技术人员观察、分析测试数据,对陀螺漂移进行估算,对技术人员有较高的技术要求,且不同的人的评判标准和尺度也存在差异,导致对陀螺仪的性能判别存在一定的误差率。统一评判标准,减小判别误差率也一直是陀螺仪系统测试的努力方向。测试软件对陀螺漂移的解算方案及评判标准进行了统一,应用测试软件后,测试结果判别误差率由8.3%减小到了3.1%,提高了测试结果的准确性。
[0208]
需要强调的是,本发明所述实施例是说明性的,而不是限定性的,因此本发明包括并不限于具体实施方式中所述实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1