光学传感器系统及其检测方法、碳滑板与流程
1.本发明涉及光学技术领域,尤其涉及一种光学传感器系统及其检测方法、碳滑板。
背景技术:
2.地铁逐渐成为一座城市主要的、高效的交通工具,与其它城市交通运输方式相比,地铁最大的好处便是运量大,运输能力大约是汽车和公交车的七到十倍,可以给居民提供便利,其次,地铁运行速度快,行驶的速度可以达到每小时80km,城际地铁可达到时速160km,节约了较多时间。因此,城市地铁的运营安全,尤其是弓网间正常的工作状态带去了严重的挑战。
3.这是因为,地铁上良好的受电弓弓头工作状态、接触线的工作状态,以及受电弓与接触线之间的受力关系是电客车运营安全的重中之重。其中,受电弓弓头工作状态主要体现在碳滑板的工作状态,受电弓与接触线之间的受力关系主要体现在尤其是受电弓的碳滑板与接触线之间的关系。
4.当地铁在运行时,由于弓网的振动,使得受电弓碳滑板与接触网导线之间的接触压力呈随机变化的特征,导致接触压力不恒定。所以,弓网间稳定的动态接触力是保证地铁具有良好的受流关系和维持持续动力的关键。其中,弓网间稳定的动态接触力主要体现为碳滑板与接触线之间的动态接触力。
5.因此,需要有一定的智能传感器集成到受电弓上,去感知弓网之间的实时工作状态,具体地,可以集成到受电弓碳滑板上,去感知碳滑板与接触线之间的实时工作状态。
6.然而在现有技术中,对于弓网间接触力的检测结果往往偏差较大,准确性不足,且容易带来安全隐患。
7.亟需一种光学传感器系统,能够准确地检测受力范围,并且提高检测安全性。
技术实现要素:
8.本发明解决的技术问题是提供一种光学传感器系统及其检测方法、受电弓,可以准确地检测所述形变板的受力,并且提高检测安全性。
9.为解决上述技术问题,本发明实施例提供一种光学传感器系统,包括:光收发器件,所述光收发器件用于传输光信号,且具有光收发端面;台阶结构,所述台阶结构包括多级台阶,每级台阶的表面为光反射面,且具有各自的光反射波长,仅能够反射与该光反射波长一致的光信号回所述光收发端面;形变板,受力时能够发生弯曲变形,所述光收发器件与所述形变板一端的正面连接,所述台阶结构耦接于所述形变板另一端的正面;其中,当所述形变板未受力时,各级台阶的侧面朝向所述光收发端面。
10.可选的,不同的台阶的表面的光反射波长不同。
11.可选的,所述各级台阶的侧面与所述光收发端面之间的平均距离与预估的所述形变板受到的力量上限有关;其中,预估的所述形变板受到的力量上限越大,所述各级台阶的侧面与所述光收发端面之间的平均距离越小。
12.可选的,所述各级台阶的侧面与所述光收发端面之间的平均距离与预估的所述形变板的变形程度上限有关;其中,预估的所述形变板的变形程度上限越大,所述各级台阶的侧面与所述光收发端面之间的平均距离越小。
13.可选的,所述的光学传感器系统还包括:悬臂梁,所述悬臂梁受力时不发生弯曲变形;其中,所述悬臂梁的一端与所述形变板另一端的正面连接,所述悬臂梁的另一端与所述台阶结构耦接。
14.可选的,所述光收发器件与所述形变板的连接位置记为第一连接点,所述悬臂梁与所述形变板的连接位置记为第二连接点;所述光收发端面的面积和各级台阶的侧面总面积中的较小者记为有效面积;其中,所述有效面积越大,所述第一连接点与第二连接点之间的距离越大。
15.可选的,所述光收发端面的面积大于所述各级台阶的侧面总面积。
16.可选的,所述光收发端面的中心与所述台阶结构的中心齐平。
17.可选的,所述台阶结构的各级台阶的表面能够反射的光反射波长的波长范围覆盖所述光收发器件传输的光信号的波长范围。
18.可选的,所述台阶结构为mems闪耀光栅。
19.可选的,所述光收发器件包括光聚焦器件;其中,所述光聚焦器件用于对传输的光信号以及反射回的光信号进行聚焦处理。
20.可选的,所述光聚焦器件选自:聚焦透镜、光纤准直器。
21.可选的,所述台阶结构的背光面为凸面,所述台阶结构的台阶为锯齿状。
22.可选的,所述的光学传感器系统还包括:mems加速度传感器,位于所述形变板上;其中,所述mems加速度传感器位于所述光收发器件以及台阶结构的同一侧,并且与所述光收发器件以及台阶结构之间存在间隔。
23.为解决上述技术问题,本发明实施例提供一种基于上述的光学传感器系统的检测方法,包括:采用所述光收发器件,经过所述光收发端面传输光信号至所述台阶结构的侧面,并接收由所述台阶结构的侧面反射回的反射光信号;根据接收到的反射光信号的波长确定所述形变板的受力。
24.可选的,所述接收到的反射光信号的波长与所述形变板的受力之间具有一一对应的映射关系;根据所述反射光信号的波长确定所述形变板的受力包括:通过查找所述映射关系,根据所述反射光信号的波长确定所述形变板的受力。
25.可选的,所述接收到的反射光信号的波长与所述形变板的变形程度之间具有一一对应的映射关系,所述形变板的变形程度与所述形变板的受力之间具有一一对应的映射关系;根据所述反射光信号的波长确定所述形变板的受力包括:通过查找所述映射关系,根据所述反射光信号的波长确定所述形变板的变形程度,然后根据所述变形程度确定所述形变板的受力。
26.为解决上述技术问题,本发明实施例提供一种碳滑板,包括:如上述的光学传感器系统;碳滑板底座,所述碳滑板底座与所述光学传感器系统的形变板的背面贴合;其中,所述碳滑板底座的刚度大于等于所述形变板的刚度。
27.与现有技术相比,本发明实施例的技术方案具有以下有益效果:
28.在本发明实施例中,通过设置光学传感器系统包括用于传输光信号的光收发器
件,用于反射光信号的台阶结构以及形变板,可以使得从光收发端面传输的光信号照射至台阶结构的侧面,并且在形变板发生弯曲变形时,位于形变板一端的光收发器件相对于形变板另一端的台阶结构会产生相对位移,导致光不同的台阶的表面的光反射波长不同。信号在台阶结构表面的位置发生移动,由于每级台阶的表面具有各自的光反射波长,因此反射回所述光收发端面的光反射波长被过滤为与反射的台阶一致,由此可以确定是由哪级台阶反射的光信号,进而有机会根据形变板的受力拟合结果、形变板的变形程度、台阶位置(或光反射波长)中一项或多项之间的关系,确定所述形变板的受力。
29.进一步,不同的台阶的表面的光反射波长不同,从而可以根据反射回光收发端面光反射波长,唯一确定是由哪级台阶的侧面反射的光信号,进一步准确确定在形变板发生弯曲变形时,光信号的偏移情况。
30.进一步,预估的所述形变板受到的力量上限越大,所述各级台阶的侧面与所述光收发端面之间的平均距离越小,可以在预估所述形变板会受到的力量上限的基础上,适当设置台阶结构与所述光收发器件之间的距离,避免由于形变板受力过大导致形变严重后,反射回的光信号不能回到所述光收发端面。
31.进一步,预估的所述形变板的变形程度上限越大,所述各级台阶的侧面与所述光收发端面之间的平均距离越小,可以在预估所述形变板会发生的变形程度上限的基础上,适当设置台阶结构与所述光收发器件之间的距离,避免由于形变板容易发生形变导致受少量力即发生严重形变后,反射回的光信号不能回到所述光收发端面。
32.进一步,所述的光学传感器系统还包括悬臂梁,所述悬臂梁受力时不发生弯曲变形,其中,所述悬臂梁的一端与所述形变板另一端的正面连接,所述悬臂梁的另一端与所述台阶结构耦接,相当于利用悬臂梁,延长了可检测的形变板的长度,能够对更长长度的形变板的受力范围进行检测,有效提高检测的准确性。
33.进一步,有效面积越大,所述第一连接点与第二连接点之间的距离越大,可以适当设置悬臂梁的长度,避免由于悬臂梁设置太长导致形变板发生严重形变后,反射回的光信号不能回到所述光收发端面。
34.进一步,所述光收发端面的面积大于所述各级台阶的侧面总面积,有助于在形变板发生弯曲变形,导致反射回的光线角度发生变化时,仍然能够接收到反射光。
35.进一步,所述光收发端面的中心与所述台阶结构的中心齐平,可以在形变板发生弯曲变形时,尽可能地接收到从台阶侧面反射回的反射光。
36.进一步,所述台阶结构的各级台阶的表面能够反射的光反射波长的波长范围覆盖所述光收发器件传输的光信号的波长范围,从而可以有效利用各个台阶,避免由于设置不当导致部分或全部台阶无法反射当前传输的光信号。
37.进一步,所述光收发器件包括光聚焦器件,光聚焦器件用于对传输的光信号以及反射回的光信号进行聚焦处理,可以通过聚焦处理使光信号以平行光的方式照射到台阶结构上,并可以使从台阶结构反射回的反射光能够被再次聚焦后传输,如使得反射光能够沿原光纤光路返回,避免由于光线发散导致错误。
38.进一步,所述光学传感器系统还包括mems加速度传感器,可以用于对形变板的弯曲变形的加速度参数进行检测。
39.进一步,在本发明实施例中,公开了一种碳滑板,包括光学传感器系统以及碳滑板
底座,且碳滑板底座与所述光学传感器系统的形变板的背面贴合,从而可以利用所述光学传感器系统检测碳滑板底座在弯曲变形时的受力,且由于形变板只需与碳滑板底座贴合后即可使用,因此加装的光学传感器系统不受到受电弓弓头形状和尺寸的制约,也即能够大批量安装到不同厂家和型号的受电弓弓头上。
附图说明
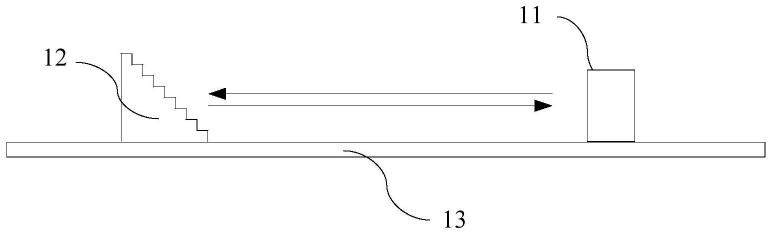
40.图1是本发明实施例中一种光学传感器系统的结构示意图;
41.图2是本发明实施例中一种台阶结构反射光信号的原理示意图;
42.图3是本发明实施例中另一种光学传感器系统的结构透视图;
43.图4是本发明实施例中另一种光学传感器系统的结构侧视图;
44.图5是本发明实施例中又一种台阶结构的侧视图;
45.图6是本发明实施例中一种光学传感器系统的检测方法的流程图。
具体实施方式
46.在现有技术中,需要对地铁的受电弓与接触线之间的接触力关系进行检测,然而弓网间接触力的检测结果往往偏差较大,准确性不足,且容易带来安全隐患。
47.本发明的发明人经过研究发现,目前对弓网关系监测的主要技术有视觉成像技术和电子传感技术。
48.在现有的第一种检测技术中,视觉成像技术属于非接触式测量,因此不能针对弓网间动力学特性,如弓网接触力等,进行有效探测和反馈,且针对大部分受电弓和弓网关系运行参数仅仅起到事后视频查阅和事故追述作用。
49.在现有的第二种检测技术中,电子传感技术虽然属于接触式测量,其在受电弓弓头上分别安装弓网接触力传感器和加速度传感器,但是仍然存在问题。首先,通过有源探测的方式而采集到的信号受电磁干扰严重,为后续数据准确分析带来巨大困难;其次,信号的传输电缆存在安全隐患,安装、布线工艺不当或外力机械损伤后会引发严重的电气绝缘事故,对车内乘客的生命安全造成严重威胁,因此,这种检测技术不适宜广泛推广应用到高铁、地铁等电客车上。
50.此外,在现有技术中,加装的检测器件会受到不同受电弓弓头形状和尺寸的制约,需要多次设计和验证,因此不能大批量安装到不同厂家和型号的受电弓弓头上。
51.在本发明实施例中,通过设置光学传感器系统包括用于传输光信号的光收发器件,用于反射光信号的台阶结构以及形变板,可以使得从光收发端面传输的光信号照射至台阶结构的侧面,并且在形变板发生弯曲变形时,位于形变板一端的光收发器件相对于形变板另一端的台阶结构会产生相对位移,导致光信号在台阶结构表面的位置发生移动,由于每级台阶的侧面具有各自的光反射波长,因此反射回所述光收发端面的光反射波长被过滤为与反射的台阶一致,由此可以确定是由哪级台阶反射的光信号,进而有机会根据形变板的受力范围、形变板的变形程度范围、台阶位置(或光反射波长)之间的关系,确定所述形变板的受力。
52.为使本发明的上述目的、特征和有益效果能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
53.参照图1,图1是本发明实施例中一种光学传感器系统的结构示意图。所述光学传感器系统可以包括光收发器件11、台阶结构12以及形变板13。
54.其中,所述光收发器件11用于传输光信号,且具有光收发端面。
55.具体地,所述光信号可以是激光信号,可以是由外部光源提供的,还可以是由芯片中的集成光源提供的。
56.所述台阶结构12包括多级台阶,每级台阶的表面为光反射面,且具有各自的光反射波长,仅能够反射与该光反射波长一致的光信号回所述光收发端面。
57.需要指出的是,所述台阶的表面可以包括台阶的顶部表面和侧面。
58.在具体实施中,例如可以采用反射材料涂覆或贴合在台阶的表面,相邻的台阶的反射材料可以相同或不同,不同的反射材料可以反射不同波长的光信号。
59.所述形变板13受力时能够发生弯曲变形,所述光收发器件11与所述形变板13一端的正面连接,所述台阶结构12耦接于所述形变板13另一端的正面。
60.其中,当所述形变板13未受力时,各级台阶的侧面朝向所述光收发端面。
61.在本发明实施例中,通过设置光学传感器系统包括用于传输光信号的光收发器件11,用于反射光信号的台阶结构12以及形变板13,可以使得从光收发端面传输的光信号照射至台阶结构12的侧面,并且在形变板13发生弯曲变形时,位于形变板13一端的光收发器件11相对于形变板13另一端的台阶结构12会产生相对位移,导致光不同的台阶的表面的光反射波长不同。信号在台阶结构12侧面的位置发生移动,由于每级台阶的表面具有各自的光反射波长,因此反射回所述光收发端面的光反射波长被过滤为与反射的台阶一致,由此可以确定是由哪级台阶反射的光信号,进而有机会根据形变板13的受力拟合结果、形变板13的变形程度、台阶位置(或光反射波长)中一项或多项之间的关系,确定所述形变板13的受力。
62.进一步地,不同的台阶的表面的光反射波长可以不同。
63.在具体实施中,例如可以采用反射材料涂覆或贴合在台阶的表面,相邻的台阶的反射材料均不同。
64.在本发明实施例中,通过设置不同的台阶的表面的光反射波长不同,从而可以根据反射回光收发端面光反射波长,唯一确定是由哪级台阶的表面反射的光信号,进一步准确确定在形变板13发生弯曲变形时,光信号的偏移情况。
65.进一步地,还可以设置对于所述台阶结构12自上而下的各级台阶,其光反射波长的波长值依次增大或依次减小。
66.在本发明实施例的一种具体实施方式中,发出所述光信号的激光器可以是波长扫描激光器,所述激光器可以具有固定的扫描带宽,以带宽为40nm的激光器为例,其输出波长不断地在1520nm至1560nm的范围内扫描,并在梳状型光谱中扫描到符合1520nm至1560nm范围的波峰信号。
67.以所述台阶结构12包括5级台阶为例,可以设置自上而下(或自下而上)的各级台阶的光反射波长的波长值分别为1520nm、1530nm、1540nm、1550nm、1560nm。
68.如图1中示出的台阶结构12,其台阶的倾斜面与底部平面之间的倾斜角可以选自适当的角度,例如45度至60度,以在更好地对光信号进行反射的同时,避免台阶结构12占据过大面积。
69.参照图2,图2是本发明实施例中一种台阶结构反射光信号的原理示意图。
70.具体地,随着形变板13受力时发生弯曲变形,可以向上翘起或者向下弯曲,此时位于形变板13一端的光收发器件11相对于形变板13另一端的台阶结构12会产生相对位移,导致光信号在台阶结构12侧面的位置发生移动。
71.具体地,当形变板13不发生弯曲变形时,光信号的光路可以为a,当形变板13向下弯曲时,光信号的光路可以为b,当形变板13向上翘起时,光信号的光路可以为c。
72.当光信号照射至光反射波长为1520nm的台阶时,仅波长值为1520nm的光信号会被反射回光收发端面,而波长值为1530nm~1560nm的光信号不会被反射,因此根据接收到的反射光的波长值为1520nm,可以确认光信号照射至光反射波长为1520nm的台阶。
73.进一步地,所述各级台阶的侧面与所述光收发端面之间的平均距离与预估的所述形变板13受到的力量上限有关;其中,预估的所述形变板13受到的力量上限越大,所述各级台阶的侧面与所述光收发端面之间的平均距离越小。
74.具体地,根据历史数据或者经验数据,是可以预估所述形变板13可能受到的力量上限的。
75.需要指出的是,如果所述形变板13贴合在其他器件上,例如贴合在刚度更大的受电弓的碳滑板底座上,则为了检测碳滑板底座的变形程度,可以采用碳滑板底座的受力、碳滑板底座的刚度替代所述形变板13的参数进行检测。
76.其中,刚度是指材料或结构在受力时抵抗弹性变形的能力,是材料或结构弹性变形难易程度的表征。材料的刚度例如可以用弹性模量e来衡量。
77.在本发明实施例中,预估的所述形变板13受到的力量上限越大,所述各级台阶的侧面与所述光收发端面之间的平均距离越小,可以在预估所述形变板13会受到的力量上限的基础上,适当设置台阶结构12与所述光收发器件11之间的距离,避免由于形变板13受力过大导致形变严重后,反射回的光信号不能回到所述光收发端面。
78.进一步地,所述各级台阶的侧面与所述光收发端面之间的平均距离与预估的所述形变板13的变形程度上限有关;其中,预估的所述形变板13的变形程度上限越大,所述各级台阶的侧面与所述光收发端面之间的平均距离越小。
79.具体地,变形程度是表征材料变形前与变形后形状变化大小的比较量,即材料变形量的大小。在受力相同时,刚度大的材料的变形程度小于刚度小的材料。
80.在本发明实施例中,预估的所述形变板13的变形程度上限越大,所述各级台阶的侧面与所述光收发端面之间的平均距离越小,可以在预估所述形变板13会发生的变形程度上限的基础上,适当设置台阶结构12与所述光收发器件11之间的距离,避免由于形变板13容易发生形变导致受少量力即发生严重形变后,反射回的光信号不能回到所述光收发端面。
81.进一步地,所述光收发端面的面积大于所述各级台阶的侧面总面积。
82.在本发明实施例中,所述光收发端面的面积大于所述各级台阶的侧面总面积,有助于在形变板13发生弯曲变形,导致反射回的光线角度发生变化时,仍然能够接收到反射光。
83.进一步地,所述光收发端面的中心与所述台阶结构12的中心可以齐平。
84.在本发明实施例中,所述光收发端面的中心与所述台阶结构12的中心齐平,可以
在形变板13发生弯曲变形时,尽可能地接收到从台阶侧面反射回的反射光。
85.进一步地,所述台阶结构12的各级台阶的表面能够反射的光反射波长的波长范围覆盖所述光收发器件11传输的光信号的波长范围。
86.在本发明实施例中,所述台阶结构12的各级台阶的表面能够反射的光反射波长的波长范围覆盖所述光收发器件11传输的光信号的波长范围,从而可以有效利用各个台阶,避免由于设置不当导致部分或全部台阶无法反射当前传输的光信号。
87.进一步地,所述台阶结构12可以为微机电系统(micro-electro-mechanical system,mems)闪耀光栅。
88.需要指出的是,所述台阶结构12还可以为微光机电系统(micro-opto-electro-mechanical system,moems)闪耀光栅、微光机械系统(micro-opto-mechanical system,moms)闪耀光栅。
89.关于所述闪耀光栅(blazed grating),当光栅刻划成锯齿形的线槽断面时,光栅的光能量便集中在预定的方向上,即某一光谱级上。从这个方向探测时,光谱的强度最大,这种现象称为闪耀(blaze),这种光栅称为闪耀光栅。在这样刻成的闪耀光栅中,起衍射作用的槽面是个光滑的平面,它与光栅的表面一夹角,称为闪耀角(blaze angle)。最大光强度所对应的波长,称为闪耀波长(blaze wavelength)。
90.结合参照图3和图4,图3是本发明实施例中另一种光学传感器系统的结构透视图,图4是本发明实施例中另一种光学传感器系统的结构侧视图。
91.所述另一种光学传感器系统可以包括光收发器件21、台阶结构22、形变板23,还可以包括以下一项或多项:悬臂梁24、悬臂梁基座241、mems加速度芯片支座25、mems加速度传感器26、罩壳27。
92.其中,有关光收发器件21、台阶结构22、形变板23的更多内容,可以参照前文以及图1中光收发器件11、台阶结构12、形变板13的描述,此处不再赘述。
93.进一步地,所述悬臂梁24受力时不发生弯曲变形;其中,所述悬臂梁24的一端与所述形变板23另一端的正面连接,所述悬臂梁24的另一端与所述台阶结构22耦接。
94.其中,所述悬臂梁24的一端可以通过悬臂梁基座241与所述形变板23另一端的正面连接。
95.具体地,所述悬臂梁24的刚度足够大,以使得所述悬臂梁24受力时发生的弯曲变形远小于所述形变板23受力时发生的弯曲变形。
96.在本发明实施例中,所述的光学传感器系统还包括悬臂梁24,所述悬臂梁24受力时不发生弯曲变形,相当于利用悬臂梁24,延长了可检测的形变板的长度,能够对更长长度的形变板的受力进行检测,有效提高检测的准确性。
97.例如在图1中,未设置悬臂梁时,则仅能检测台阶结构12与光收发器件11之间长度的形变板13的受力情况,如果形变板13非常长,则难以准确呈现整个形变板13的受力结果。
98.而在图3中,设置悬臂梁24时,则可以检测悬臂梁24与所述形变板的连接位置(例如所述悬臂梁基座241)与所述光收发器件21之间长度的形变板13的受力情况。
99.可以理解的是,通过利用悬臂梁24,延长了可检测的形变板的长度,能够对更长长度的形变板的受力进行检测。
100.进一步地,所述光收发器件21可以包括光聚焦器件211,还可以包括光聚焦器件基
座212,还可以包括光纤尾缆堵头213。
101.其中,所述光聚焦器件211看用于对传输的光信号以及反射回的光信号进行聚焦处理。
102.所述光纤尾缆堵头213用于传输所述传输的光信号以及反射回的光信号。
103.在本发明实施例中,所述光收发器件21包括光聚焦器件211,光聚焦器件211用于对传输的光信号以及反射回的光信号进行聚焦处理,可以通过聚焦处理使光信号以平行光的方式照射到台阶结构22上,并可以使从台阶结构22反射回的反射光能够被再次聚焦后传输,如使得反射光能够沿原光纤光路返回,避免由于光线发散导致错误。
104.更进一步地,所述光聚焦器件211可以选自:聚焦透镜、光纤准直器。
105.其中,所述聚焦透镜例如可以为凸透镜,用于聚焦传输的光信号。
106.所述光纤准直器可以由光纤尾纤与自聚焦透镜精确定位而成,可以将光纤内的传输光转变成准直光(平行光),或将外界平行(近似平行)光耦合至单模光纤内。
107.进一步地,所述光收发器件21与所述形变板23的连接位置记为第一连接点,所述悬臂梁24与所述形变板23的连接位置记为第二连接点;所述光收发端面的面积和各级台阶的侧面总面积中的较小者记为有效面积;其中,所述有效面积越大,所述第一连接点与第二连接点之间的距离越大。
108.如图3所示,所述光收发器件21与所述形变板23的连接位置可以为所述光聚焦器件基座212,所述悬臂梁24与所述形变板23的连接位置可以为所述悬臂梁基座241,则所述有效面积越大,所述光聚焦器件基座212与悬臂梁基座241之间的距离越大。
109.在本发明实施例中,有效面积越大,所述第一连接点与第二连接点之间的距离越大,可以适当设置悬臂梁24的长度,避免由于悬臂梁24设置太长导致形变板23发生严重形变后,反射回的光信号不能回到所述光收发端面。
110.参照图5,图5是本发明实施例中又一种台阶结构的侧视图。
111.所述台阶结构32的背光面可以为凸面,所述台阶结构32的台阶可以为锯齿状,从而可以在接收并反射光信号的过程中,更加聚焦,避免由于光信号的发散而不能反射回所述光收发器件。
112.可以理解的是,以图1示出的台阶结构12为例,其背光面为左侧的侧面以及底面。
113.进一步地,如图5中示出的台阶结构32,其台阶的倾斜面与底部平面之间的倾斜角(如图5示出的角度k)可以选自适当的角度,例如30度至60度,例如为45度,以在更好地对光信号进行反射的同时,避免台阶结构32占据过大面积。
114.进一步地,如图3所示,所述mems加速度传感器26可以位于所述形变板23上;其中,所述mems加速度传感器26可以位于所述光收发器件21以及台阶结构22的同一侧,并且与所述光收发器件21以及台阶结构22之间存在间隔。
115.在形变板23上,可以依次分布mems加速度传感器26、台阶结构22以及光收发器件21。
116.mems加速度芯片支座25可以用于固定mems加速度传感器26,例如可以以芯片方式固定。
117.mems加速度芯片支座25可以安装仅测量垂向方向上的加速度传感器,也可以安装测量垂向-横向-纵向方向上的3向加速度传感器。
118.mems加速度传感器26的尾纤可以通过所述光纤尾缆堵头213穿出所述光学传感器系统。
119.在本发明实施例中,所述光学传感器系统还可以包括mems加速度传感器26,可以用于对形变板23的弯曲变形的加速度参数进行检测。
120.所述光纤尾缆堵头213可以位于形变板23一端,可以实现集束光纤和引出光缆,还可以对传感器起到密封作用。
121.所述罩壳27可以对光学传感器系统进行遮盖和保护。
122.参照图6,图6是本发明实施例中一种光学传感器系统的检测方法的流程图。所述光学传感器系统的检测方法可以包括步骤s61至步骤s62:
123.步骤s61:采用所述光收发器件,经过所述光收发端面传输光信号至所述台阶结构的表面,并接收由所述台阶结构的表面反射回的反射光信号;
124.步骤s62:根据接收到的反射光信号的波长确定所述形变板的受力。
125.在本发明实施例的一种具体实施方式中,所述接收到的反射光信号的波长与所述形变板的受力之间具有一一对应的映射关系;根据所述反射光信号的波长确定所述形变板的受力包括:通过查找所述映射关系,根据所述反射光信号的波长确定所述形变板的受力。
126.在一种具体应用中,可以创建拟合公式,进而通过拟合公式确定受力。
127.具体地,可以预先进行试验,例如在形变板上悬挂已知重量,并检测接收到的反射光信号的波长,然后依次增大或减小悬挂的重量,并继续检测接收到的反射光信号的波长,进而制备接收到的反射光信号的多个波长与所述形变板的多个受力之间的映射关系,进而根据映射关系创建拟合公式,从而可以在后续步骤中,根据接收到的反射光信号的波长,通过拟合公式确定形变板的受力。
128.在本发明实施例的另一种具体实施方式中,所述接收到的反射光信号的波长与所述形变板的变形程度之间具有一一对应的映射关系,所述形变板的变形程度与所述形变板的受力之间具有一一对应的映射关系;根据所述反射光信号的波长确定所述形变板的受力包括:通过查找所述映射关系,根据所述反射光信号的波长确定所述形变板的变形程度,然后根据所述变形程度确定所述形变板的受力。
129.在具体实施中,可以基于接收到的反射光信号的波长与所述形变板的变形程度范围创建拟合公式,以及基于所述形变板的变形程度与所述形变板的受力之间具有一一对应的映射关系创建拟合公式,进而通过拟合公式确定受力。
130.具体地,可以预先进行试验,例如在形变板上悬挂已知重量,并检测形变板的变形程度,以及检测接收到的反射光信号的波长,然后依次增大或减小悬挂的重量,并继续检测形变板的变形程度,以及检测接收到的反射光信号的波长,进而制备接收到的反射光信号的波长、形变板的变形程度,以及与所述形变板的受力之间的映射关系,进而根据映射关系创建拟合公式,从而可以在后续步骤中,根据拟合公式以及接收到的反射光信号的波长,确定形变板的变形程度以及形变板的受力。
131.在本发明实施例中,通过设置光学传感器系统包括用于传输光信号的光收发器件,用于反射光信号的台阶结构以及形变板,可以使得从光收发端面传输的光信号照射至台阶结构的侧面,并且在形变板发生弯曲变形时,位于形变板一端的光收发器件相对于形变板另一端的台阶结构会产生相对位移,导致光信号在台阶结构表面的位置发生移动,由
于每级台阶的表面具有各自的光反射波长,因此反射回所述光收发端面的光反射波长被过滤为与反射的台阶一致,由此可以确定是由哪级台阶反射的光信号,进而有机会根据形变板的受力拟合结果、形变板的变形程度、台阶位置(或光反射波长)之间的关系,确定所述形变板的受力。
132.在本发明实施例中,还公开了一种碳滑板,包括:前文以及图1至5描述的光学传感器系统;碳滑板底座,所述碳滑板底座与所述光学传感器系统的形变板的背面贴合;其中,所述碳滑板底座的刚度大于等于所述形变板的刚度。
133.在本发明实施例中,公开了一种碳滑板,包括光学传感器系统以及碳滑板底座,且碳滑板底座与所述光学传感器系统的形变板的背面贴合,从而可以利用所述光学传感器系统检测碳滑板底座在弯曲变形时的受力,且由于形变板只需与碳滑板底座贴合后即可使用,因此加装的光学传感器系统不受到受电弓弓头形状和尺寸的制约,也即能够大批量安装到不同厂家和型号的受电弓弓头上。
134.虽然本发明披露如上,但本发明并非限定于此。任何本领域技术人员,在不脱离本发明的精神和范围内,均可作各种更动与修改,因此本发明的保护范围应当以权利要求所限定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1