一种AMSU-A资料陆地云检测方法
一种amsu-a资料陆地云检测方法
技术领域
1.本发明属于大气科学技术领域,涉及一种amsu-a资料陆地云检测方法。
背景技术:
2.目前数值天气预报的业务同化系统同化的所有卫星资料中,具有大气垂直探测能力的先进微波温度计(amsu
‑
a,advance microwave sounding unit
‑
a)的资料对减小预报误差贡献最大。amsu
‑
a有15个通道,包括3个探测云雨的窗区通道(23.8,31.4,和89.0ghz)和12个分布在50
‑
60ghz探测大气温度廓线的氧气吸收通道。amsu
‑
a观测的辐射亮温并非模式变量,因此需要辐射传输模式进行变量转换。由于目前的辐射传输模式对云中的物理过程刻画有限,模拟亮温与观测亮温会有较大偏差。若同化有云的观测资料,将对预报产生负影响,因此准确的云检测是同化amsu
‑
a资料的前提。
3.国内外已经提出了多种洋面上amsu
‑
a资料云检测的方法,大致可以总结为三类:一是通过模式模拟亮温和观测亮温构建相关指数(english,s.j.et al.,1997);二是基于物理反演的变量,如云水路径(weng,f.et al.,2003),基于微波湿度计窗区通道反演的云冰路径或基于其他星载仪器反演的云产品(qin,z.et al.,2020);三是用神经网络的方法(aires,f.et al.,2011)和其他星载仪器的观测资料来训练amsu
‑
a资料来做云检测。相比于洋面上,陆地的地表发射率与云的发射率更为接近,因此多数洋面上的云检测方法在陆地上并不适用。仅有如使用其他星载仪器的云反演产品,但因时空分辨率的差异,需要进行时空插值,这在业务应用中并不经济和方便。而基于amsu
‑
a资料,仅有一些经验性的方法,且这些方法的准确性都依赖于背景场的准确性。因此,亟需一种简易且方便的amsu
‑
a资料陆地云检测方法。
4.参考文献
5.english,s.j.;renshaw,r.j.;dibben,p.;eyre,j.r.the aapp module for identifying precipitation,ice cloud,liquid water and surface type on the amsu
‑
agrid.proceeding of the 9th international tovs study conference,igls,austria,20
–
26february 1997;pp.119
–
130.
6.weng,f.,zhao,l.,ferraro,r.r.,poe,g.,li,x.,&grody,n.c.(2003).advanced microwave sounding unit cloud and precipitation algorithms.radio science,38(4),33
‑
1.
7.qin,z.,wu,z.,&li,j.(2020).impact of the one
‑
stream cloud detection method on the assimilation of amsu
‑
adata in grapes.remote sensing,12(22),3842.
8.qin,z.,&zou,x.(2016).development and initial assessment of a new land index for microwave humidity sounder cloud detection.journal of meteorological research,30(1),12
‑
37.
技术实现要素:
9.本发明针对因陆地地表发射率与云接近而导致的amsu
‑
a陆地资料云检测困难的问题,基于微波温度计、微波湿度计不同通道对云的不同响应特征,提出一种amsu-a资料陆地云检测方法,提高资料同化系统对amsu
‑
a资料的同化效果。
10.本发明所采用的技术方案为:
11.一种amsu-a资料陆地云检测方法,包括如下步骤:
12.步骤一、选取amsu
‑
a(advance microwave sounding unit
‑
a)的5个低层通道的观测数据来构建云指数a
index
,所述5个低层通道为通道1
‑
4和15,云指数a
index
定义如下:
[0013][0014]
其中,t
b,i
表示amsu
‑
a的通道1
‑
4和15,这5个通道中的第i个通道的观测亮温;云指数a
index
中,标准化的通道3亮温作为分子,指数化调整后的通道15亮温作为分母;
[0015]
步骤二、读取搭载在同一颗卫星上、同时段的mhs(microwave humidity sounder)通道1
‑
5的资料,构建云指数m
index
,云指数m
index
定义如下:
[0016][0017]
其中,t
bm,j
表示mhs5个通道中的第j个通道的观测亮温;云指数m
index
中,标准化的通道1亮温作为分子,调整后的通道2亮温作为分母;
[0018]
步骤三、将云指数m
index
匹配到云指数a
index
上;
[0019]
步骤四、根据每个观测的经纬度信息,判断观测是否位于陆地上空,若位于陆地上空的观测视场满足设定条件,则判断该视场内有云。
[0020]
进一步地,步骤三中,1个amsu
‑
a的视场对应约9个mhs视场;按照每3条微波湿度计扫描线对应1条微波温度计扫描线,每条扫描线上每3个微波湿度计视场对应1个微波温度计视场的规律,将9个mhs视场的m
index
求和后取平均,匹配到1个amsu
‑
a视场的a
index
上。
[0021]
进一步地,步骤四中,所述设定条件为:a
index
>0.1或m
index
>0.35。
[0022]
本发明的有益效果在于:
[0023]
本发明提出的amsu
‑
a资料陆地云检测方法与红外云产品的对比结果表明,该方法可以剔除绝大部分的amsu
‑
a在陆地上的有云观测,云系的结构和边缘都检测的较为准确,仅在小部分卷云处和散落的点状云处有漏检。一个月的批量实验结果表明,本发明提出的云检测方法,可剔除绝大部分模拟亮温偏离观测亮温过多的观测,剔除有云资料后的amsu
‑
a中低层通道(通道1
‑
6和通道15)陆地观测的|o
‑
b|<10k,数据的分布也更加符合正态分布。本发明提出的方法可应用于资料同化系统,改进对amsu
‑
a受云影响通道资料的同化。
附图说明
[0024]
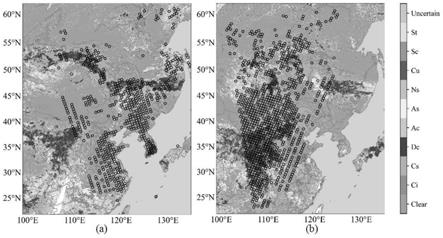
图1为2019年6月26日06utc(图1a)和27日00utc(图1b)amsu
‑
a云指数检出的有云区与匹配的同时刻modis云分类产品在亚洲东北部的分布图;
[0025]
图2为2019年8月9日00utc搭载在noaa19上的amsu
‑
a(黑圈)和mhs(红圈)在东南亚的观测视场分布图;
[0026]
图3为2019年6月26日06utc(图3a)和27日00utc(图3b)amsu
‑
a云指数(黑圈)和mhs云指数(蓝圈)检出的有云区以及匹配的同时刻modis云分类产品分布图;
[0027]
图4为2019年6月13日
‑
7月15日noaa19 amsu
‑
a通道3观测亮温(横轴)和模拟亮温(纵轴)的散点图,蓝圈为mhs云指数检出的有云观测,黑圈为amsu
‑
a检出的有云区,灰圈为晴空观测,其中的三条虚线分别表示o
‑
b=
‑
10,0和10(k);
[0028]
图5为2019年6月13日
‑
7月15日noaa19 amsu
‑
a通道1
‑
6和15剔除有云观测前(左侧)和剔除云检测后(右侧)在不同o
‑
b区间内数据量的分布,填色为数据量;
[0029]
图中,e和n分别代表东经和北纬,clear为晴空,ci为卷云,cs为卷积云,dc为深对流云,ac为高积云,as为高层云,ns为雨层云,cu为积雨云,sc为层积云,st为层云,uncertain表示不确定的云类;k表示开尔文温度。
具体实施方式
[0030]
本发明为解决目前同化系统中amsu
‑
a资料陆地云检测困难的问题,利用amsu
‑
a和mhs的观测亮温,提出一种新的amsu-a资料陆地云检测方法。
[0031]
一种amsu-a资料陆地云检测方法,包括如下步骤:
[0032]
步骤一、选取amsu
‑
a的5个低层通道的观测数据来构建云指数a
index
,5个低层通道为通道1
‑
4和15,云指数a
index
定义如下:
[0033][0034]
其中,t
b,i
表示amsu
‑
a的通道1
‑
4和15,这5个通道中的第i个通道的观测亮温。云指数a
index
中,标准化的通道3亮温作为分子,指数化调整后的通道15亮温作为分母。
[0035]
步骤二、读取搭载在同一颗卫星上、同时段的mhs通道1
‑
5的资料,构建云指数m
index
,云指数m
index
定义如下(qin,z.,and zou,x.,2016):
[0036][0037]
其中,t
bm,j
表示mhs5个通道中的第j个通道的观测亮温。云指数m
index
中,标准化的通道1亮温作为分子,调整后的通道2亮温作为分母。
[0038]
步骤三、将云指数m
index
匹配到云指数a
index
上。
[0039]
amsu
‑
a和mhs搭载在同一颗极轨卫星上,两者的时间偏差可以忽略。amsu
‑
a的幅宽约为2226.8公里,mhs的幅宽约为2348公里,两者的幅宽差异很小。相近的幅宽和观测时间能够保证不同扫描角条件下两者视场的重叠关系。两个仪器的星下点分辨率分别约为48和17公里,mhs的星下点分辨率约为amsu
‑
a的3倍,一条扫描线上分别有30和90个视场,相当于1个amsu
‑
a的视场对应约9个mhs视场。因此,按照每3条微波湿度计扫描线对应1条微波温度计扫描线,每条扫描线上每3个微波湿度计视场对应1个微波温度计视场的规律,将9个mhs视场的m
index
求和后取平均,匹配到1个amsu
‑
a视场的a
index
上。
[0040]
步骤四、根据每个观测的经纬度信息,判断观测是否位于陆地上空,若位于陆地上空的观测视场满足a
index
>0.1或m
index
>0.35,则判断该视场内有云。
[0041]
下面结合附图以及具体的示例对本发明的技术方案作进一步地说明。
[0042]
本示例选取2019年6月13日
‑
7月15日搭载在noaa19上的amsu
‑
a和mhs的资料,为避免高大地形影响,研究区域选在亚洲东北部。
[0043]
计算amsu
‑
a云指数a
index
。根据a
index
定义,选取amsu
‑
a通道1
‑
4和通道15的观测亮温数据,计算出a
index
,选取出位于陆地上的观测后根据a
index
>0.1,即为有云观测。
[0044]
图1给出了2019年6月26日06utc和27日00utc amsu
‑
a云指数检出的有云区与同时刻modis云分类产品的对比图,a
index
能检测出大部分有云区,如图1(a)中贝加尔湖至中国东北的带状云系,朝鲜半岛上空的高云,中国东部沿海的低云,以及图1(b)中的中国中部大范围对流云。但是a
index
也有一定的漏检,卷云和卷层云漏检明显,如在对流云系周围的卷层云和卷云都有一定的漏检,在高纬表现也欠佳,图1(a)中高纬的低云漏检了,同时在图1(b)中内蒙古上空有少量的过检。a
index
的检测精度还无法满足业务应用水平,为改善这一问题,我们加入mhs云指数。
[0045]
计算mhs云指数m
index
,然后将m
index
匹配到相应视场的a
index
上。图2给出了一个时刻搭载在同一颗卫星上的amsu
‑
a和mhs观测视场分布,两个仪器的观测幅宽相近。在星下点,一个amsu
‑
a视场,覆盖了9个mhs视场。因此,按照m
index
的定义,计算每个mhs视场内的m
index
,然后按照每3条mhs扫描线对应1条amsu
‑
a扫描线,每条扫描线上每3个mhs视场对应1个amsu
‑
a视场的规律,将9个mhs视场的m
index
求和后取平均,匹配到1个amsu
‑
a视场的a
index
上。图3给出了与图1同时刻的a
index
(黑圈)和匹配后的m
index
(蓝圈)检出的有云区与同时刻modis云分类产品对比图。m
index
的加入很好的弥补了a
index
的漏检问题,图3(a)中a
index
漏检的对流云外围的卷层云和高纬漏检的低云都被m
index
检测出来,将两个仪器的云指数并流,可以剔除绝大部分的有云观测,云系的结构和边缘都检测的较为准确,仅在小部分卷云处和散落的点状云处有漏检。值得一提的是,这是对比红外云产品的结果,红外相比微波对云更为敏感,而微波能穿透部分薄云,因此被云指数漏检的部分卷云,可能对微波观测并没有任何影响。
[0046]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术方法范围内,可轻易想到的替换或变换方法,都应该涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1